

Annual Report 2002 - Ãrebro universitet
Annual Report 2002 - Ãrebro universitet
Annual Report 2002 - Ãrebro universitet

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Annual</strong> <strong>Report</strong> <strong>2002</strong> 41<br />
2.2 Mobile Robotics Lab<br />
Our objective is to advance the state-of-the-art in the synthesis of intelligent physical agents<br />
capable of autonomous operation in natural environments. The world "natural" denotes real<br />
world environments that have not been specifically modified to accommodate the agents.<br />
These systems must incorporate motor and perceptual processes to interface with the physical<br />
world, and abstract cognitive processes to reason about the world and the available options.<br />
2.2.1 Focus<br />
The focus of the research performed in this laboratory is on the crucial problem of the<br />
integration of cognitive processes into a physically embedded reasoning system. In particular,<br />
we address three specific, important facets of the integration problem:<br />
1. The integration between abstract reasoning about actions and goals, and the performance<br />
of physical action;<br />
2. The integration between models of the world used at different levels of abstractions; and<br />
3. The integration between the symbols used by the reasoning processes to denote physical<br />
objects, and the perceptual data corresponding to these objects.<br />
The methodology adopted is based on the tight integration between interdisciplinary<br />
investigation, formal analysis, and practical experimentation. The experiments are to be<br />
conducted on different tasks, including: (i) observation, navigation, and manipulation in<br />
complex real-world environments; (ii) robot-human cooperation, where the sensori-motoric<br />
and cognitive abilities are distributed between the robot and the human; and (iii) teams of<br />
cooperating robots, where these abilities are distributed among robots.<br />
2.2.2 Research Projects<br />
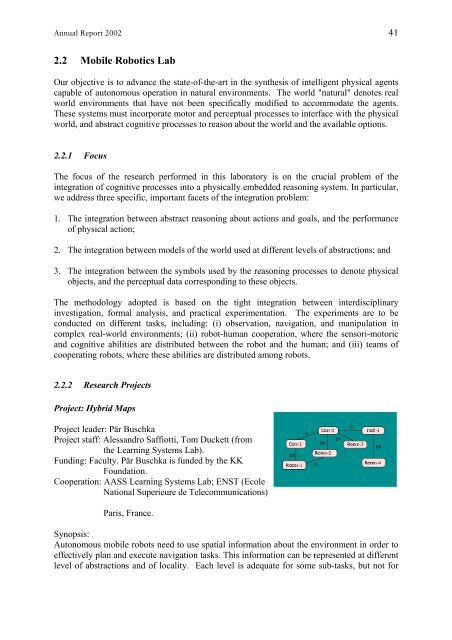
Project: Hybrid Maps<br />
Project leader: Pär Buschka<br />
Project staff: Alessandro Saffiotti, Tom Duckett (from<br />
the Learning Systems Lab).<br />
Funding: Faculty. Pär Buschka is funded by the KK<br />
Foundation.<br />
Cooperation: AASS Learning Systems Lab; ENST (Ecole<br />
National Superieure de Telecommunications)<br />
Paris, France.<br />
Synopsis:<br />
Autonomous mobile robots need to use spatial information about the environment in order to<br />
effectively plan and execute navigation tasks. This information can be represented at different<br />
level of abstractions and of locality. Each level is adequate for some sub-tasks, but not for














