Spectral Estimation Using a MUSIC Algorithm - Altera
Spectral Estimation Using a MUSIC Algorithm - Altera
Spectral Estimation Using a MUSIC Algorithm - Altera

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Spectral</strong> <strong>Estimation</strong> <strong>Using</strong> a <strong>MUSIC</strong> <strong>Algorithm</strong><br />
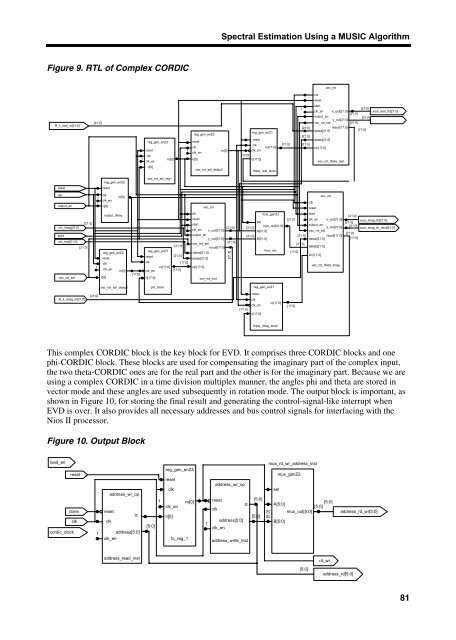
Figure 9. RTL of Complex CORDIC<br />
vec_rot<br />
clk<br />
reset<br />
R_x_real_in[21:0]<br />
[21:0]<br />
reg_gen_enZ2<br />
reset<br />
clk<br />
1 ro[0]<br />
clk_en<br />
1<br />
reg_gen_enZ2<br />
reset<br />
clk<br />
clk_en<br />
ri[0]<br />
ro[0]<br />
reg_gen_enZ1<br />
reset<br />
clk<br />
ro[17:0]<br />
clk_en<br />
[17:0]<br />
ri[17:0]<br />
[17:0]<br />
1<br />
[21:0]<br />
[21:0]<br />
[17:0]<br />
start<br />
[21:0]<br />
clk_en x_out[21:0]<br />
xout_real_th[21:0]<br />
[21:0]<br />
output_en<br />
[21:0]<br />
y_out[21:0]<br />
vec_rot_sel<br />
[21:0]<br />
result[17:0]<br />
dataa[21:0]<br />
[17:0]<br />
datab[21:0]<br />
zin[17:0]<br />
vec_rot_theta_real<br />
ri[0]<br />
vec_rot_sel_delay2<br />
theta_real_store<br />
reset<br />
reg_gen_enZ2<br />
reset<br />
vec_rot_sel_reg1<br />
clk<br />
output_en<br />
1<br />
clk<br />
clk_en<br />
ri[0]<br />
ro[0]<br />
vec_rot<br />
clk<br />
reset<br />
vec_rot<br />
output_delay<br />
[21:0]<br />
xin_imag[21:0]<br />
start<br />
xin_real[21:0]<br />
[21:0]<br />
reg_gen_enZ2<br />
reset<br />
clk<br />
1<br />
clk_en<br />
ro[0]<br />
vec_rot_sel<br />
ri[0]<br />
[17:0]<br />
1<br />
[21:0]<br />
reg_gen_enZ1<br />
reset<br />
[21:0]<br />
clk<br />
[17:0]<br />
ro[17:0]<br />
clk_en<br />
[17:0]<br />
ri[17:0]<br />
clk<br />
reset<br />
start<br />
[21:0]<br />
clk_en x_out[21:0]<br />
output_en<br />
y_out[21:0]<br />
vec_rot_sel<br />
[21:0]<br />
result[17:0]<br />
dataa[21:0]<br />
datab[21:0]<br />
zin[17:0]<br />
vec_rot_inst<br />
mux_genZ3<br />
sel<br />
mux_out[21:0]<br />
[21:0]<br />
A[21:0]<br />
[21:0]<br />
B[21:0]<br />
mux_vec<br />
start<br />
1 [21:0]<br />
[21:0] clk_en x_out[21:0]<br />
xout_imag_th[21:0]<br />
[21:0]<br />
output_en<br />
y_out[21:0]<br />
[21:0]<br />
xout_imag_th_next[21:0]<br />
vec_rot_sel<br />
[21:0]<br />
[21:0]<br />
result[17:0]<br />
dataa[21:0]<br />
[17:0]<br />
[21:0]<br />
datab[21:0]<br />
[17:0]<br />
zin[17:0]<br />
vec_rot_theta_imag<br />
vec_rot_sel_delay1<br />
phi_store<br />
reg_gen_enZ1<br />
R_x_imag_in[21:0]<br />
[21:0]<br />
[17:0]<br />
reset<br />
clk<br />
clk_en<br />
ri[17:0]<br />
ro[17:0]<br />
[17:0]<br />
theta_imag_store<br />
This complex CORDIC block is the key block for EVD. It comprises three CORDIC blocks and one<br />
phi-CORDIC block. These blocks are used for compensating the imaginary part of the complex input,<br />
the two theta-CORDIC ones are for the real part and the other is for the imaginary part. Because we are<br />
using a complex CORDIC in a time division multiplex manner, the angles phi and theta are stored in<br />
vector mode and these angles are used subsequently in rotation mode. The output block is important, as<br />
shown in Figure 10, for storing the final result and generating the control-signal-like interrupt when<br />
EVD is over. It also provides all necessary addresses and bus control signals for interfacing with the<br />
Nios II processor.<br />
Figure 10. Output Block<br />
load_en<br />
reset<br />
done<br />
clk<br />
cordic_clock<br />
1<br />
address_wr_op<br />
reset<br />
tc<br />
clk<br />
address[5:0]<br />
clk_en<br />
[5:0]<br />
1<br />
reg_gen_enZ4<br />
reset<br />
clk<br />
ro[0]<br />
clk_en<br />
ri[0]<br />
tc_reg_1<br />
address_wr_op<br />
reset<br />
[5:0]<br />
tc<br />
clk<br />
[5:0]<br />
address[5:0]<br />
1<br />
clk_en<br />
address_wirte_inst<br />
[5:0]<br />
mux_rd_wr_address_inst<br />
sel<br />
mux_genZ2<br />
[5:0]<br />
A[5:0]<br />
[5:0]<br />
mux_out[5:0]<br />
B[5:0]<br />
address_rd_wr[5:0]<br />
address_read_inst<br />
[5:0]<br />
rd_wr<br />
address_rd[5:0]<br />
81