3-Phase BLDC Motor Control with Sensorless Back EMF ... - Freescale
3-Phase BLDC Motor Control with Sensorless Back EMF ... - Freescale
3-Phase BLDC Motor Control with Sensorless Back EMF ... - Freescale

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
SW Design<br />
.<br />
Reference<br />
Speed<br />
(Omega_Desired)<br />
-<br />
Speed<br />
Error<br />
PI<br />
<strong>Control</strong>ler<br />
Corrected<br />
Speed<br />
(U_Desired)<br />
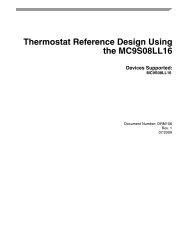
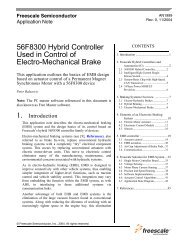
Figure 7-5. Closed Loop <strong>Control</strong> System<br />
3-<strong>Phase</strong> <strong>BLDC</strong> <strong>Motor</strong> <strong>Control</strong>, Rev. 1<br />
<strong>Control</strong>led<br />
System<br />
Actual <strong>Motor</strong><br />
Speed<br />
(Omega_Actual)<br />
The speed closed loop control is characterized by the feedback of the actual motor speed. This information is<br />
compared <strong>with</strong> the reference set point and the error signal is generated. The magnitude and polarity of the error<br />
signal corresponds to the difference between the actual and desired speed. Based on the speed error, the PI<br />
controller generates the corrected motor voltage in order to compensate for the error.<br />
The speed controller works <strong>with</strong> a constant execution (sampling) period. The request is driven from the timer<br />
interrupt <strong>with</strong> the constant PER_SPEED_SAMPLE_S. The PI controller is proportional and integral<br />
constants were set experimentally.<br />
7.2.4 Process Current PI <strong>Control</strong>ler<br />
The process is similar to the Speed controller. The I_Dc_Bus current is controlled based on the<br />
U_Dc_Bus_Desired Reference current. The current controller is processed only during Alignment stage.<br />
The current controller works <strong>with</strong> a constant execution (sampling) period. determined by PWM frequency:<br />
Current <strong>Control</strong>ler period = 1/pwm frequency.<br />
The PI controller is proportional and integral constants were set experimentally.<br />
7.2.5 Process PWM Generation<br />
The Process PWM Generation creates:<br />
• the <strong>BLDC</strong> motor commutation pattern as described in Section 1.<br />
• required duty cycle<br />
7.2.6 Process Fault <strong>Control</strong><br />
The Process Fault <strong>Control</strong> is used for drive protection. It can be understood from Figure 7-4. The<br />
DriveFaultStatus is passed to the PWM Generation process and to the Application State Machine process in<br />
order to disable the PWMs and to control the application accordingly.<br />
7.3 State Diagram<br />
The state diagrams of the whole SW are described below.<br />
38 <strong>Freescale</strong> Semiconductor<br />
Preliminary