Processus de Lévy en Finance - Laboratoire de Probabilités et ...
Processus de Lévy en Finance - Laboratoire de Probabilités et ...
Processus de Lévy en Finance - Laboratoire de Probabilités et ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Thèse prés<strong>en</strong>tée pour obt<strong>en</strong>ir le titre <strong>de</strong><br />
DOCTEUR DE L’ECOLE POLYTECHNIQUE<br />
specialité: Mathématiques Appliquées<br />
par<br />
P<strong>et</strong>er TANKOV<br />
<strong>Processus</strong> <strong>de</strong> Lévy <strong>en</strong> <strong>Finance</strong>:<br />
Problèmes Inverses <strong>et</strong><br />
Modélisation <strong>de</strong> Dép<strong>en</strong>dance<br />
Lévy Processes in <strong>Finance</strong>: Inverse Problems and Dep<strong>en</strong><strong>de</strong>nce Mo<strong>de</strong>lling<br />
Thèse sout<strong>en</strong>ue le 21 septembre 2004 <strong>de</strong>vant le jury composé <strong>de</strong><br />
Ole E. Barndorff-Niels<strong>en</strong><br />
Rama Cont<br />
Nicole El Karoui<br />
Monique Jeanblanc<br />
Bernard Lapeyre<br />
Agnès Sulem<br />
Rapporteur<br />
Directeur <strong>de</strong> thèse<br />
Rapporteur
Résumé<br />
C<strong>et</strong>te thèse traite <strong>de</strong> la modélisation <strong>de</strong> prix boursiers par les expon<strong>en</strong>tielles <strong>de</strong> processus<br />
<strong>de</strong> Lévy. La première partie développe une métho<strong>de</strong> non-paramétrique stable <strong>de</strong> calibration<br />
<strong>de</strong> modèles expon<strong>en</strong>tielle-Lévy, c’est-à-dire <strong>de</strong> reconstruction <strong>de</strong> ces modèles à partir <strong>de</strong>s prix<br />
d’options cotées sur un marché financier. J’étudie les propriétés <strong>de</strong> converg<strong>en</strong>ce <strong>et</strong> <strong>de</strong> stabilité<br />
<strong>de</strong> c<strong>et</strong>te métho<strong>de</strong> <strong>de</strong> calibration, décris sa réalisation numérique <strong>et</strong> donne <strong>de</strong>s exemples <strong>de</strong> son<br />
utilisation. L’approche adoptée ici consiste à reformuler le problème <strong>de</strong> calibration comme<br />
celui <strong>de</strong> trouver un modèle expon<strong>en</strong>tielle-Lévy risque-neutre qui reproduit les prix d’options<br />
cotées avec la plus gran<strong>de</strong> précision possible <strong>et</strong> qui a l’<strong>en</strong>tropie relative minimale par rapport<br />
à un processus “a priori” donné. Ce problème est alors résolu <strong>en</strong> utilisant la métho<strong>de</strong> <strong>de</strong><br />
régularisation, prov<strong>en</strong>ant <strong>de</strong> la théorie <strong>de</strong> problèmes inverses mal posés. L’application <strong>de</strong> ma<br />
métho<strong>de</strong> <strong>de</strong> calibration aux données empiriques <strong>de</strong> prix d’options sur indice perm<strong>et</strong> d’étudier<br />
certaines propriétés <strong>de</strong>s mesures <strong>de</strong> Lévy implicites qui correspon<strong>de</strong>nt aux prix <strong>de</strong> marché<br />
La <strong>de</strong>uxième partie est consacrée au développem<strong>en</strong>t d’une métho<strong>de</strong> perm<strong>et</strong>tant <strong>de</strong> caractériser<br />
les structures <strong>de</strong> dép<strong>en</strong>dance <strong>en</strong>tre les composantes d’un processus <strong>de</strong> Lévy multidim<strong>en</strong>sionnel<br />
<strong>et</strong> <strong>de</strong> construire <strong>de</strong>s modèles expon<strong>en</strong>tielle-Lévy multidim<strong>en</strong>sionnels. C<strong>et</strong> objectif<br />
est atteint grâce à l’introduction <strong>de</strong> la notion <strong>de</strong> copule <strong>de</strong> Lévy, qui peut être considérée<br />
comme l’analogue pour les processus <strong>de</strong> Lévy <strong>de</strong> la notion <strong>de</strong> copule, utilisée <strong>en</strong> statistique<br />
pour modéliser la dép<strong>en</strong>dance <strong>en</strong>tre les variables aléatoires réelles. Les exemples <strong>de</strong> familles<br />
paramétriques <strong>de</strong> copules <strong>de</strong> Lévy sont donnés <strong>et</strong> une métho<strong>de</strong> <strong>de</strong> simulation <strong>de</strong> processus <strong>de</strong><br />
Lévy multidim<strong>en</strong>sionnels, dont la structure <strong>de</strong> dép<strong>en</strong>dance est décrite par une copule <strong>de</strong> Lévy,<br />
est proposée.<br />
Mots clefs: processus <strong>de</strong> Lévy, produits dérivés, calibration, problèmes inverses, régularisation,<br />
problèmes mal posés, <strong>en</strong>tropie relative, copules, dép<strong>en</strong>dance.
Abstract<br />
This thesis <strong>de</strong>als with the mo<strong>de</strong>lling of stock prices by the expon<strong>en</strong>tials of Lévy processes.<br />
In the first part we <strong>de</strong>velop a non-param<strong>et</strong>ric m<strong>et</strong>hod allowing to calibrate expon<strong>en</strong>tial Lévy<br />
mo<strong>de</strong>ls, that is, to reconstruct such mo<strong>de</strong>ls from the prices of mark<strong>et</strong>-quoted options. We<br />
study the stability and converg<strong>en</strong>ce properties of this calibration m<strong>et</strong>hod, <strong>de</strong>scribe its numerical<br />
implem<strong>en</strong>tation and give examples of its use. Our approach is first to reformulate the calibration<br />
problem as that of finding a risk-neutral expon<strong>en</strong>tial Lévy mo<strong>de</strong>l that reproduces the option<br />
prices with the best possible precision and has the smallest relative <strong>en</strong>tropy with respect to a<br />
giv<strong>en</strong> prior process, and th<strong>en</strong> to solve this problem via the regularization m<strong>et</strong>hodology, used in<br />
the theory of ill-posed inverse problems. Applying this calibration m<strong>et</strong>hod to the empirical data<br />
s<strong>et</strong>s of in<strong>de</strong>x options allows us to study some properties of Lévy measures, implied by mark<strong>et</strong><br />
prices.<br />
The second part of this thesis proposes a m<strong>et</strong>hod allowing to characterize the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
structures among the compon<strong>en</strong>ts of a multidim<strong>en</strong>sional Lévy process and to construct multidim<strong>en</strong>sional<br />
expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls. This is done by introducing the notion of Lévy copula,<br />
which can be se<strong>en</strong> as an analog for Lévy processes of the notion of copula, used in statistics<br />
to mo<strong>de</strong>l <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> real-valued random variables. We give examples of param<strong>et</strong>ric<br />
families of Lévy copulas and <strong>de</strong>velop a m<strong>et</strong>hod for simulating multidim<strong>en</strong>sional Lévy processes<br />
with <strong>de</strong>p<strong>en</strong><strong>de</strong>nce giv<strong>en</strong> by a Lévy copula.<br />
Key words: Lévy processes, option pricing, calibration, inverse problems, regularization,<br />
ill-posed problems, relative <strong>en</strong>tropy, copulas, <strong>de</strong>p<strong>en</strong><strong>de</strong>nce
Remerciem<strong>en</strong>ts<br />
Je voudrais, <strong>en</strong> premier lieu, exprimer toute ma gratitu<strong>de</strong> à Rama Cont, mon directeur <strong>de</strong><br />
thèse, non seulem<strong>en</strong>t pour sa disponibilité <strong>et</strong> son souti<strong>en</strong> au cours <strong>de</strong> ces trois années, mais<br />
aussi pour avoir fait preuve, à plusieurs reprises, <strong>de</strong> sa confiance <strong>en</strong> moi, <strong>et</strong> pour m’avoir aidé,<br />
<strong>en</strong> m’<strong>en</strong>voyant à <strong>de</strong>s nombreuses confér<strong>en</strong>ces <strong>et</strong> séminaires, à faire connaître mon travail <strong>de</strong><br />
recherche.<br />
Je n’aurais jamais p<strong>en</strong>sé à travailler dans le domaine <strong>de</strong> la finance mathématique si je n’avais<br />
pas suivi d’excell<strong>en</strong>ts cours <strong>de</strong> Nicole El Karoui, d’abord à l’Ecole Polytechnique <strong>et</strong> <strong>en</strong>suite au<br />
DEA <strong>de</strong> Probabilités <strong>et</strong> Applications <strong>de</strong> l’Université Paris VI. Je la remercie pour cela mais aussi<br />
pour les nombreuses interactions qu’on a eu au cours <strong>de</strong> ma thèse, notamm<strong>en</strong>t à l’occasion du<br />
groupe <strong>de</strong> travail du CMAP.<br />
Jan Kalls<strong>en</strong> m’a expliqué comm<strong>en</strong>t généraliser la notion <strong>de</strong> copule <strong>de</strong> Lévy, que j’ai introduite<br />
pour les processus <strong>de</strong> Lévy aux sauts positifs, au cas <strong>de</strong>s processus <strong>de</strong> Lévy généraux. Je<br />
le remercie égalem<strong>en</strong>t pour avoir bi<strong>en</strong> voulu écrire un article joint sur ce suj<strong>et</strong> <strong>et</strong> pour <strong>de</strong>s<br />
nombreuses discussions qu’on a eu p<strong>en</strong>dant ce travail.<br />
Je remercie Ole Barndorff-Niels<strong>en</strong>, Thomas Mikosch <strong>et</strong> Elisa Nicolato pour avoir fait <strong>de</strong> ma<br />
visite à MaPhySto <strong>en</strong> août-septembre 2002 un mom<strong>en</strong>t inoubliable <strong>et</strong> pour les discussions qu’on<br />
a eu p<strong>en</strong>dant <strong>et</strong> après mon séjour au Danemark, qui ont été toutes très utiles.<br />
Je voudrais égalem<strong>en</strong>t exprimer ma reconnaissance à Douglas N. Arnold and Scot Adams qui<br />
m’ont accueilli p<strong>en</strong>dant ma visite à l’Institut <strong>de</strong> Mathématiques <strong>et</strong> Applications <strong>de</strong> l’Université<br />
<strong>de</strong> Minnesota, un séjour auquel c<strong>et</strong>te thèse doit beaucoup.<br />
Mes remerciem<strong>en</strong>ts vont aussi à Philippe Durand <strong>et</strong> Emmanuel Bacry, qui ont été responsables<br />
<strong>de</strong> <strong>de</strong>ux stages que j’ai effectués avant <strong>de</strong> comm<strong>en</strong>cer c<strong>et</strong>te thèse, l’un au Crédit Lyonnais<br />
<strong>et</strong> l’autre au CMAP, <strong>et</strong> qui ont beaucoup fait pour ma formation sci<strong>en</strong>tifique.<br />
Je suis reconnaissant à Christoph Schwab <strong>et</strong> Ana-Maria Matache d’avoir partagé avec moi<br />
leurs idées sur les métho<strong>de</strong>s numériques pour les processus <strong>de</strong> Lévy, au cours <strong>de</strong> leurs visites à<br />
Paris <strong>et</strong> <strong>de</strong> ma visite à Zurich.<br />
Je remercie <strong>en</strong>fin tous les participants du groupe <strong>de</strong> travail du CMAP <strong>de</strong> toutes nos interactions<br />
sci<strong>en</strong>tifiques, mais aussi d’avoir contribué à une ambiance très agréable <strong>et</strong> chaleureuse<br />
dans notre équipe <strong>de</strong> modélisation financière.
Cont<strong>en</strong>ts<br />
Remarks on notation 11<br />
Introduction <strong>et</strong> principaux résultats 13<br />
Principaux résultats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15<br />
Calibration <strong>de</strong> modèles expon<strong>en</strong>tielle-Lévy . . . . . . . . . . . . . . . . . . . . . . 17<br />
Modélisation multidim<strong>en</strong>sionnelle avec les processus <strong>de</strong> Lévy . . . . . . . . . . . . 22<br />
Introduction 27<br />
I Calibration of one-dim<strong>en</strong>sional exp-Lévy mo<strong>de</strong>ls 31<br />
1 Lévy processes and exp-Lévy mo<strong>de</strong>ls 33<br />
1.1 Lévy processes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33<br />
1.1.1 Stochastic expon<strong>en</strong>tial of Lévy processes . . . . . . . . . . . . . . . . . . . 36<br />
1.1.2 Change of measure and absolute continuity of Lévy processes . . . . . . . 38<br />
1.1.3 Tightness and converg<strong>en</strong>ce of sequ<strong>en</strong>ces of Lévy processes . . . . . . . . . 40<br />
1.2 Expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls: <strong>de</strong>finition and main properties . . . . . . . . . . . . . 41<br />
1.3 Expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls in finance . . . . . . . . . . . . . . . . . . . . . . . . . 43<br />
1.4 Pricing European options in exp-Lévy mo<strong>de</strong>ls via Fourier transform . . . . . . . 47<br />
2 The calibration problem and its regularization 57<br />
2.1 Least squares calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58<br />
2.1.1 Lack of i<strong>de</strong>ntification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60<br />
2.1.2 Exist<strong>en</strong>ce of solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62<br />
7
8 CONTENTS<br />
2.1.3 Continuity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66<br />
2.1.4 Numerical difficulties of least squares calibration . . . . . . . . . . . . . . 68<br />
2.2 Selection of solutions using relative <strong>en</strong>tropy . . . . . . . . . . . . . . . . . . . . . 69<br />
2.3 The use of relative <strong>en</strong>tropy for pricing and calibration: review of literature . . . . 72<br />
2.3.1 Pricing with minimal <strong>en</strong>tropy martingale measure . . . . . . . . . . . . . 72<br />
2.3.2 Calibration via relative <strong>en</strong>tropy minimization . . . . . . . . . . . . . . . . 75<br />
2.3.3 The pres<strong>en</strong>t study in the context of previous work on this subject . . . . 79<br />
2.4 Relative <strong>en</strong>tropy of Lévy processes . . . . . . . . . . . . . . . . . . . . . . . . . . 80<br />
2.4.1 Properties of the relative <strong>en</strong>tropy functional . . . . . . . . . . . . . . . . . 82<br />
2.5 Regularizing the calibration problem . . . . . . . . . . . . . . . . . . . . . . . . . 85<br />
2.5.1 Properties of regularized solutions . . . . . . . . . . . . . . . . . . . . . . 87<br />
2.5.2 Converg<strong>en</strong>ce of regularized solutions . . . . . . . . . . . . . . . . . . . . . 92<br />
3 Numerical implem<strong>en</strong>tation of the calibration algorithm 95<br />
3.1 Discr<strong>et</strong>izing the calibration problem . . . . . . . . . . . . . . . . . . . . . . . . . 96<br />
3.2 Choice of the prior Lévy process . . . . . . . . . . . . . . . . . . . . . . . . . . . 99<br />
3.3 Choice of the regularization param<strong>et</strong>er . . . . . . . . . . . . . . . . . . . . . . . . 102<br />
3.3.1 A posteriori param<strong>et</strong>er choice rules for attainable calibration problems . . 103<br />
3.3.2 A posteriori param<strong>et</strong>er choice rule for non-attainable calibration problems 110<br />
3.3.3 Computing the noise level . . . . . . . . . . . . . . . . . . . . . . . . . . . 111<br />
3.4 Choice of the weights of option prices . . . . . . . . . . . . . . . . . . . . . . . . 111<br />
3.5 Numerical solution of calibration problem . . . . . . . . . . . . . . . . . . . . . . 113<br />
3.5.1 Computing the calibration functional . . . . . . . . . . . . . . . . . . . . . 114<br />
3.5.2 Computing the gradi<strong>en</strong>t of the calibration functional . . . . . . . . . . . . 117<br />
3.5.3 Overview of the algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . 119<br />
3.6 Numerical and empirical tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119<br />
3.6.1 Tests on simulated data . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119<br />
3.6.2 Empirical properties of implied Lévy measures . . . . . . . . . . . . . . . 123<br />
3.6.3 Testing time homog<strong>en</strong>eity . . . . . . . . . . . . . . . . . . . . . . . . . . . 126
CONTENTS 9<br />
II Multidim<strong>en</strong>sional mo<strong>de</strong>lling with Lévy processes 131<br />
4 Characterization of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of multidim<strong>en</strong>sional Lévy processes 133<br />
4.1 Introduction to <strong>de</strong>p<strong>en</strong><strong>de</strong>nce mo<strong>de</strong>lling . . . . . . . . . . . . . . . . . . . . . . . . 133<br />
4.2 Dep<strong>en</strong><strong>de</strong>nce concepts for multidim<strong>en</strong>sional Lévy processes . . . . . . . . . . . . . 138<br />
4.3 Increasing functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141<br />
4.4 Lévy copulas for spectrally positive Lévy processes . . . . . . . . . . . . . . . . . 146<br />
4.5 Lévy copulas for g<strong>en</strong>eral Lévy processes . . . . . . . . . . . . . . . . . . . . . . . 152<br />
4.6 Examples of Lévy copulas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158<br />
5 Applications of Lévy copulas 165<br />
5.1 Param<strong>et</strong>ric families of Lévy copulas . . . . . . . . . . . . . . . . . . . . . . . . . . 167<br />
5.2 Simulation of multidim<strong>en</strong>sional <strong>de</strong>p<strong>en</strong><strong>de</strong>nt Lévy processes . . . . . . . . . . . . . 174<br />
5.3 A two-dim<strong>en</strong>sional variance gamma mo<strong>de</strong>l for option pricing . . . . . . . . . . . . 182<br />
Conclusions and perspectives 187<br />
Bibliography 189<br />
Subject in<strong>de</strong>x 199
Remarks on notation<br />
Basic notation<br />
the range of F .<br />
For a function F , Dom F and Ran F <strong>de</strong>note, respectively, the domain and<br />
δ x is a measure giv<strong>en</strong> by δ x (A) = 1 x∈A for every Borel s<strong>et</strong> A and λ| A is the restriction of<br />
the Lebesgue measure onto a Borel s<strong>et</strong> A.<br />
R d + <strong>de</strong>notes [0, ∞) d \ {0} and ¯R <strong>de</strong>notes the ext<strong>en</strong><strong>de</strong>d real line: ¯R := R ∪ {−∞} ∪ {∞}<br />
For two vectors a, b ∈ ¯R d , inequalities like a ≤ b should be interpr<strong>et</strong>ed as a i ≤ b i for<br />
i = 1, . . . , d. For any such vectors, [a, b) <strong>de</strong>notes a right-op<strong>en</strong> left-closed interval of ¯R d : [a, b) :=<br />
[a 1 , b 1 ) × · · · × [a d , b d ). Other types of intervals: (a, b], [a, b] and (a, b) are <strong>de</strong>fined similarly.<br />
Wh<strong>en</strong> we want to consi<strong>de</strong>r an interval as a s<strong>et</strong> of its vertices, without specifying wh<strong>et</strong>her the<br />
boundary is inclu<strong>de</strong>d, we will use the notation |a, b|. Finally, 〈a, b〉 <strong>de</strong>notes the scalar product<br />
of a and b.<br />
Measures and processes In this thesis, we fix a time horizon T ∞ < ∞ and Ω <strong>de</strong>notes the<br />
space of R d -valued càdlàg functions on [0, T ∞ ], equipped with the Skorokhod topology (see [54]).<br />
Unless otherwise m<strong>en</strong>tioned, X is the coordinate process: for every ω ∈ Ω, X t (ω) := ω(t). F is<br />
the smallest σ-field, for which the mappings ω ∈ Ω ↦→ ω(s) are measurable for all s ∈ [0, T ∞ ].<br />
For any t ∈ [0, T ∞ ], F t is the smallest σ-field, for which the mappings ω ∈ Ω ↦→ ω(s) are<br />
measurable for all s ∈ [0, t].<br />
For a semimartingale X, [X] <strong>de</strong>notes is quadratic variation and [X] c is the continuous part<br />
of [X].<br />
P(Ω) <strong>de</strong>notes the s<strong>et</strong> of all probability measures (stochastic processes) on (Ω, F). For two<br />
probability measures P, Q ∈ P(Ω), Q ≪ P means that Q is absolutely continuous with respect<br />
to P , that is, for every B ∈ F, P (B) = 0 implies Q(B) = 0.<br />
11
12<br />
For {P n } n≥1 , P ∈ P(Ω) the notation P n ⇒ P means that the sequ<strong>en</strong>ce {P n } n≥1 converges<br />
weakly to P , that is, for every continuous boun<strong>de</strong>d function f : Ω → R, P n (f) → P (f).<br />
The s<strong>et</strong> L consists of all probability measures P ∈ P(Ω), un<strong>de</strong>r which (X, P ) is a Lévy<br />
process.<br />
For a constant B > 0, L B and L + B<br />
<strong>de</strong>note the s<strong>et</strong>s of all probabilities P ∈ L such that (X, P )<br />
satisfies, P [|∆X t | ≤ B ∀t : 0 ≤ t ≤ T ∞ ] = 1 for L B (jumps are boun<strong>de</strong>d by B in absolute value)<br />
and P [∆X t ≤ B ∀t : 0 ≤ t ≤ T ∞ ] = 1 for L + B<br />
(jumps are boun<strong>de</strong>d by B from above).<br />
L NA is the s<strong>et</strong> of all probability measures P ∈ L corresponding to Lévy processes <strong>de</strong>scribing<br />
mark<strong>et</strong>s with no arbitrage opportunity, as <strong>de</strong>fined in Proposition 1.8.<br />
Finally, M stands for the s<strong>et</strong> of all probability measures P ∈ P(Ω), un<strong>de</strong>r which e Xt is a<br />
martingale.
Introduction <strong>et</strong> principaux résultats<br />
Un processus <strong>de</strong> Lévy est un processus stochastique aux accroissem<strong>en</strong>ts indép<strong>en</strong>dants <strong>et</strong> stationnaires:<br />
si {X t } t≥0 est un processus <strong>de</strong> Lévy, X t −X s avec t > s est indép<strong>en</strong>dant <strong>de</strong> l’histoire<br />
du processus avant le temps s <strong>et</strong> sa loi ne dép<strong>en</strong>d pas <strong>de</strong> t ou s séparém<strong>en</strong>t mais seulem<strong>en</strong>t<br />
<strong>de</strong> t − s. C<strong>et</strong>te propriété <strong>de</strong>s accroissem<strong>en</strong>ts évoque une analogie avec <strong>de</strong>s fonctions linéaires:<br />
on peut dire que les processus <strong>de</strong> Lévy sont, dans un certain s<strong>en</strong>s, <strong>de</strong>s “processus linéaires” ou<br />
additifs.<br />
Malgré c<strong>et</strong>te simplicité appar<strong>en</strong>te, les processus <strong>de</strong> Lévy ont <strong>de</strong>s nombreuses propriétés<br />
intéressantes <strong>et</strong> constitu<strong>en</strong>t un domaine d’étu<strong>de</strong> <strong>en</strong> plein développem<strong>en</strong>t: plusieurs ouvrages ont<br />
été publiés récemm<strong>en</strong>t [17, 87] <strong>et</strong> une série <strong>de</strong> confér<strong>en</strong>ces internationales dédiées aux processus<br />
<strong>de</strong> Lévy <strong>et</strong> applications a r<strong>en</strong>contré un grand succès [6].<br />
Sur le plan <strong>de</strong> modélisation financière, les processus <strong>de</strong> Lévy fourniss<strong>en</strong>t une classe <strong>de</strong><br />
modèles avec sauts qui est à la fois suffisamm<strong>en</strong>t riche pour bi<strong>en</strong> décrire les données empiriques<br />
<strong>et</strong> assez simple pour faire beaucoup <strong>de</strong> calculs analytiquem<strong>en</strong>t. L’intérêt <strong>de</strong> tels modèles <strong>en</strong><br />
finance est principalem<strong>en</strong>t dû aux trois facteurs suivants.<br />
Premièrem<strong>en</strong>t, dans un modèle aux trajectoires continues comme un modèle <strong>de</strong> diffusion,<br />
le processus <strong>de</strong> prix se comporte localem<strong>en</strong>t comme un mouvem<strong>en</strong>t browni<strong>en</strong> <strong>et</strong> la probabilité<br />
que le prix bouge beaucoup p<strong>en</strong>dant un temps court est très p<strong>et</strong>ite si la valeur <strong>de</strong> volatilité <strong>de</strong><br />
volatilité n’est pas déraisonnablem<strong>en</strong>t gran<strong>de</strong>. Cela implique que dans <strong>de</strong> tels modèles les prix<br />
<strong>de</strong>s options “hors <strong>de</strong> la monnaie” doiv<strong>en</strong>t être beaucoup plus p<strong>et</strong>its que ce que l’on observe<br />
<strong>en</strong> réalité. Par contre, si le processus <strong>de</strong> prix peut sauter, même pour une maturité courte on<br />
ne peut pas négliger la probabilité d’un mouvem<strong>en</strong>t inatt<strong>en</strong>du du prix qui déplacerait l’option<br />
dans la monnaie.<br />
Deuxièmem<strong>en</strong>t, du point <strong>de</strong> vue <strong>de</strong> la couverture, les modèles aux trajectoires continues<br />
13
14 INTRODUCTION EN FRANCAIS<br />
correspon<strong>de</strong>nt <strong>en</strong> général aux marchés compl<strong>et</strong>s ou aux marchés qui peuv<strong>en</strong>t être complétés<br />
<strong>en</strong> ajoutant un ou <strong>de</strong>ux actifs supplém<strong>en</strong>taires comme dans les modèles à volatilité stochastique.<br />
Ceci implique que le flux terminal <strong>de</strong> n’importe quel actif conting<strong>en</strong>t est parfaitem<strong>en</strong>t<br />
repliquable, <strong>et</strong> les options cotées <strong>de</strong>vi<strong>en</strong>n<strong>en</strong>t donc redondantes. Le “mystère” est facilem<strong>en</strong>t<br />
expliquée par la prés<strong>en</strong>ce <strong>de</strong> sauts dans les prix: <strong>en</strong> prés<strong>en</strong>ce <strong>de</strong> sauts la couverture parfaite est<br />
impossible <strong>et</strong> les options perm<strong>et</strong>t<strong>en</strong>t aux participants du marché <strong>de</strong> couvrir les risques qui ne<br />
sont pas repliquables par une stratégie <strong>de</strong> trading ne faisant interv<strong>en</strong>ir que le sous-jac<strong>en</strong>t.<br />
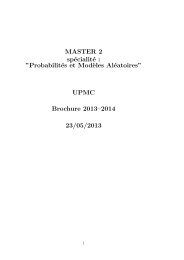
Le troisième argum<strong>en</strong>t <strong>en</strong> faveur <strong>de</strong> l’utilisation <strong>de</strong> modèles discontinus, qui est peut-être le<br />
plus fort, est la prés<strong>en</strong>ce-même <strong>de</strong> sauts dans les prix. Figure 1 <strong>de</strong> page 28 trace l’évolution<br />
du taux <strong>de</strong> change DM/USD p<strong>en</strong>dant une pério<strong>de</strong> <strong>de</strong> <strong>de</strong>ux semaines <strong>en</strong> 1992. Sur ce graphique<br />
il y a au moins trois <strong>en</strong>droits ou le taux a bougé <strong>de</strong> plus <strong>de</strong> 100 points <strong>de</strong> base <strong>en</strong> moins <strong>de</strong> 5<br />
minutes. Il est claire que <strong>de</strong>s variations <strong>de</strong> prix comme celles-là ne peuv<strong>en</strong>t pas être expliquées<br />
par un modèle aux trajectoires continues, mais elles doiv<strong>en</strong>t être prises <strong>en</strong> compte pour une<br />
gestion <strong>de</strong> risques fiable.<br />
Quand c<strong>et</strong> étu<strong>de</strong> a été comm<strong>en</strong>cé, plusieurs thèses <strong>de</strong> doctorat avai<strong>en</strong>t déjà été sout<strong>en</strong>ues [78,<br />
79, 81, 86, 96] <strong>et</strong> quelques c<strong>en</strong>taines d’articles avai<strong>en</strong>t été publiés dans le domaine <strong>de</strong> modélisation<br />
financière avec <strong>de</strong>s processus <strong>de</strong> Lévy. Cep<strong>en</strong>dant, <strong>de</strong>ux questions majeures, qui apparaiss<strong>en</strong>t<br />
dans le titre <strong>de</strong> c<strong>et</strong>te thèse étai<strong>en</strong>t restées ouvertes.<br />
Premièrem<strong>en</strong>t, alors que la piste <strong>de</strong> recherche, privilégiée dans la litterature, était le développem<strong>en</strong>t<br />
<strong>de</strong> métho<strong>de</strong>s efficaces <strong>de</strong> valorisation <strong>de</strong> produits dérivés dans les modèles expon<strong>en</strong>tielle-Lévy,<br />
une étape ess<strong>en</strong>tielle d’utilisation d’un tel modèle est <strong>de</strong> trouver les valuers <strong>de</strong>s<br />
paramètres, où, plus généralem<strong>en</strong>t, le tripl<strong>et</strong> caractéristique du processus <strong>de</strong> Lévy sous-jac<strong>en</strong>t,<br />
qui soit compatible avec les prix <strong>de</strong>s options cotées sur le marché financier. Ce problème,<br />
connu sous le nom du problème <strong>de</strong> calibration, est un problème inverse à celui <strong>de</strong> valorisation<br />
<strong>de</strong>s options europé<strong>en</strong>nes dans un modèle expon<strong>en</strong>tielle-Lévy <strong>et</strong> il est n<strong>et</strong>tem<strong>en</strong>t plus difficile à<br />
résoudre que ce <strong>de</strong>rnier. Le problème <strong>de</strong> calibration a été traité par plusieurs auteurs (cf. par<br />
exemple [4, 35, 53, 85]) dans le cadre d’un modèle <strong>de</strong> diffusion markovi<strong>en</strong>ne, où le paramètre<br />
inconnu est la fonction <strong>de</strong> volatilité locale σ(S t , t). Cep<strong>en</strong>dant, dans le contexte <strong>de</strong> processus<br />
avec sauts, bi<strong>en</strong> que plusieurs articles propos<strong>en</strong>t <strong>de</strong>s modèles paramétriques à base <strong>de</strong> processus<br />
<strong>de</strong> Lévy [5, 22, 36, 62, 67, 71], il n’existait pas, avant c<strong>et</strong> étu<strong>de</strong>, <strong>de</strong> métho<strong>de</strong> perm<strong>et</strong>tant d’<strong>en</strong><br />
choisir un parmi c<strong>et</strong>te multitu<strong>de</strong> <strong>de</strong> modèles ni d’algorithme stable <strong>de</strong> calibration <strong>de</strong> paramètres
INTRODUCTION EN FRANCAIS 15<br />
<strong>de</strong> tels modèles à partir <strong>de</strong> prix d’options europé<strong>en</strong>nes. Dans la première partie <strong>de</strong> la thèse je<br />
développe donc une métho<strong>de</strong> non-paramétrique robuste <strong>de</strong> calibration <strong>de</strong> modèles expon<strong>en</strong>tielle-<br />
Lévy, étudie ses propriétés <strong>de</strong> converg<strong>en</strong>ce <strong>et</strong> <strong>de</strong> stabilité, décris sa réalisation numérique <strong>et</strong><br />
donne <strong>de</strong>s exemples <strong>de</strong> son utilisation. Mon approche consiste à reformuler le problème <strong>de</strong><br />
calibration comme celui <strong>de</strong> trouver un processus <strong>de</strong> Lévy risque neutre qui reproduit les prix<br />
d’options cotées avec la plus gran<strong>de</strong> précision possible <strong>et</strong> qui a l’<strong>en</strong>tropie relative minimale par<br />
rapport à un processus a priori donné. Ce problème est alors résolu <strong>en</strong> utilisant la métho<strong>de</strong> <strong>de</strong><br />
régularisation, prov<strong>en</strong>ant <strong>de</strong> la théorie <strong>de</strong> problèmes inverses mal posés [40].<br />
Le <strong>de</strong>uxième problème, traité dans c<strong>et</strong>te thèse est celui <strong>de</strong> la modélisation multidim<strong>en</strong>sionnelle<br />
avec <strong>de</strong>s processus <strong>de</strong> Lévy. Alors que la plupart d’applications financières nécessit<strong>en</strong>t<br />
un modèle multidim<strong>en</strong>sionnel perm<strong>et</strong>tant <strong>de</strong> pr<strong>en</strong>dre <strong>en</strong> compte la dép<strong>en</strong>dance <strong>en</strong>tre les actifs,<br />
la quasi-totalité <strong>de</strong> modèles paramétriques disponibles dans la littérature ne s’appliqu<strong>en</strong>t<br />
qu’au cas d’un seul actif. Les <strong>de</strong>ux métho<strong>de</strong>s perm<strong>et</strong>tant <strong>de</strong> construire <strong>de</strong>s modèles multidim<strong>en</strong>sionnels<br />
à base <strong>de</strong> processus <strong>de</strong> Lévy que l’on trouve dans la littérature concern<strong>en</strong>t soit le<br />
cas d’un mouvem<strong>en</strong>t browni<strong>en</strong> multivarié changé <strong>de</strong> temps par un processus <strong>de</strong> Lévy croissant<br />
unidim<strong>en</strong>sionnel [79] soit le cas où toutes les composantes ont une int<strong>en</strong>sité finie <strong>de</strong> sauts [65].<br />
Dans les <strong>de</strong>ux cas, la gamme <strong>de</strong> structures <strong>de</strong> dép<strong>en</strong>dance que l’on peut obt<strong>en</strong>ir est très limitée.<br />
La <strong>de</strong>uxième partie <strong>de</strong> c<strong>et</strong>te thèse est alors consacrée au développem<strong>en</strong>t d’une méthodologie<br />
générale perm<strong>et</strong>tant <strong>de</strong> caractériser les structures <strong>de</strong> dép<strong>en</strong>dance <strong>en</strong>tre les composantes d’un<br />
processus <strong>de</strong> Lévy multidim<strong>en</strong>sionnel <strong>et</strong> <strong>de</strong> construire <strong>de</strong>s modèles multidim<strong>en</strong>sionnels à base<br />
<strong>de</strong> processus <strong>de</strong> Lévy. C<strong>et</strong> objectif est atteint grâce à l’introduction <strong>de</strong> la notion <strong>de</strong> copule <strong>de</strong><br />
Lévy, qui peut être considérée comme l’analogue pour les processus <strong>de</strong> Lévy <strong>de</strong> la notion <strong>de</strong><br />
copule, utilisée <strong>en</strong> statistique pour modéliser la dép<strong>en</strong>dance <strong>en</strong>tre les variables aléatoires réelles<br />
[56, 76].<br />
Principaux résultats<br />
Le premier chapitre <strong>de</strong> la thèse comm<strong>en</strong>ce par une brève prés<strong>en</strong>tation <strong>de</strong>s processus <strong>de</strong> Lévy,<br />
complétée d’un recueil <strong>de</strong> leurs principales propriétés, utilisées dans la suite <strong>de</strong> la thèse, <strong>et</strong> <strong>de</strong>s<br />
modèles exp-Lévy, c’est-à-dire, les modèles où le prix d’une action est décrit par l’expon<strong>en</strong>tielle<br />
d’un processus <strong>de</strong> Lévy. Dans la section suivante je passe <strong>en</strong> revue les différ<strong>en</strong>ts modèles exp-
16 INTRODUCTION EN FRANCAIS<br />
Lévy paramétriques, disponibles dans la littérature financière. La <strong>de</strong>rnière section <strong>de</strong> ce chapitre<br />
décrit une métho<strong>de</strong>, due à Carr <strong>et</strong> Madan [23], perm<strong>et</strong>tant <strong>de</strong> valoriser les options europé<strong>en</strong>nes<br />
dans les modèles exp-Lévy à l’ai<strong>de</strong> <strong>de</strong> la transformée <strong>de</strong> Fourier. La métho<strong>de</strong> est fondée sur<br />
l’observation suivante: si on soustrait du prix <strong>de</strong> l’option call sa valeur intrinsèque:<br />
z T (k) = e −rT E[(e rT +X T<br />
− e k ) + ] − (1 − e k−rT ) + ,<br />
alors la quantité qui reste est, sous certaines conditions, intégrable <strong>et</strong> on peut évaluer sa transformée<br />
<strong>de</strong> Fourier:<br />
ζ T (v) :=<br />
∫ +∞<br />
−∞<br />
e ivk z T (k)dk = e ivrT Φ T (v − i) − 1<br />
,<br />
iv(1 + iv)<br />
où Φ T est la fonction caractéristique <strong>de</strong> X T . Les prix d’options peuv<strong>en</strong>t donc être évalués <strong>en</strong><br />
calculant la transformée <strong>de</strong> Fourier inverse <strong>de</strong> ζ T .<br />
C<strong>et</strong>te section est la seule du premier chapitre à cont<strong>en</strong>ir <strong>de</strong>s résultats originaux. Premièrem<strong>en</strong>t,<br />
j’ai démontré qu’on peut diminuer considérablem<strong>en</strong>t l’erreur <strong>de</strong> troncature dans le calcul<br />
<strong>de</strong> la transformée <strong>de</strong> Fourier inverse <strong>en</strong> remplaçant la valeur intrinsèque <strong>de</strong> l’option par son prix<br />
dans le modèle <strong>de</strong> Black <strong>et</strong> Scholes: si on dénote<br />
˜z T (k) = e −rT E[(e rT +X T<br />
− e k ) + ] − C Σ BS(k),<br />
où CBS Σ (k) est le prix Black <strong>et</strong> Scholes d’une option call avec volatilité Σ <strong>et</strong> log-strike k, <strong>et</strong><br />
Φ Σ T (v) = exp(− Σ2 T<br />
2 (v2 + iv)), alors la transformée <strong>de</strong> Fourier <strong>de</strong> ˜z T (k) est donnée par<br />
˜ζ T (v) = e ivrT Φ T (v − i) − Φ Σ T<br />
(v − i)<br />
.<br />
iv(1 + iv)<br />
Pour presque tous les modèles paramétriques, discutés dans la littérature c<strong>et</strong>te quantité converge<br />
vers zéro plus vite que toute puissance <strong>de</strong> |v| lorsque |v| → ∞ (notons que ζ T (v) converge<br />
seulem<strong>en</strong>t comme |v| −2 ).<br />
Le <strong>de</strong>uxième apport <strong>de</strong> c<strong>et</strong>te section est le développem<strong>en</strong>t d’une métho<strong>de</strong> <strong>de</strong> contrôle d’erreur<br />
pour l’algorithme <strong>de</strong> Carr <strong>et</strong> Madan. Supposons que la transformée <strong>de</strong> Fourier inverse <strong>de</strong> ˜ζ T<br />
est approchée comme suit:<br />
∫<br />
1 ∞<br />
e −ivk ˜ζT (v)dv =<br />
2π −∞<br />
N−1<br />
L ∑<br />
2π(N − 1)<br />
m=0<br />
w m ˜ζT (v m )e −ikvm + ε T + ε D , (1)
INTRODUCTION EN FRANCAIS 17<br />
où ε T est l’erreur <strong>de</strong> troncature, ε D est l’erreur <strong>de</strong> discrétisation, v m = −L/2 + m∆, ∆ =<br />
L/(N − 1) est le pas <strong>de</strong> discrétisation <strong>et</strong> w m sont les poids qui correspon<strong>de</strong>nt à la métho<strong>de</strong><br />
d’intégration choisie. Alors, notant le tripl<strong>et</strong> caractéristique <strong>de</strong> X par (A, ν, γ), l’erreur <strong>de</strong><br />
troncature peut être évaluée comme suit:<br />
1. Si on suppose A > 0 alors l’erreur <strong>de</strong> troncature satisfait:<br />
|ε T | ≤<br />
8<br />
πT Σ 2 L 3 e− T L2 Σ 2 8<br />
8 +<br />
πT AL 3 e− T L2 A<br />
8<br />
2. Si on suppose que ν a une <strong>de</strong>nsité <strong>de</strong> la forme ν(x) = e−x<br />
|x|<br />
f(x), où f est une fonction<br />
croissante sur (−∞, 0) <strong>et</strong> décroissante sur (0, ∞) alors l’erreur <strong>de</strong> troncature satisfait:<br />
8<br />
|ε T | ≤<br />
πT Σ 2 L 3 e− T L2 Σ 2<br />
8 + |Φ T (L/2 − i)| + |Φ T (−L/2 − i)|<br />
.<br />
πL<br />
Si l’intégrale dans l’équation (1) est approchée <strong>en</strong> utilisant la métho<strong>de</strong> <strong>de</strong> trapèzes, l’erreur<br />
<strong>de</strong> discrétisation ε D satisfait<br />
|ε D | ≤ ∆2<br />
6π<br />
2∑<br />
l=0<br />
C 3−l + C Σ 3−l<br />
(3 − l)!<br />
×<br />
{ (<br />
∆ + π 2<br />
( √ )<br />
)<br />
e |k−rT | L L<br />
+ log<br />
2 + 2<br />
4 + 1<br />
}<br />
|k − rT | l<br />
,<br />
l!<br />
où<br />
⎧<br />
⎪⎨<br />
C k =<br />
⎪⎩<br />
|Φ (k)<br />
T<br />
(−i)|, k pair<br />
|Φ (k+1)<br />
T<br />
(−i)| k<br />
k+1 , k impair<br />
<strong>et</strong> C Σ k sont calculés <strong>en</strong> utilisant la même formule à partir <strong>de</strong> la fonction caractéristique ΦΣ T .<br />
Calibration <strong>de</strong> modèles expon<strong>en</strong>tielle-Lévy<br />
Le <strong>de</strong>uxième chapitre est consacré au traitem<strong>en</strong>t théorique du problème <strong>de</strong> calibration. Je<br />
comm<strong>en</strong>ce par discuter la calibration au s<strong>en</strong>s <strong>de</strong> moindres carrés linéaires, qui est la métho<strong>de</strong><br />
couramm<strong>en</strong>t utilisée par les pratici<strong>en</strong>s <strong>et</strong> chercheurs. Dans c<strong>et</strong>te approche, pour trouver une<br />
solution, on minimise la somme pondérée <strong>de</strong>s carrés <strong>de</strong>s écarts <strong>en</strong>tre les prix <strong>de</strong> marché <strong>et</strong> les<br />
prix du modèle:
18 INTRODUCTION EN FRANCAIS<br />
Calibration au s<strong>en</strong>s <strong>de</strong> moindres carrés non-linéaires.<br />
Etant donnés les prix C M <strong>de</strong>s<br />
options cotées sur le marché financier, trouver un modèle expon<strong>en</strong>tielle-Lévy risque neutre Q ∗ ,<br />
tel que<br />
‖C M − C Q∗ ‖ 2 w = inf<br />
Q ‖C M − C Q ‖ 2 w,<br />
où le inf est calculé sur tous les modèles expon<strong>en</strong>tielle-Lévy risque neutres, C Q dénote les prix<br />
calculés dans le modèle Q <strong>et</strong><br />
‖C M − C Q ‖ 2 w :=<br />
N∑<br />
w i (C M (T i , K i ) − C Q (T i , K i )) 2 .<br />
i=1<br />
L’<strong>en</strong>semble <strong>de</strong>s solutions du problème <strong>de</strong> calibration au s<strong>en</strong>s <strong>de</strong> moindres carrés sera noté<br />
Q LS . Je comm<strong>en</strong>ce par démontrer que dans le contexte <strong>de</strong> calibration non-paramétrique <strong>de</strong><br />
modèles exp-Lévy c<strong>et</strong>te métho<strong>de</strong> ne perm<strong>et</strong> pas toujours <strong>de</strong> trouver une solution <strong>et</strong> est, dans<br />
certaines situations, instable par rapport aux perturbations <strong>de</strong>s données d’<strong>en</strong>trée C M . Ensuite<br />
je donne <strong>de</strong>s conditions suffisantes (assez restrictives), sous lesquelles le problème <strong>de</strong> calibration<br />
adm<strong>et</strong> une solution continue par rapport aux données d’<strong>en</strong>trée (Théorème 2.1 <strong>et</strong> Proposition<br />
2.5). Comme ces conditions sont rarem<strong>en</strong>t vérifiées <strong>en</strong> pratique, il est nécessaire <strong>de</strong> trouver<br />
une métho<strong>de</strong> plus fiable <strong>de</strong> résolution du problème <strong>de</strong> calibration. Le premier pas dans c<strong>et</strong>te<br />
direction est <strong>de</strong> le reformuler comme le problème <strong>de</strong> trouver un processus <strong>de</strong> Lévy risque neutre<br />
qui reproduit les prix d’options cotées avec la plus gran<strong>de</strong> précision possible <strong>et</strong> qui a l’<strong>en</strong>tropie<br />
relative minimale par rapport à un processus a priori à donné parmi toutes les solutions du<br />
problème <strong>de</strong> calibration au s<strong>en</strong>s <strong>de</strong> moindres carrés:<br />
Calibration au s<strong>en</strong>s <strong>de</strong> moindres carrés avec minimisation d’<strong>en</strong>tropie<br />
Etant donnés<br />
les prix C M <strong>de</strong>s options cotées sur le marché financier, <strong>et</strong> un processus <strong>de</strong> Lévy a priori P ,<br />
trouver un modèle expon<strong>en</strong>tielle-Lévy risque neutre Q ∗ ∈ Q LS , tel que<br />
I(Q ∗ |P ) =<br />
inf I(Q|P ).<br />
Q∈QLS Les solutions du problème ci-<strong>de</strong>ssus seront appelées solutions au s<strong>en</strong>s <strong>de</strong> moindres carrés
INTRODUCTION EN FRANCAIS 19<br />
d’<strong>en</strong>tropie minimale. Le li<strong>en</strong> <strong>de</strong> c<strong>et</strong>te approche avec d’autres métho<strong>de</strong>s <strong>de</strong> calibration <strong>et</strong> <strong>de</strong><br />
valorisation d’options à l’ai<strong>de</strong> <strong>de</strong> l’<strong>en</strong>tropie relative, disponibles dans la littérature, est discuté<br />
dans section 2.3.<br />
C<strong>et</strong>te formulation résout le problème <strong>de</strong> non-i<strong>de</strong>ntifiabilité, mais souffre toujours <strong>de</strong> manque<br />
<strong>de</strong> stabilité. Cep<strong>en</strong>dant, elle peut être transformée <strong>en</strong> un problème <strong>de</strong> calibration stable <strong>et</strong><br />
adm<strong>et</strong>tant toujours une solution, <strong>en</strong> utilisant la métho<strong>de</strong> <strong>de</strong> régularisation, prov<strong>en</strong>ant <strong>de</strong> la<br />
théorie <strong>de</strong> problèmes inverses mal-posés. Pour régulariser le problème <strong>de</strong> calibration au s<strong>en</strong>s <strong>de</strong><br />
moindres carrés, je propose <strong>de</strong> minimiser la somme <strong>de</strong> l’erreur <strong>de</strong> valorisation <strong>et</strong> d’un terme <strong>de</strong><br />
pénalisation donné par l’<strong>en</strong>tropie relative du modèle par rapport à P :<br />
Problème <strong>de</strong> calibration régularisé Etant donnés les prix C M <strong>de</strong>s options cotées sur<br />
le marché <strong>et</strong> un processus <strong>de</strong> Lévy a priori P , trouver un modèle expon<strong>en</strong>tielle-Lévy risque<br />
neutre Q ∗ , tel que<br />
J α (Q ∗ ) = inf<br />
Q J α(Q),<br />
où le inf est calculé sur tous les modèles expon<strong>en</strong>tielle-Lévy risque neutres,<br />
J α (Q) = ‖C M − C Q ‖ 2 w + αI(Q|P )<br />
<strong>et</strong> α est le paramètre <strong>de</strong> régularisation qui détermine l’int<strong>en</strong>sité <strong>de</strong> pénalisation.<br />
Dans le cadre <strong>de</strong> processus <strong>de</strong> Lévy, l’<strong>en</strong>tropie relative peut être calculée explicitem<strong>en</strong>t<br />
(Théorème 2.9):<br />
I(Q|P ) = I(Q| FT∞ |P | FT∞ ) = T { ∫ 1<br />
2<br />
∞<br />
γ Q − γ P − x(ν Q − ν )(dx)} P 1 A≠0 +<br />
2A<br />
−1<br />
∫ ∞<br />
( )<br />
dν<br />
Q<br />
dνQ<br />
T ∞ log<br />
dνP dν P + 1 − dνQ<br />
dν P ν P (dx).<br />
C<strong>et</strong>te formule perm<strong>et</strong> d’étudier les propriétés <strong>de</strong> solutions du problème <strong>de</strong> calibration régularisé<br />
<strong>et</strong> démontrer les résultats suivants, sous condition que les sauts du processus a priori P sont<br />
bornés supérieurem<strong>en</strong>t par une constante B <strong>et</strong> que P correspond à un modèle expon<strong>en</strong>tielle-Lévy<br />
sans opportunité d’arbitrage<br />
−∞<br />
• Le problème <strong>de</strong> calibration régularisé adm<strong>et</strong> au moins une solution.
20 INTRODUCTION EN FRANCAIS<br />
• Si P satisfait une condition <strong>de</strong> régularité supplém<strong>en</strong>taire (2.28), alors la solution Q est une<br />
mesure équival<strong>en</strong>te à P (<strong>en</strong> général, Q est une mesure martingale, absolum<strong>en</strong>t continue<br />
par rapport à P ).<br />
• Les solutions du problème <strong>de</strong> calibration régularisé sont continues par rapport aux données<br />
<strong>de</strong> marché: si {C n M } n≥1 est une suite <strong>de</strong> données telle que ‖C n M − C M‖ w → 0, <strong>et</strong> pour<br />
chaque n, Q n est la solution du problème <strong>de</strong> calibration régularisé avec donnée C n M , loi<br />
a priori P <strong>et</strong> paramètre <strong>de</strong> régularisation α, alors {Q n } n≥1 a une sous-suite faiblem<strong>en</strong>t<br />
converg<strong>en</strong>te, <strong>et</strong> la limite <strong>de</strong> chaque sous-suite faiblem<strong>en</strong>t converg<strong>en</strong>te <strong>de</strong> {Q n } n≥1 est la<br />
solution du problème <strong>de</strong> calibration régularisé avec donnée C M , loi a priori P <strong>et</strong> paramètre<br />
<strong>de</strong> régularisation α.<br />
• Lorsque le niveau d’erreur dans les données <strong>de</strong> marché t<strong>en</strong>d vers 0, si le paramètre <strong>de</strong><br />
régularisation α est choisi <strong>de</strong> façon appropriée, alors les solutions du problème régularisé<br />
converg<strong>en</strong>t vers les solutions au s<strong>en</strong>s <strong>de</strong> moindres carrés d’<strong>en</strong>tropie minimale (lorsqu’il<br />
existe plusieurs solutions au s<strong>en</strong>s <strong>de</strong> moindres carrés d’<strong>en</strong>tropie minimale, la converg<strong>en</strong>ce<br />
est <strong>en</strong>t<strong>en</strong>due dans le même s<strong>en</strong>s que ci-<strong>de</strong>ssus).<br />
Le troisième chapitre traite la résolution numérique du problème <strong>de</strong> calibration régularisé,<br />
construit au chapitre précé<strong>de</strong>nt. Tout d’abord, pour se ram<strong>en</strong>er dans un espace fini-dim<strong>en</strong>sionnel,<br />
la mesure <strong>de</strong> Lévy du processus a priori P est discrétisée sur une grille:<br />
ν P =<br />
M−1<br />
∑<br />
k=0<br />
p k δ {xk }(dx), (2)<br />
ce qui implique que la mesure <strong>de</strong> Lévy <strong>de</strong> la solution Q a la même forme:<br />
ν Q =<br />
M−1<br />
∑<br />
k=0<br />
q k δ {xk }(dx).<br />
Ensuite, je démontre que la solution du problème <strong>de</strong> calibration avec une loi a priori quelconque<br />
peut être approchée avec une précision arbitraire par une suite <strong>de</strong> solutions avec lois a priori <strong>de</strong><br />
la forme (2) (théorème 3.2 <strong>et</strong> lemme 3.1). Section 3.2 discute le choix du processus a priori <strong>et</strong><br />
estime son influ<strong>en</strong>ce sur la solution, <strong>en</strong> effectuant <strong>de</strong>s tests numériques. La conclusion <strong>de</strong> c<strong>et</strong>te<br />
section est que la solution est peu s<strong>en</strong>sible aux p<strong>et</strong>ites variations du processus a priori, mais<br />
qu’il est important <strong>de</strong> spécifier sa forme qualitative correctem<strong>en</strong>t.
INTRODUCTION EN FRANCAIS 21<br />
Section 3.3 prés<strong>en</strong>te un algorithme <strong>de</strong> choix du paramètre <strong>de</strong> régularisation α “a posteriori” à<br />
partir <strong>de</strong>s données. Ma métho<strong>de</strong>, qui est une adaptation du principe <strong>de</strong> discrépance, développé<br />
par Morozov [74] pour la régularisation <strong>de</strong> Tikhonov dans les espaces <strong>de</strong> Banach, consiste à<br />
choisir <strong>de</strong>ux constantes c 1 <strong>et</strong> c 2 proches <strong>de</strong> 1, telles que 1 < c 1 < c 2 <strong>et</strong> trouver la valeur <strong>de</strong><br />
paramètre α pour laquelle c 1 δ 2 ≤ ε δ (α) ≤ c 2 δ 2 , où δ est le niveau <strong>de</strong> bruit dans les données <strong>et</strong><br />
la discrépance ε δ (α) est définie par<br />
ε δ (α) := ‖C Qδ α<br />
− CM‖ δ 2 ,<br />
avec Q δ α la solution du problème régularisé avec paramètre <strong>de</strong> régularisation α <strong>et</strong> niveau <strong>de</strong><br />
bruit δ.<br />
Section 3.5 est consacrée à l’algorithme numérique perm<strong>et</strong>tant <strong>de</strong> résoudre le problème <strong>de</strong><br />
calibration discrétisé, une fois que le processus a priori <strong>et</strong> le paramètre <strong>de</strong> régularisation ont<br />
été choisis. Le problème est résolu <strong>en</strong> minimisant la fonctionnelle <strong>de</strong> calibration approchée<br />
Ĵ α (Q) par la métho<strong>de</strong> BFGS, faisant interv<strong>en</strong>ir le gradi<strong>en</strong>t <strong>de</strong> la fonctionnelle à minimiser. La<br />
fonctionnelle approchée est donnée par<br />
Ĵ α (Q) =<br />
N∑<br />
w i (ĈQ (T i , K i ) − C M (T i , K i )) 2<br />
i=1<br />
⎛<br />
⎞<br />
+ α ⎝ A M−1<br />
2A 2 + ∑<br />
bP + (e x j<br />
− 1)q j<br />
⎠<br />
j=0<br />
2<br />
M−1<br />
∑<br />
+ α (q j log(q j /p j ) + 1 − q j ) ,<br />
j=0<br />
où ĈQ (T i , K i ) est l’approximation du prix d’une option call avec maturité T i <strong>et</strong> prix d’exercice<br />
K i , calculée dans le modèle Q <strong>en</strong> utilisant la métho<strong>de</strong> <strong>de</strong> transformée <strong>de</strong> Fourier. Le gradi<strong>en</strong>t<br />
<strong>de</strong> la fonctionnelle <strong>de</strong> calibration est évalué analytiquem<strong>en</strong>t <strong>en</strong> utilisant l’équation (3.32).<br />
Dans section 3.6 l’algorithme est appliqué d’abord aux données simulées (à partir d’un<br />
modèle exp-Lévy avec une mesure <strong>de</strong> Lévy connue) <strong>et</strong> <strong>en</strong>suite aux données réelles. Les tests<br />
sur <strong>de</strong>s données artificielles m<strong>et</strong>t<strong>en</strong>t <strong>en</strong> évi<strong>de</strong>nce la stabilité <strong>de</strong> l’algorithme <strong>et</strong> sa capacité <strong>de</strong><br />
reconstruire la vraie mesure <strong>de</strong> Lévy partout sauf dans un p<strong>et</strong>it voisinage <strong>de</strong> 0 (parce que les<br />
sauts <strong>de</strong> taille 0 n’ont pas d’influ<strong>en</strong>ce sur les prix d’options). Les tests sur les données réelles<br />
perm<strong>et</strong>t<strong>en</strong>t <strong>de</strong> tirer un nombre <strong>de</strong> conclusions importantes.<br />
- Premièrem<strong>en</strong>t, un modèle exp-Lévy perm<strong>et</strong> <strong>de</strong> calibrer <strong>de</strong>s prix d’options d’une seule<br />
maturité avec une gran<strong>de</strong> précision. C<strong>et</strong>te conclusion contredit les résultats <strong>de</strong> Medve<strong>de</strong>v
22 INTRODUCTION EN FRANCAIS<br />
<strong>et</strong> Scaill<strong>et</strong> [70] qui ont observé que “les sauts dans les prix ne perm<strong>et</strong>t<strong>en</strong>t pas d’expliquer<br />
la p<strong>en</strong>te <strong>de</strong> volatilité implicite à la monnaie”. Toutefois, il est important <strong>de</strong> remarquer<br />
que l’étu<strong>de</strong> <strong>de</strong> Medve<strong>de</strong>v <strong>et</strong> Scaill<strong>et</strong> porte sur les options sur l’indice S&P 500 <strong>de</strong> courte<br />
maturité, tandis que les tests <strong>de</strong> c<strong>et</strong>te thèse ont été effectués <strong>en</strong> utilisant les options sur<br />
l’indice DAX.<br />
- De plus, la qualité <strong>de</strong> calibration est déjà excell<strong>en</strong>te <strong>en</strong> utilisant seulem<strong>en</strong>t <strong>de</strong>s modèles à int<strong>en</strong>sité<br />
finie <strong>de</strong> sauts, ce qui rem<strong>et</strong> <strong>en</strong> question la nécessité, du point <strong>de</strong> vue <strong>de</strong> modélisation<br />
du smile <strong>de</strong> volatilité, <strong>de</strong>s modèles plus compliqués à int<strong>en</strong>sité infinie.<br />
- La troisième conclusion est que même dans le cadre non-paramétrique, il est impossible,<br />
<strong>en</strong> utilisant un modèle exp-Lévy, <strong>de</strong> calibrer <strong>de</strong>s prix d’options <strong>de</strong> plusieurs maturités<br />
avec une précision satisfaisante. Les tests ont donc confirmé l’observation déjà faite par<br />
certains auteurs [13, 68] que le cadre <strong>de</strong> modèles exp-Lévy est trop rigi<strong>de</strong> pour pouvoir<br />
décrire correctem<strong>en</strong>t la structure par terme <strong>de</strong> volatilités implicites.<br />
Modélisation multidim<strong>en</strong>sionnelle avec les processus <strong>de</strong> Lévy<br />
Le quatrième chapitre comm<strong>en</strong>ce par une revue <strong>de</strong> <strong>de</strong>ux métho<strong>de</strong>s, disponibles dans la littérature,<br />
perm<strong>et</strong>tant <strong>de</strong> construire <strong>de</strong>s modèles multidim<strong>en</strong>sionnels à base <strong>de</strong> processus <strong>de</strong> Lévy. Dans la<br />
première approche il s’agit <strong>de</strong> changer l’échelle <strong>de</strong> temps d’un mouvem<strong>en</strong>t browni<strong>en</strong> multivarié<br />
par un processus <strong>de</strong> Lévy croissant, le même pour toutes les composantes [79], <strong>et</strong> la <strong>de</strong>uxième<br />
métho<strong>de</strong>, qui ne concerne que le cas <strong>de</strong> processus <strong>de</strong> Lévy à int<strong>en</strong>sité finie <strong>de</strong> sauts, consiste à<br />
modéliser directem<strong>en</strong>t la dép<strong>en</strong>dance <strong>en</strong>tre les tailles <strong>de</strong>s sauts dans les différ<strong>en</strong>tes composantes,<br />
<strong>en</strong> utilisant les copules. Malheureusem<strong>en</strong>t, dans ces métho<strong>de</strong>s la gamme <strong>de</strong> types <strong>de</strong> dép<strong>en</strong>dance<br />
possibles est très limitée <strong>et</strong> <strong>de</strong>s contraintes sont imposées sur le choix <strong>de</strong> modèles paramétriques<br />
pour les composantes (on ne peut pas coupler <strong>de</strong>s composantes quelconques). La discussion<br />
<strong>de</strong>s défauts <strong>de</strong> ces métho<strong>de</strong>s perm<strong>et</strong> d’établir une liste <strong>de</strong> conditions qu’une bonne métho<strong>de</strong> <strong>de</strong><br />
modélisation multidim<strong>en</strong>sionnelle doit satisfaire:<br />
• On doit pouvoir choisir librem<strong>en</strong>t un processus <strong>de</strong> Lévy unidim<strong>en</strong>sionnel pour chacune <strong>de</strong><br />
composantes.
INTRODUCTION EN FRANCAIS 23<br />
• La gamme <strong>de</strong> structures <strong>de</strong> dép<strong>en</strong>dance possibles doit inclure l’indép<strong>en</strong>dance <strong>et</strong> la dép<strong>en</strong>dance<br />
complète avec une transition continue <strong>en</strong>tre ces <strong>de</strong>ux cas extrêmes.<br />
• La métho<strong>de</strong> doit perm<strong>et</strong>tre <strong>de</strong> construire <strong>de</strong>s modèles <strong>de</strong> dép<strong>en</strong>dance paramétriques.<br />
Pour atteindre ces conditions, je propose <strong>de</strong> séparer la structure <strong>de</strong> dép<strong>en</strong>dance d’un processus<br />
<strong>de</strong> Lévy <strong>de</strong>s lois marginales <strong>de</strong> ces composantes. Dans le cadre plus restreint <strong>de</strong> variables<br />
aléatoires à valeurs dans R d , c<strong>et</strong>te séparation est réalisée par la notion <strong>de</strong> copule. Je développe<br />
une notion analogue, applicable au cas <strong>de</strong>s processus <strong>de</strong> Lévy.<br />
Section 4.4 introduit les copules <strong>de</strong> Lévy dans le cas plus simple <strong>de</strong> processus <strong>de</strong> Lévy<br />
n’adm<strong>et</strong>tant que <strong>de</strong>s sauts positifs dans chacune <strong>de</strong> composantes. Dans ce cas la copule <strong>de</strong><br />
Lévy est définie comme une fonction F : [0, ∞] d → [0, ∞] avec les propriétés suivantes:<br />
1. F (u 1 , . . . , u d ) = 0 dès que u i = 0 pour au moins un i ∈ {1, . . . , d},<br />
2. F est une fonction croissante <strong>en</strong> d dim<strong>en</strong>sions, c.-à-d., pour tout a, b ∈ Dom F ,<br />
∑<br />
(−1) N(c) F (c) ≥ 0,<br />
où la somme est calculé sur tous les somm<strong>et</strong>s c <strong>de</strong> [a, b] <strong>et</strong> N(c) := #{k : c k = a k }.<br />
3. F a les fonctions marginales uniformes: F (u 1 , . . . , u d )| ui =∞,i≠k = u k pour tout k ∈<br />
{1, . . . , d}, u k ∈ [0, ∞].<br />
En représ<strong>en</strong>tant une mesure <strong>de</strong> Lévy ν sur R d + par son intégrale <strong>de</strong> queue:<br />
U(x 1 , . . . , x d ) = ν([x 1 , ∞) × · · · × [x d , ∞)),<br />
je démontre que<br />
• Pour toute mesure <strong>de</strong> Lévy ν sur R d + ayant l’intégrale <strong>de</strong> queue U <strong>et</strong> les mesures <strong>de</strong> Lévy<br />
marginales ν 1 , . . . , ν d , il existe une copule <strong>de</strong> Lévy F sur [0, ∞] d , telle que<br />
U(x 1 , . . . , x d ) = F (U 1 (x 1 ), . . . , U d (x d )), (x 1 , . . . , x d ) ∈ [0, ∞) d , (3)<br />
où U 1 , . . . , U d sont <strong>de</strong>s intégrales <strong>de</strong> queue <strong>de</strong> ν 1 , . . . , ν d .<br />
• Si F est une copule <strong>de</strong> Lévy sur [0, ∞] d <strong>et</strong> ν 1 , . . . , ν d sont <strong>de</strong>s mesures <strong>de</strong> Lévy sur (0, ∞)<br />
avec les intégrales <strong>de</strong> queue U 1 , . . . , U d , alors équation (3) définit une intégrale <strong>de</strong> queue<br />
d’une mesure <strong>de</strong> Lévy sur R d + ayant les mesures <strong>de</strong> Lévy marginales ν 1 , . . . , ν d .
24 INTRODUCTION EN FRANCAIS<br />
Ce résultat montre que pour chaque processus <strong>de</strong> Lévy il existe une copule <strong>de</strong> Lévy qui décrit<br />
sa structure <strong>de</strong> dép<strong>en</strong>dance, <strong>et</strong> que pour chaque copule <strong>de</strong> Lévy <strong>et</strong> chaque combinaison <strong>de</strong> lois<br />
unidim<strong>en</strong>sionnelles il existe un processus <strong>de</strong> Lévy avec <strong>de</strong>s lois <strong>de</strong> composantes données <strong>et</strong> dont<br />
la dép<strong>en</strong>dance est décrite par c<strong>et</strong>te copule <strong>de</strong> Lévy.<br />
Section 4.5 ét<strong>en</strong>d la notion <strong>de</strong> copule <strong>de</strong> Lévy <strong>et</strong> les résultats associés aux processus <strong>de</strong> Lévy<br />
généraux. Les résultats <strong>de</strong> c<strong>et</strong>te section ont été obt<strong>en</strong>us dans un travail joint avec Jan Kalls<strong>en</strong><br />
[59]. En particulier, la structure <strong>de</strong> dép<strong>en</strong>dance d’un processus <strong>de</strong> Lévy général est caractérisé<br />
par une copule <strong>de</strong> Lévy sur (−∞, ∞] d , c.-à-d., une fonction F : (−∞, ∞] d → (−∞, ∞] avec les<br />
propriétés suivantes:<br />
1. F (u 1 , . . . , u d ) < ∞ si (u 1 , . . . , u d ) ≠ (∞, . . . , ∞),<br />
2. F (u 1 , . . . , u d ) = 0 si u i = 0 pour au moins un i ∈ {1, . . . , d},<br />
3. F est une fonction croissante <strong>en</strong> d dim<strong>en</strong>sions,<br />
4. F a les fonctions marginales uniformes: pour tout k ∈ {1, . . . , d} <strong>et</strong> pour tout x k ∈<br />
(−∞, ∞],<br />
lim<br />
c→∞<br />
∑<br />
sgn x j = x k .<br />
(x j ) j≠k ∈{−c,∞} d−1 F (x 1 , . . . , x d ) ∏ j≠k<br />
Dans la <strong>de</strong>rnière section <strong>de</strong> ce chapitre je calcule les copules <strong>de</strong> Lévy qui correspon<strong>de</strong>nt aux<br />
types <strong>de</strong> dép<strong>en</strong>dance particuliers. Les composantes d’un processus <strong>de</strong> Lévy multidim<strong>en</strong>sionnel<br />
sans partie martingale continue sont indép<strong>en</strong>dantes si <strong>et</strong> seulem<strong>en</strong>t s’il a une copule <strong>de</strong> Lévy<br />
suivante:<br />
d∑ ∏<br />
F ⊥ (x 1 , . . . , x d ) := x i 1 {∞} (x j ).<br />
i=1 j≠i<br />
Les sauts d’un processus <strong>de</strong> Lévy d-dim<strong>en</strong>sionnel sont dits complètem<strong>en</strong>t dép<strong>en</strong>dants s’il existe<br />
un sous-<strong>en</strong>semble strictem<strong>en</strong>t ordonné S <strong>de</strong> K := {x ∈ R d : sgn x 1 = · · · = sgn x d }, tel que<br />
∆X t := X t − X t− ∈ S, t ≥ 0. La copule <strong>de</strong> Lévy <strong>de</strong> la dép<strong>en</strong>dance complète est<br />
d∏<br />
F ‖ (x 1 , . . . , x d ) := min(|x 1 |, . . . , |x d |)1 K (x 1 , . . . , x d ) sgn x i .<br />
Le <strong>de</strong>rnier chapitre <strong>de</strong> la thèse est dédié aux applications <strong>de</strong> copules <strong>de</strong> Lévy <strong>en</strong> finance.<br />
Dans les applications on n’a souv<strong>en</strong>t pas assez d’information sur la dép<strong>en</strong>dance pour employer<br />
i=1
INTRODUCTION EN FRANCAIS 25<br />
<strong>de</strong>s métho<strong>de</strong>s non-paramétriques <strong>et</strong> je comm<strong>en</strong>ce donc par donner <strong>de</strong>s outils perm<strong>et</strong>tant <strong>de</strong><br />
construire <strong>de</strong>s familles paramétriques <strong>de</strong> copules <strong>de</strong> Lévy. Un exemple <strong>de</strong> famille <strong>de</strong> copules <strong>de</strong><br />
Lévy <strong>en</strong> <strong>de</strong>ux dim<strong>en</strong>sions, dép<strong>en</strong>dant <strong>de</strong> <strong>de</strong>ux paramètres est donné par<br />
F (u, v) = (|u| −θ + |v| −θ ) −1/θ (η1 uv≥0 − (1 − η)1 uv
26 INTRODUCTION EN FRANCAIS<br />
dans un tel modèle <strong>en</strong> utilisant la métho<strong>de</strong> <strong>de</strong> Monte Carlo. Pour estimer l’importance <strong>de</strong> la<br />
dép<strong>en</strong>dance dans les queues <strong>de</strong> distribution pour la valorisation <strong>de</strong>s options, je pr<strong>en</strong>ds <strong>de</strong>ux jeux<br />
<strong>de</strong> paramètres η <strong>et</strong> θ, qui correspon<strong>de</strong>nt tous les <strong>de</strong>ux à la corrélation <strong>de</strong> r<strong>en</strong><strong>de</strong>m<strong>en</strong>ts <strong>de</strong> 50%<br />
mais ont les structures <strong>de</strong> dép<strong>en</strong>dance différ<strong>en</strong>tes. Les prix <strong>de</strong>s options sur panier pour les <strong>de</strong>ux<br />
jeux <strong>de</strong> paramètres diffèr<strong>en</strong>t <strong>de</strong> 10% à la monnaie, ce qui montre que la dép<strong>en</strong>dance dans les<br />
queues <strong>de</strong> distribution est importante à pr<strong>en</strong>dre <strong>en</strong> compte pour la valorisation d’options sur<br />
panier, <strong>et</strong> que les copules <strong>de</strong> Lévy sont un outil adapté pour décrire c<strong>et</strong>te dép<strong>en</strong>dance.
Introduction<br />
Lévy processes are <strong>de</strong>fined as stochastic processes with stationary and in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt increm<strong>en</strong>ts:<br />
if {X t } t≥0 is a Lévy process, th<strong>en</strong> X t −X s with t > s is in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt of the history of the process<br />
up to time s, and its law only <strong>de</strong>p<strong>en</strong>ds on t − s but not on t or s separately. This property of<br />
increm<strong>en</strong>ts suggests an analogy with linear functions: one can say that Lévy processes are, in<br />
some s<strong>en</strong>se, “linear processes”.<br />
Despite this appar<strong>en</strong>t simplicity, Lévy processes have many interesting properties and constitute<br />
an exciting field of study: this is shown by the rec<strong>en</strong>t publication of several monographs<br />
(see for example [17, 87]) and by the success of the series of international confer<strong>en</strong>ces on Lévy<br />
processes and applications (see [6]).<br />
From the point of view of financial mo<strong>de</strong>lling, Lévy processes provi<strong>de</strong> a class of mo<strong>de</strong>ls<br />
with jumps that is both suffici<strong>en</strong>tly rich to reproduce empirical data and simple <strong>en</strong>ough to do<br />
many computations analytically. The interest of jump mo<strong>de</strong>ls in finance is mainly due to three<br />
reasons.<br />
First, in a mo<strong>de</strong>l with continuous paths like a diffusion mo<strong>de</strong>l, the price process behaves<br />
locally like a Brownian motion and the probability that the stock moves by a large amount<br />
over a short period of time is very small, unless one fixes an unrealistically high value of the<br />
volatility of volatility. Therefore, in such mo<strong>de</strong>ls the prices of short term out of the money<br />
options should be much lower than what one observes in real mark<strong>et</strong>s. On the other hand,<br />
if stock prices are allowed to jump, ev<strong>en</strong> wh<strong>en</strong> the time to maturity is very short, there is a<br />
non-negligible probability that after a sud<strong>de</strong>n change in the stock price the option will move in<br />
the money.<br />
Second, from the hedging point of view, continuous mo<strong>de</strong>ls of stock price behavior g<strong>en</strong>erally<br />
lead to a compl<strong>et</strong>e mark<strong>et</strong> or to a mark<strong>et</strong> that can be ma<strong>de</strong> compl<strong>et</strong>e by adding one or two<br />
27
28 INTRODUCTION<br />
7500<br />
Taux <strong>de</strong> change DM/USD<br />
7400<br />
7300<br />
7200<br />
7100<br />
7000<br />
17/09/1992 2/10/1992<br />
Figure 1: Jumps in the trajectory of DM/USD exchange rate, sampled at 5-minute intervals.<br />
additional instrum<strong>en</strong>ts, like in stochastic volatility mo<strong>de</strong>ls. Since in such a mark<strong>et</strong> every terminal<br />
payoff can be exactly replicated, the very exist<strong>en</strong>ce of tra<strong>de</strong>d options becomes a puzzle. The<br />
mystery is easily solved by allowing for discontinuities: in real mark<strong>et</strong>s, due to the pres<strong>en</strong>ce of<br />
jumps in the prices, perfect hedging is impossible and options <strong>en</strong>able the mark<strong>et</strong> participants<br />
to hedge risks that cannot be hedged by using the un<strong>de</strong>rlying only.<br />
The third and the strongest argum<strong>en</strong>t for using discontinuous mo<strong>de</strong>ls is simply the pres<strong>en</strong>ce<br />
of jumps in observed prices. Figure 1 <strong>de</strong>picts the evolution of the DM/USD exchange rate over<br />
a two-week period in 1992, and one can see at least three points where the rate moved by over<br />
100 bp within a 5-minute period. Price moves like these ones clearly cannot be accounted for<br />
in the framework of a diffusion mo<strong>de</strong>l with continuous paths, but they must be <strong>de</strong>alt with if<br />
the mark<strong>et</strong> risk is to be measured and managed correctly.<br />
Although wh<strong>en</strong> this thesis was started, the field of financial mo<strong>de</strong>lling with Lévy processes<br />
was already a well-<strong>de</strong>veloped one, with several Ph. D. theses [78, 79, 81, 86, 96] and a few hundred<br />
research papers (see refer<strong>en</strong>ces in [27]) already writt<strong>en</strong> on the subject, two major issues, that<br />
appear in the title of the pres<strong>en</strong>t study, remained unresolved.<br />
First, while the main concern in the literature has be<strong>en</strong> to find effici<strong>en</strong>t analytical and<br />
numerical procedures for computing option prices in expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls, an ess<strong>en</strong>tial<br />
step in using such mo<strong>de</strong>ls is to obtain the param<strong>et</strong>ers — here the characteristic tripl<strong>et</strong> of the
INTRODUCTION 29<br />
un<strong>de</strong>rlying Lévy process — consist<strong>en</strong>t with the mark<strong>et</strong>-quoted prices of tra<strong>de</strong>d options. This<br />
problem — called mo<strong>de</strong>l calibration — is an inverse problem to that of pricing a European option<br />
in an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l and is much more difficult to solve than the latter. The calibration<br />
problem was addressed by several authors (see for example [4, 35, 53, 85]) in the framework of a<br />
markovian diffusion mo<strong>de</strong>l, the unknown param<strong>et</strong>er being the local volatility function σ(S t , t).<br />
However, in the s<strong>et</strong>ting of processes with jumps, although many papers proposed param<strong>et</strong>ric<br />
Lévy-based mo<strong>de</strong>ls [5, 22, 36, 62, 67, 71], prior to this study there existed no systematic approach<br />
to mo<strong>de</strong>l selection, and no stable calibration m<strong>et</strong>hod, that could be implem<strong>en</strong>ted in practice<br />
was available. In the first part of the thesis we <strong>de</strong>velop a non-param<strong>et</strong>ric m<strong>et</strong>hod allowing to<br />
calibrate expon<strong>en</strong>tial-Lévy mo<strong>de</strong>ls, study its stability and converg<strong>en</strong>ce properties, <strong>de</strong>scribe its<br />
numerical implem<strong>en</strong>tation and give examples of its use. Our approach is first to reformulate the<br />
calibration problem as that of finding a risk-neutral expon<strong>en</strong>tial Lévy mo<strong>de</strong>l that reproduces<br />
the observed option prices with the best possible precision and has the smallest relative <strong>en</strong>tropy<br />
with respect to a giv<strong>en</strong> prior, and th<strong>en</strong> to solve this problem via the regularization approach,<br />
used in the theory of ill-posed inverse problems [40].<br />
The second issue, addressed in this thesis, is that of multidim<strong>en</strong>sional mo<strong>de</strong>lling with Lévy<br />
process. Although most financial applications (bask<strong>et</strong> option pricing, risk managem<strong>en</strong>t, portfolio<br />
optimization <strong>et</strong>c.) require a multidim<strong>en</strong>sional mo<strong>de</strong>l taking into account the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
b<strong>et</strong>we<strong>en</strong> various ass<strong>et</strong>s, the vast majority of param<strong>et</strong>ric mo<strong>de</strong>ls, available in the literature cover<br />
only the case of a single ass<strong>et</strong>. The only attempts to construct multidim<strong>en</strong>sional Lévy-based<br />
mo<strong>de</strong>ls that were ma<strong>de</strong> prior to this study concern either the case of a multivariate Brownian<br />
motion, time-changed with a one-dim<strong>en</strong>sional increasing Lévy process [79] or the case where all<br />
compon<strong>en</strong>ts have finite jump int<strong>en</strong>sity [65]. In both cases the scope of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures<br />
that one can obtain is quite limited. In the second part of this thesis we therefore propose a<br />
g<strong>en</strong>eral m<strong>et</strong>hodology to characterize <strong>de</strong>p<strong>en</strong><strong>de</strong>nce among the compon<strong>en</strong>ts of multidim<strong>en</strong>sional<br />
Lévy processes and to construct multidim<strong>en</strong>sional exp-Lévy mo<strong>de</strong>ls. This is done by introducing<br />
the notion of Lévy copula, which can be se<strong>en</strong> as an analog for Lévy processes of the notion<br />
of copula, used in statistics to mo<strong>de</strong>l <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> real random variables [56, 76].<br />
This thesis is structured as follows. The first chapter contains a brief review of the properties<br />
of Lévy processes and expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls, that are used in the sequel. The last section<br />
<strong>de</strong>scribes a m<strong>et</strong>hod, due to Carr and Madan [23], for pricing European options in expon<strong>en</strong>tial
30 INTRODUCTION<br />
Lévy mo<strong>de</strong>ls by Fourier transform. This section is the only one of the first chapter to contain<br />
new results: we propose original improvem<strong>en</strong>ts to this m<strong>et</strong>hod and obtain estimates for the<br />
truncation and discr<strong>et</strong>ization errors, that are not giv<strong>en</strong> in the original refer<strong>en</strong>ce [23].<br />
The second chapter is <strong>de</strong>dicated to the theor<strong>et</strong>ical treatm<strong>en</strong>t of the calibration problem.<br />
We start by discussing the least squares calibration m<strong>et</strong>hod, commonly used by aca<strong>de</strong>mics<br />
and practitioners. We show that in the context of non-param<strong>et</strong>ric calibration of expon<strong>en</strong>tial<br />
Lévy mo<strong>de</strong>ls, least squares calibration does not always allow to find a solution and ev<strong>en</strong> if it<br />
does, the solution is typically very s<strong>en</strong>sitive to small perturbations of input data. To solve the<br />
calibration problem in a stable manner, we first reformulate it as the problem of finding an<br />
expon<strong>en</strong>tial Lévy mo<strong>de</strong>l that has the smallest relative <strong>en</strong>tropy with respect to the prior among<br />
all solutions of the least squares calibration problem. This problem, called minimal <strong>en</strong>tropy<br />
least squares calibration, is still ill-posed, so we regularize it using the technique of minimal<br />
<strong>en</strong>tropy regularization, from the theory of ill-posed inverse problems.<br />
The third chapter discusses the numerical implem<strong>en</strong>tation of our calibration algorithm. To<br />
solve the calibration problem numerically, it is expressed in terms of the characteristic tripl<strong>et</strong>s<br />
of the prior and the solution and the Lévy measure of the prior is discr<strong>et</strong>ized on a uniform grid<br />
so that the calibration problem becomes finite-dim<strong>en</strong>sional.<br />
In the fourth chapter we first review the two available m<strong>et</strong>hods to mo<strong>de</strong>l <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong><br />
compon<strong>en</strong>ts of Lévy processes. Un<strong>de</strong>rstanding the drawbacks of these m<strong>et</strong>hods allows to<br />
formulate the <strong>de</strong>sirable properties of a multidim<strong>en</strong>sional mo<strong>de</strong>lling approach. These properties<br />
lead us to <strong>de</strong>fining the notion of Lévy copula, first in the case of Lévy processes with only<br />
positive jumps in every compon<strong>en</strong>t and th<strong>en</strong> in the g<strong>en</strong>eral case. After proving a repres<strong>en</strong>tation<br />
theorem, which shows that Lévy copulas compl<strong>et</strong>ely characterize <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures of Lévy<br />
processes, we compute Lévy copulas that correspond to various special types of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce.<br />
The fifth and the last chapter provi<strong>de</strong>s the tools necessary to apply Lévy copulas to finance.<br />
We first give m<strong>et</strong>hods to construct param<strong>et</strong>ric families of Lévy copulas and th<strong>en</strong> <strong>de</strong>velop an effici<strong>en</strong>t<br />
algorithm to simulate multidim<strong>en</strong>sional Lévy processes with <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures giv<strong>en</strong><br />
by Lévy copulas. The last section of this chapter contains an example of a multidim<strong>en</strong>sional<br />
expon<strong>en</strong>tial Lévy mo<strong>de</strong>l for option pricing, constructed using Lévy copulas.
Part I<br />
Calibration of one-dim<strong>en</strong>sional<br />
exp-Lévy mo<strong>de</strong>ls<br />
31
Chapter 1<br />
Lévy processes and exp-Lévy mo<strong>de</strong>ls<br />
This introductory chapter serves ess<strong>en</strong>tially two purposes. First, in Section 1.1, we give an<br />
overview of the probabilistic properties of Lévy processes that will be used in the sequel. Second,<br />
we <strong>de</strong>fine expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls (Section 1.2), review various param<strong>et</strong>rizations of the Lévy<br />
measure, proposed by other authors (Section 1.3) and discuss a m<strong>et</strong>hod for option pricing in<br />
these mo<strong>de</strong>ls, based on Fourier transform (Section 1.4). This option pricing m<strong>et</strong>hod is later used<br />
for the numerical solution of the calibration problem. While the results of the first three sections<br />
can be found in the literature, Section 1.4 contains new material: we improve the m<strong>et</strong>hod due<br />
to Carr and Madan [23] in a number of ways and provi<strong>de</strong> estimates of the truncation and<br />
discr<strong>et</strong>ization error, not found in the original paper.<br />
1.1 Lévy processes<br />
Proofs of the the results of this section can be found, unless otherwise m<strong>en</strong>tioned in [87]. For<br />
additional <strong>de</strong>tails on Lévy processes the rea<strong>de</strong>r may consult [17] or [54]. The latter book treats<br />
a far more g<strong>en</strong>eral class of semimartingales but properties of Lévy processes are oft<strong>en</strong> discussed<br />
as examples or corollaries of the g<strong>en</strong>eral results.<br />
Definition 1.1 (Lévy process). A stochastic process {X t } t≥0 on (Ω, F, P ) such that X 0 = 0<br />
is called a Lévy process if it possesses the following properties:<br />
1. In<strong>de</strong>p<strong>en</strong><strong>de</strong>nt increm<strong>en</strong>ts: for every increasing sequ<strong>en</strong>ce of times t 0 . . . t n , the random variables<br />
X t0 , X t1 − X t0 , . . . , X tn − X tn−1<br />
are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt.<br />
33
34 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
2. Stationary increm<strong>en</strong>ts: for every h > 0, the law of X t+h − X t does not <strong>de</strong>p<strong>en</strong>d on t.<br />
The law of a Lévy process is compl<strong>et</strong>ely i<strong>de</strong>ntified by its characteristic tripl<strong>et</strong> (A, ν, γ), where<br />
A is a symm<strong>et</strong>ric nonnegative-<strong>de</strong>finite d × d matrix, γ ∈ R d and ν is a Lévy measure, that is, a<br />
positive measure on R d \ {0}, satisfying<br />
∫<br />
(|x| 2 ∧ 1)ν(dx) < ∞.<br />
R d \{0}<br />
In particular, the characteristic function of X t can be computed from this tripl<strong>et</strong> as follows.<br />
Theorem 1.1 (Lévy-Khintchine repres<strong>en</strong>tation). L<strong>et</strong> {X t } t≥0 be a Lévy process on R d<br />
with characteristic tripl<strong>et</strong> (A, ν, γ). Th<strong>en</strong><br />
E[e i〈z,Xt〉 ] = e tψ(z) , z ∈ R d (1.1)<br />
with ψ(z) = − 1 2 〈z, Az〉 + i〈γ, z〉 + ∫R d (e i〈z,x〉 − 1 − i〈z, x〉1 |x|≤1 )ν(dx).<br />
Remark 1.1. L<strong>et</strong> h : R d → R d be a measurable function, such that for every z, e i〈z,x〉 − 1 −<br />
i〈z, h(x)〉 is integrable with respect to ν. Th<strong>en</strong> the second equation in the Lévy-Khintchine<br />
formula (1.1) may be rewritt<strong>en</strong> as<br />
ψ(z) = − 1 ∫<br />
2 〈z, Az〉 + i〈γ h, z〉 + (e i〈z,x〉 − 1 − i〈z, h(x)〉)ν(dx),<br />
R d<br />
where γ h = γ +<br />
∫ ∞<br />
−∞<br />
(h(x) − x1 |x|≤1 )ν(dx).<br />
The tripl<strong>et</strong> (A, ν, γ h ) is called the characteristic tripl<strong>et</strong> of {X t } t≥0 with respect to the truncation<br />
function h. For instance, if ∫ R d (|x|∧1)ν(dx) < ∞, one may take h ≡ 0 and the Lévy-Khintchine<br />
repres<strong>en</strong>tation becomes<br />
ψ(z) = − 1 ∫<br />
2 〈z, Az〉 + i〈γ 0, z〉 + (e i〈z,x〉 − 1)ν(dx).<br />
R d<br />
The vector γ 0 is in this case called drift of the process X.<br />
The tail behavior and mom<strong>en</strong>ts of the distribution of a Lévy process at a giv<strong>en</strong> time are<br />
<strong>de</strong>termined by the Lévy measure, as shown by the following proposition (see Proposition 2.5<br />
and Theorems 25.3 and 25.17 in [87]).
1.1. LEVY PROCESSES 35<br />
Proposition 1.2 (Mom<strong>en</strong>ts and cumulants of a Lévy process).<br />
1. L<strong>et</strong> {X t } t≥0 be a Lévy process on R with characteristic tripl<strong>et</strong> (A, ν, γ) and l<strong>et</strong> n ≥ 1.<br />
E[|X t | n ] < ∞ for some t > 0 or equival<strong>en</strong>tly for every t if and only if ∫ |x|≥1 |x|n ν(dx) < ∞.<br />
In this case Φ t (z), the characteristic function of X t , is of class C n and the first n mom<strong>en</strong>ts<br />
of X t can be computed by differ<strong>en</strong>tiation:<br />
E[Xt k ] = 1 ∂ k<br />
i k ∂z k Φ t(z)| z=0 , k = 1, . . . , n.<br />
The cumulants of X t , <strong>de</strong>fined by<br />
c k (X t ) := 1 ∂ k<br />
i k ∂z k log Φ t(z)| z=0 ,<br />
have a particularly simple structure:<br />
∫<br />
c 1 (X t ) ≡ E[X t ] = t(γ + xν(dx)),<br />
c 2 (X t ) ≡ Var X t = t(A +<br />
c k (X t ) = t<br />
∫ ∞<br />
−∞<br />
|x|≥1<br />
∫ ∞<br />
−∞<br />
x 2 ν(dx)),<br />
x k ν(dx) for 3 ≤ k ≤ n.<br />
2. L<strong>et</strong> {X t } t≥0 be a Lévy process on R with characteristic tripl<strong>et</strong> (A, ν, γ) and l<strong>et</strong> u ∈ R.<br />
E[e uXt ] < ∞ for some t or, equival<strong>en</strong>tly, for all t > 0 if and only if ∫ |x|≥1 eux ν(dx) < ∞.<br />
In this case<br />
E[e uXt ] = e tψ(−iu) .<br />
where ψ is the characteristic expon<strong>en</strong>t of the Lévy process <strong>de</strong>fined by (1.1).<br />
Corollary 1.1. L<strong>et</strong> {X t } t≥0 be a Lévy process on R with characteristic tripl<strong>et</strong> (A, ν, γ).<br />
1. {X t } t≥0 is a martingale if and only if ∫ |x|≥1<br />
|x|ν(dx) < ∞ and<br />
∫<br />
γ + xν(dx) = 0.<br />
|x|≥1<br />
2. {exp(X t )} t≥0 is a martingale if and only if ∫ |x|≥1 ex ν(dx) < ∞ and<br />
∫<br />
A<br />
∞<br />
2 + γ + (e x − 1 − x1 |x|≤1 )ν(dx) = 0. (1.2)<br />
−∞
36 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
1.1.1 Stochastic expon<strong>en</strong>tial of Lévy processes<br />
The stochastic (Doléans-Da<strong>de</strong>) expon<strong>en</strong>tial of a semimartingale {X t } t≥0 (see [54, Theorem<br />
I.4.61]) is <strong>de</strong>fined as the unique càdlàg process {Z t } t≥0 such that<br />
dZ t = Z t− dX t , Z 0 = 1. (1.3)<br />
Z is giv<strong>en</strong> by:<br />
∏<br />
Z t = e Xt−X 0− 1 2 [X]c t (1 + ∆X s )e −∆Xs . (1.4)<br />
0≤s≤t<br />
The stochastic expon<strong>en</strong>tial of X is <strong>de</strong>noted by E(X). The following result, due to Goll and<br />
Kalls<strong>en</strong> [47] clarifies the relation b<strong>et</strong>we<strong>en</strong> the stochastic and the ordinary expon<strong>en</strong>tial wh<strong>en</strong> X<br />
is a Lévy process.<br />
Proposition 1.3 (Relation b<strong>et</strong>we<strong>en</strong> ordinary and stochastic expon<strong>en</strong>tials).<br />
1. L<strong>et</strong> {X t } t≥0 be a real-valued Lévy process with characteristic tripl<strong>et</strong> (A, ν, γ) and Z = E(X)<br />
its stochastic expon<strong>en</strong>tial. If Z > 0 a.s. th<strong>en</strong> there exists another Lévy process {L t } t≥0<br />
such that for all t, Z t = e Lt , where<br />
L t = log Z t = X t − At<br />
2 + ∑<br />
0≤s≤t<br />
Its characteristic tripl<strong>et</strong> (A L , ν L , γ L ) is giv<strong>en</strong> by:<br />
{<br />
log(1 + ∆Xs ) − ∆X s<br />
}<br />
. (1.5)<br />
A L = A,<br />
ν L (B) = ν({x : log(1 + x) ∈ B}) =<br />
∫ ∞<br />
−∞<br />
1 B (log(1 + x))ν(dx), B ∈ B(R \ {0}), (1.6)<br />
γ L = γ − A ∫ ∞<br />
2 + ν(dx) { log(1 + x)1 [−1,1] (log(1 + x)) − x1 [−1,1] (x) } .<br />
−∞<br />
2. L<strong>et</strong> {L t } t≥0 be a real-valued Lévy process with characteristic tripl<strong>et</strong> (A L , ν L , γ L ) and S t =<br />
exp L t its expon<strong>en</strong>tial. Th<strong>en</strong> there exists a Lévy process {X t } t≥0 such that S t is the<br />
stochastic expon<strong>en</strong>tial of X: S = E(X) where<br />
X t = L t + At<br />
2 + ∑<br />
0≤s≤t<br />
{<br />
e<br />
∆L s<br />
− 1 − ∆L s<br />
}<br />
. (1.7)
1.1. LEVY PROCESSES 37<br />
The characteristic tripl<strong>et</strong> (A, ν, γ) of X is giv<strong>en</strong> by:<br />
A = A L ,<br />
ν(B) = ν L ({x : e x − 1 ∈ B}) =<br />
γ = γ L + A L<br />
2 + ∫ ∞<br />
−∞<br />
∫ ∞<br />
−∞<br />
1 B (e x − 1)ν L (dx), B ∈ B(R \ {0}), (1.8)<br />
ν L (dx) { (e x − 1)1 [−1,1] (e x − 1) − x1 [−1,1] (x) } .<br />
Equation (1.3) shows that the stochastic expon<strong>en</strong>tial of a martingale is necessarily a local<br />
martingale.<br />
For Lévy processes, however, a stronger result is true, namely, the stochastic<br />
expon<strong>en</strong>tial of a martingale Lévy process is a (true) martingale.<br />
This fact seems to belong<br />
to the folklore of the Lévy process theory but we have be<strong>en</strong> unable to find its proof in the<br />
literature.<br />
Proposition 1.4 (Martingale preserving property). If {X t } t≥0 is a Lévy process and a<br />
martingale, th<strong>en</strong> its stochastic expon<strong>en</strong>tial Z = E(X) is also a martingale.<br />
Proof. L<strong>et</strong> {X t } t≥0 be a Lévy process on R with tripl<strong>et</strong> (A, ν, γ) such that γ + ∫ |x|≥1 xν(dx) = 0<br />
(this implies that X is a martingale). First, suppose that |∆X s | ≤ ε < 1 a.s. Th<strong>en</strong><br />
and Equation (1.4) implies that<br />
⎛<br />
log(1 + ∆X s ) − ∆X s ≥ −<br />
∆X2 s<br />
2(1 − ε) 2<br />
Z t ≥ exp ⎝X t − X 0 − 1 2 [X]c t −<br />
1 ∑<br />
2(1 − ε) 2<br />
0≤s≤t<br />
∆X 2 s<br />
⎞<br />
⎠ > 0<br />
a.s.<br />
Therefore by Proposition 1.3 there exists a Lévy process L such that e Lt = Z t for all t. Moreover,<br />
this process has boun<strong>de</strong>d jumps and therefore admits all expon<strong>en</strong>tial mom<strong>en</strong>ts.<br />
Proposition 1.3, we can write:<br />
Again, by<br />
γ L + A ∫ ∞<br />
L<br />
2 + (e z − 1 − z1 |z|≤1 )ν L (dz) = γ +<br />
−∞<br />
+<br />
∫ ∞<br />
−∞<br />
∫ 1<br />
−1<br />
(e z − 1 − z1 |z|≤1 )ν L (dz) =<br />
{zν L (dz) − zν(dz)}<br />
∫ ∞<br />
−∞<br />
{(e z − 1)ν L (dz) − zν(dz)} = 0<br />
because ∆X s = e ∆Ls − 1 for all s. Therefore, by Corollary 1.1, Z t = e Lt is a martingale.<br />
The second step is to prove the proposition wh<strong>en</strong> X is a comp<strong>en</strong>sated compound Poisson<br />
process. In this case, the stochastic expon<strong>en</strong>tial has a very simple form:<br />
∏<br />
Z t = e bt (1 + ∆X s ),<br />
0≤s≤t
38 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
where b = − ∫ ∞<br />
−∞<br />
xν(dx). D<strong>en</strong>oting the jump int<strong>en</strong>sity of X by λ, and the g<strong>en</strong>eric jump of X<br />
by ∆X, we obtain, conditioning on the number of jumps of X in the interval [0, t]:<br />
E[Z t ] = e −λt+bt<br />
∞ ∑<br />
n=0<br />
(λt) n<br />
(1 + E[∆X]) n = 1.<br />
n!<br />
Because the increm<strong>en</strong>ts of X are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt and stationary, this proves that Z is a martingale.<br />
Now l<strong>et</strong> X be an arbitrary martingale Lévy process.<br />
It can be <strong>de</strong>composed into a sum<br />
of a comp<strong>en</strong>sated compound Poisson process X ′ and an in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt martingale Lévy process<br />
with jumps smaller than ε, <strong>de</strong>noted by X ′′ . Since these two processes never jump tog<strong>et</strong>her,<br />
E(X ′ + X ′′ ) = E(X ′ )E(X ′′ ) (cf. Equation II.8.19 in [54]). Moreover, each of the factors is a<br />
martingale and they are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt, h<strong>en</strong>ce E(X ′ + X ′′ ) is a martingale.<br />
1.1.2 Change of measure and absolute continuity of Lévy processes<br />
The following proposition (see [54], Theorem IV.4.39) provi<strong>de</strong>s a criterion of absolute continuity<br />
of one Lévy process with respect to another in terms of their characteristic tripl<strong>et</strong>s.<br />
Proposition 1.5 (Absolute continuity of Lévy processes). L<strong>et</strong> {X t } t≥0 be a real-valued<br />
Lévy process on (Ω, F, Q) and on (Ω, F, P ) with respective characteristic tripl<strong>et</strong>s (A Q , ν Q , γ Q )<br />
and (A P , ν P , γ P ). Th<strong>en</strong> Q| Ft ≪ P | Ft for all t ∈ [0, T ∞ ] or, equival<strong>en</strong>tly, Q| Ft ≪ P | Ft for some<br />
t ∈ (0, T ∞ ] if and only if the following conditions are satisfied:<br />
1. A Q = A P := A.<br />
2. ν Q ≪ ν P .<br />
3. ∫ ∞<br />
−∞ (√ φ(x) − 1) 2 ν P (dx) < ∞, where φ := dν Q<br />
dν P<br />
.<br />
4. ∫ |x|≤1 |x(1 − φ(x))|ν P (dx) < ∞.<br />
5. If A = 0 th<strong>en</strong> γ Q − γ P = ∫ |x|≤1 x(φ(x) − 1)ν P (dx).<br />
Remark 1.2. In fact, condition 4 above is a consequ<strong>en</strong>ce of condition 3. In<strong>de</strong>ed, on the s<strong>et</strong><br />
{x : φ(x) > 4}, we have ( √ φ(x) − 1) 2 > 1 and (√ φ(x)−1) 2<br />
∫<br />
{φ(x)>4}<br />
and<br />
∫<br />
∫<br />
ν P (dx) ≤<br />
{φ(x)>4}<br />
{φ(x)>4}<br />
∫<br />
φ(x)ν P (dx) < 4<br />
φ(x)<br />
( √ φ(x) − 1) 2 ν P (dx) < ∞<br />
{φ(x)>4}<br />
> 1 4<br />
. Therefore, condition 3 implies<br />
( √ φ(x) − 1) 2 ν P (dx) < ∞.
1.1. LEVY PROCESSES 39<br />
On the other hand,<br />
∫<br />
∫<br />
|x(1 − φ(x))|ν P (dx) =<br />
|x|≤1<br />
|x|≤1;φ(x)>4<br />
The first term in the right-hand si<strong>de</strong> satisfies:<br />
∫<br />
∫<br />
|x(1 − φ(x))|ν P (dx) ≤<br />
|x|≤1;φ(x)>4<br />
and for the second term one can write:<br />
∫<br />
|x|≤1;φ(x)≤4<br />
|x(1 − φ(x))|ν P (dx)<br />
∫<br />
≤<br />
|x|≤1;φ(x)≤4<br />
∫<br />
|x(1 − φ(x))|ν P (dx) +<br />
|x(1 − φ(x))|ν P (dx).<br />
|x|≤1;φ(x)≤4<br />
|x|≤1;φ(x)>4<br />
∫<br />
ν P (dx) +<br />
φ(x)ν P (dx) < ∞,<br />
|x|≤1;φ(x)>4<br />
∫<br />
|x| 2 ν P (dx) +<br />
( √ φ(x) − 1) 2 ( √ φ(x) + 1) 2 ν P (dx) < ∞.<br />
|x|≤1;φ(x)≤4<br />
A real-valued Lévy process with characteristic tripl<strong>et</strong> (A, ν, γ) is said to be of jump-diffusion<br />
type if A > 0 and ν(R \ {0}) < ∞.<br />
Corollary 1.2. L<strong>et</strong> {X t } t≥0 be a Lévy process of jump-diffusion type un<strong>de</strong>r P . Th<strong>en</strong> Q| Ft ≪<br />
P | Ft for all t ∈ [0, T ∞ ] or, equival<strong>en</strong>tly, Q| Ft ≪ P | Ft for some t ∈ (0, T ∞ ] if and only if X is of<br />
jump-diffusion type un<strong>de</strong>r Q and conditions 1 and 2 of Proposition 1.5 are satisfied.<br />
Proof. Observe that for all u, v and r > 0,<br />
(1 − r)u 2 + (1 − 1/r)v 2 ≤ (u + v) 2 ≤ (1 + r)u 2 + (1 + 1/r)v 2 .<br />
Taking u = √ φ(x), v = −1 and r = 1/2, we obtain:<br />
Suppose that Q| Ft ≪ P | Ft<br />
1<br />
2 φ(x) − 1 ≤ (√ φ(x) − 1) 2 ≤ 3 φ(x) + 3. (1.9)<br />
2<br />
for all t. Th<strong>en</strong> (1.9) implies that<br />
ν Q (R \ {0}) ≤ 2ν P (R \ {0}) + 2<br />
∫ ∞<br />
−∞<br />
and therefore {X t } t≥0 is of jump-diffusion type un<strong>de</strong>r Q.<br />
( √ φ(x) − 1) 2 ν P (dx) < ∞<br />
Suppose that {X t } t≥0 is of jump-diffusion type un<strong>de</strong>r Q and conditions 1 and 2 are satisfied.<br />
On account of Remark 1.2, we only need to verify condition 3 of the proposition. Equation<br />
(1.9) implies that<br />
∫ ∞<br />
−∞<br />
which compl<strong>et</strong>es the proof.<br />
( √ φ(x) − 1) 2 ν P (dx) ≤ 3ν P (R \ {0}) + 3 2 ν Q(R \ {0}) < ∞,
40 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
1.1.3 Tightness and converg<strong>en</strong>ce of sequ<strong>en</strong>ces of Lévy processes<br />
L<strong>et</strong> E be a Polish space with Borel σ-field F. The space of all probability measures on (E, F) is<br />
<strong>de</strong>noted by P(E). The weak topology on P(E) is the coarsest topology for which the mappings<br />
µ ∈ P(E) ↦→ µ(f) are continuous for all boun<strong>de</strong>d continuous functions f on E. We recall that<br />
a subs<strong>et</strong> B ⊂ P(E) is called tight if for every ε > 0 there exists a compact subs<strong>et</strong> K ⊂ E such<br />
that µ(E \K) ≤ ε for all µ ∈ B. Prohorov’s theorem states that a subs<strong>et</strong> B ⊂ P(E) is relatively<br />
compact for the weak topology if and only if it is tight.<br />
The space of all càdlàg functions on [0, T ∞ ], equipped with Skorokhod topology (see Chapter<br />
VI in [54]) is a Polish space and all of the above remains valid. The following result is a corollary<br />
(an adaptation for the case Lévy processes) of Theorem VI.4.18 in [54].<br />
Proposition 1.6. L<strong>et</strong> {X n } n≥1 be a sequ<strong>en</strong>ce of real-valued Lévy processes with characteristic<br />
tripl<strong>et</strong>s (A n , ν n , γ n ). For {X n } to be tight it suffices that<br />
1. The sequ<strong>en</strong>ce of Lévy measures {ν n } satisfies<br />
2. The sequ<strong>en</strong>ce {γ n } is boun<strong>de</strong>d.<br />
lim sup ν n ({x : |x| > a}) = 0.<br />
a→∞<br />
3. The sequ<strong>en</strong>ce {C n } is boun<strong>de</strong>d, where C n = A n + ∫ ∞<br />
−∞ (x2 ∧ 1)ν n (dx).<br />
n<br />
The next result characterizes the weak converg<strong>en</strong>ce of sequ<strong>en</strong>ces of Lévy processes (cf.<br />
Corollary VII.3.6 in [54]).<br />
Proposition 1.7. L<strong>et</strong> {X n } n≥1 and X be real-valued Lévy processes with characteristic tripl<strong>et</strong>s<br />
(A n , ν n , γ h n) n≥1 and (A, ν, γ h ) with respect to a truncation function h (cf. Remark 1.1), that<br />
is continuous, boun<strong>de</strong>d and satisfies h(x) ≡ x on a neighborhood of 0. There is equival<strong>en</strong>ce<br />
b<strong>et</strong>we<strong>en</strong><br />
1. X n d → X.<br />
2. X n 1<br />
d<br />
→ X 1 .<br />
3. The following conditions are satisfied:<br />
(a) γ h n → γ h .
1.2. EXPONENTIAL LEVY MODELS 41<br />
(b) C n → C, where C ∗ = A ∗ + ∫ ∞<br />
−∞ h2 (x)ν ∗ (dx).<br />
(c) ∫ ∞<br />
−∞ f(x)ν n(dx) → ∫ ∞<br />
−∞<br />
f(x)ν(dx) for every continuous boun<strong>de</strong>d function f such that<br />
f(x) ≡ 0 on a neighborhood of zero, or, equival<strong>en</strong>tly, for every continuous boun<strong>de</strong>d<br />
function f satisfying f(x) = o(|x| 2 ) wh<strong>en</strong> x → 0.<br />
1.2 Expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls: <strong>de</strong>finition and main properties<br />
Expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls are obtained by replacing the Brownian motion with drift in the<br />
classical Black-Scholes-Samuelson mo<strong>de</strong>l of ass<strong>et</strong> price, by a Lévy process:<br />
S t = S 0 e rt+Xt , (1.10)<br />
where X is a Lévy process on (Ω, F, P ), and the interest rate term rt is introduced to simplify<br />
the notation below. Wh<strong>en</strong> P is the probability that <strong>de</strong>scribes the evolution of stock prices<br />
in the real world, also called the historical probability, the mo<strong>de</strong>l (1.10) is called a historical<br />
expon<strong>en</strong>tial Lévy mo<strong>de</strong>l.<br />
By the first fundam<strong>en</strong>tal theorem of ass<strong>et</strong> pricing (see [34]), a financial mark<strong>et</strong> does not<br />
allow for arbitrage opportunity (more precisely, satisfies the No Free Lunch with Vanishing Risk<br />
condition) if there exists a probability measure Q, equival<strong>en</strong>t to P , such that the discounted<br />
prices e −rt V t of all ass<strong>et</strong>s are Q-local martingales. Q is called a risk-neutral probability. The<br />
abs<strong>en</strong>ce of arbitrage in the mo<strong>de</strong>l (1.10) is therefore equival<strong>en</strong>t to the exist<strong>en</strong>ce of a probability<br />
Q ∼ P , such that e X is a Q-local martingale. The following result shows that if X is a Lévy<br />
process un<strong>de</strong>r P , one can almost always find a probability Q ∼ P , un<strong>de</strong>r which X is still a Lévy<br />
process and e X is a martingale.<br />
Proposition 1.8 (Abs<strong>en</strong>ce of arbitrage in exp-Lévy mo<strong>de</strong>ls). L<strong>et</strong> {X t } t≥0 be a Lévy<br />
process on (Ω, F, P ) with characteristic tripl<strong>et</strong> (A, ν, γ). If the trajectories of X are neither<br />
almost surely increasing nor almost surely <strong>de</strong>creasing, th<strong>en</strong> there exists a probability measure Q<br />
equival<strong>en</strong>t to P such that un<strong>de</strong>r Q, {X t } t≥0 is a Lévy process and {e Xt } t≥0 is a martingale.<br />
Q may be chos<strong>en</strong> in such way that (X, Q) will have the characteristic tripl<strong>et</strong> (A Q , ν Q , γ Q ),
42 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
where<br />
for some θ ∈ R.<br />
A Q = A, ν Q = e −x2 +θx ν, (1.11)<br />
∫<br />
γ Q = γ + Aθ + x(e −x2 +θx − 1)ν(dx) (1.12)<br />
|x|≤1<br />
In other words, this proposition shows that expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls are arbitrage-free in<br />
the following (not mutually exclusive) cases:<br />
• X has infinite variation ∫ 1<br />
−1<br />
|x|ν(dx) = ∞ and/or A > 0.<br />
• X has both positive and negative jumps.<br />
• X has positive jumps and negative drift or negative jumps and positive drift.<br />
In the sequel, we will <strong>de</strong>note the s<strong>et</strong> of Lévy processes satisfying at least one of these conditions<br />
by L NA and the corresponding expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls will be called arbitrage-free expon<strong>en</strong>tial<br />
Lévy mo<strong>de</strong>ls.<br />
The first part of this proposition was proved in [55], see also [25, Theorem 4.6]. Since the<br />
second part will also be used below, we give a proof here.<br />
Proof of Proposition 1.8. For any θ ∈ R we <strong>de</strong>note the probability measure un<strong>de</strong>r which X has<br />
the characteristic tripl<strong>et</strong> (1.11)–(1.12) by Q θ . From Proposition 1.5 it follows easily that for<br />
every θ ∈ R, both Q θ ≪ P and P ≪ Q θ . Therefore, we only need to prove that for some θ, the<br />
tripl<strong>et</strong> (A, ν Qθ , γ Qθ ) satisfies the martingale condition (1.2), or equival<strong>en</strong>tly, that the equation<br />
has a solution, where<br />
f(θ) := A 2 + Aθ + ∫<br />
|x|≤1<br />
f(θ) + γ = 0 (1.13)<br />
x(e −x2 +θx − 1)ν(dx) +<br />
∫ ∞<br />
−∞<br />
(e x − 1 − x1 |x|≤1 )e −x2 +θx ν(dx)<br />
The dominated converg<strong>en</strong>ce theorem implies that f is continuous and differ<strong>en</strong>tiable and that<br />
f ′ (θ) = A + ∫ ∞<br />
−∞ x(ex − 1)e −x2 +θx ν(dx) ≥ 0, which means that f(θ) is an increasing function.<br />
Moreover, if A > 0 or if ν((0, ∞)) > 0 and ν((−∞, 0)) > 0 th<strong>en</strong> f ′ is everywhere boun<strong>de</strong>d from<br />
below by a positive number. Therefore in these cases lim θ→+∞ f(θ) = +∞, lim θ→−∞ f(θ) =<br />
−∞ and Equation (1.13) admits a solution.
1.3. EXP-LEVY MODELS IN FINANCE 43<br />
It remains to treat the case wh<strong>en</strong> A = 0 and ν is supported by one of the half-axes. Suppose<br />
that ν((−∞, 0)) = 0 and ν((0, ∞)) > 0. In this case lim θ→+∞ f(θ) = +∞ and<br />
lim f(θ) = − xν(dx).<br />
θ→−∞<br />
∫0
44 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
where {N t } t≥0 is the Poisson process counting the jumps of X and Y i are jump sizes (i.i.d.<br />
variables).<br />
In the Merton mo<strong>de</strong>l [71], which is the first mo<strong>de</strong>l of this type, suggested in the literature,<br />
jumps in the log-price X are assumed to have a Gaussian distribution: Y i ∼ N(µ, δ 2 ). In the<br />
risk-neutral version the characteristic expon<strong>en</strong>t of the log stock price takes the following form:<br />
(<br />
ψ(u) = − Au2<br />
2 + u 2 A /2+iµu λ{e−δ2 − 1} − iu<br />
2 + /2+µ λ(eδ2 − 1))<br />
. (1.16)<br />
In the Kou mo<strong>de</strong>l [62], jump sizes are distributed according to an asymm<strong>et</strong>ric Laplace law<br />
with a <strong>de</strong>nsity of the form<br />
ν 0 (dx) = [pλ + e −λ +x 1 x>0 + (1 − p)λ − e −λ −|x| 1 x 0, λ − > 0 governing the <strong>de</strong>cay of the tails for the distribution of positive and negative<br />
jump sizes and p ∈ [0, 1] repres<strong>en</strong>ting the probability of an upward jump. The probability<br />
distribution of r<strong>et</strong>urns in this mo<strong>de</strong>l has semi-heavy (expon<strong>en</strong>tial) tails.<br />
In the above two mo<strong>de</strong>ls, the dynamical structure of the process is easy to un<strong>de</strong>rstand and<br />
<strong>de</strong>scribe, since the distribution of jump sizes is known. They are easy to simulate and effici<strong>en</strong>t<br />
Monte Carlo m<strong>et</strong>hods for pricing path-<strong>de</strong>p<strong>en</strong><strong>de</strong>nt options have be<strong>en</strong> <strong>de</strong>veloped. Mo<strong>de</strong>ls of this<br />
type also perform quite well for the purposes of implied volatility smile interpolation. However,<br />
they do not lead to closed-form <strong>de</strong>nsities: statistical estimation and computation of mom<strong>en</strong>ts<br />
or quantiles may be quite difficult.<br />
The second category consists of mo<strong>de</strong>ls with infinite number of jumps in every interval,<br />
which we will call infinite activity or infinite int<strong>en</strong>sity mo<strong>de</strong>ls. In these mo<strong>de</strong>ls, one does not<br />
need to introduce a Brownian compon<strong>en</strong>t since the dynamics of jumps is already rich <strong>en</strong>ough<br />
to g<strong>en</strong>erate nontrivial small time behavior [21] and it has be<strong>en</strong> argued [21, 43, 66] that such<br />
mo<strong>de</strong>ls give a more realistic <strong>de</strong>scription of the price process at various time scales. In addition,<br />
many mo<strong>de</strong>ls from this class can be constructed via Brownian subordination, which gives them<br />
additional tractability compared to jump-diffusion mo<strong>de</strong>ls.<br />
Table 1.1 compares the advantages and drawbacks of these two categories. It should be kept<br />
in mind that since the price process is observed on a discr<strong>et</strong>e grid, it is difficult if not impossible<br />
to see empirically to which category the price process belongs. The choice is more a question<br />
of mo<strong>de</strong>lling conv<strong>en</strong>i<strong>en</strong>ce than an empirical one.
1.3. EXP-LEVY MODELS IN FINANCE 45<br />
Table 1.1: Compound Poisson or infinite int<strong>en</strong>sity: a comparison of two mo<strong>de</strong>lling approaches<br />
Jump-diffusion mo<strong>de</strong>ls<br />
Must contain a Brownian compon<strong>en</strong>t.<br />
Jumps are rare ev<strong>en</strong>ts.<br />
Distribution of jump sizes is known.<br />
Perform well for implied volatility smile interpolation.<br />
D<strong>en</strong>sities not known in closed form.<br />
Easy to simulate.<br />
Infinite int<strong>en</strong>sity mo<strong>de</strong>ls<br />
Brownian compon<strong>en</strong>t is not nee<strong>de</strong>d.<br />
The process moves only by jumps and <strong>de</strong>terministic<br />
linear drift.<br />
“Distribution of jump sizes” does not exist:<br />
jumps arrive infinitely oft<strong>en</strong>.<br />
Give a realistic <strong>de</strong>scription of the historical<br />
price process.<br />
Closed form <strong>de</strong>nsities available in some<br />
cases.<br />
In some cases can be repres<strong>en</strong>ted via Brownian<br />
subordination, which gives additional<br />
tractability.
46 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
There are three standard ways to <strong>de</strong>fine a param<strong>et</strong>ric Lévy process with infinite jump int<strong>en</strong>sity,<br />
summarized in Table 1.2.<br />
The first approach is to obtain a Lévy process by subordinating a Brownian motion with an<br />
in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt increasing Lévy process (such a process is called a subordinator). Here the characteristic<br />
function of the resulting process can be obtained immediately, but an explicit formula<br />
for the Lévy measure is not always available. Due to the conditionally Gaussian structure of<br />
the process, simulation and some computations can be consi<strong>de</strong>rably simplified (for instance, call<br />
option price can be expressed as an integral involving Black-Scholes prices). The interpr<strong>et</strong>ation<br />
of the subordinator as “business time” [44] makes mo<strong>de</strong>ls of this type easier to un<strong>de</strong>rstand and<br />
interpr<strong>et</strong>. Multidim<strong>en</strong>sional ext<strong>en</strong>sions are also possible: one can take a multivariate Brownian<br />
motion and change the time scale of all compon<strong>en</strong>ts with the same subordinator. Two examples<br />
of mo<strong>de</strong>ls from this class are the variance gamma process and the normal inverse Gaussian<br />
process. The variance gamma process [23, 67] is obtained by time-changing a Brownian motion<br />
with a gamma subordinator and has the characteristic expon<strong>en</strong>t of the form:<br />
ψ(u) = − 1 κ log(1 + u2 σ 2 κ<br />
2<br />
− iθκu). (1.18)<br />
The <strong>de</strong>nsity of the Lévy measure of the variance gamma process is giv<strong>en</strong> by<br />
where c = 1/κ, λ + =<br />
ν(x) = c<br />
|x| e−λ −|x| 1 x0 , (1.19)<br />
√<br />
θ 2 +2σ 2 /κ<br />
σ 2<br />
− θ<br />
σ 2 and λ − =<br />
√<br />
θ 2 +2σ 2 /κ<br />
σ 2<br />
+ θ<br />
σ 2 .<br />
The normal inverse Gaussian process [5, 7, 86] is the result of time-changing a Brownian<br />
motion with the inverse Gaussian subordinator and has the characteristic expon<strong>en</strong>t:<br />
ψ(u) = 1 κ − 1 κ√<br />
1 + u 2 σ 2 κ − 2iθuκ.<br />
The second approach is to specify the Lévy measure directly. The main example of this<br />
category is giv<strong>en</strong> by the tempered stable process, introduced by Kopon<strong>en</strong> [61] and used for<br />
financial mo<strong>de</strong>lling in [18, 26, 27], as well as in [22] (un<strong>de</strong>r the name of CGMY mo<strong>de</strong>l) and in<br />
[19] (un<strong>de</strong>r the name of KoBoL process). The tempered stable process has a Lévy measure with<br />
<strong>de</strong>nsity of the form:<br />
ν(x) =<br />
c −<br />
|x| 1+α − e−λ −|x| 1 x0 (1.20)
1.4. PRICING EUROPEAN OPTIONS 47<br />
with α + < 2 and α − < 2. This rich param<strong>et</strong>ric form of the Lévy measure is probably suffici<strong>en</strong>t<br />
for most applications.<br />
The third approach is to specify the <strong>de</strong>nsity of increm<strong>en</strong>ts of the process at a giv<strong>en</strong> time<br />
scale, say ∆, by taking an arbitrary infinitely divisible distribution. G<strong>en</strong>eralized hyperbolic<br />
processes (see [36–38]) can be constructed in this way. In this approach it is easy to simulate<br />
the increm<strong>en</strong>ts of the process at the same time scale and to estimate param<strong>et</strong>ers of the distribution<br />
if data are sampled with the same period ∆, but, unless this distribution belongs to<br />
some param<strong>et</strong>ric class closed un<strong>de</strong>r convolution, we do not know the law of the increm<strong>en</strong>ts at<br />
other time scales. Also, giv<strong>en</strong> an infinitely divisible distribution, one may not know its Lévy-<br />
Khintchine repres<strong>en</strong>tation, so it may not be easy to see wh<strong>et</strong>her the corresponding Lévy process<br />
has a Gaussian compon<strong>en</strong>t, finite or infinite jump int<strong>en</strong>sity, <strong>et</strong>c.<br />
1.4 Pricing European options in exp-Lévy mo<strong>de</strong>ls via Fourier<br />
transform<br />
In this section we pres<strong>en</strong>t a m<strong>et</strong>hod, adapted from [23], for pricing European call options in exp-<br />
Lévy mo<strong>de</strong>ls using Fourier transform and, in particular, the Fast Fourier transform algorithm<br />
[29]. We suggest several improvem<strong>en</strong>ts to the original procedure and give a rigorous analysis of<br />
truncation and discr<strong>et</strong>ization errors. These results are of in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt interest and will also be<br />
used for the numerical solution of the calibration problem in Chapter 3. Similar analysis has<br />
rec<strong>en</strong>tly appeared in [63].<br />
L<strong>et</strong> {X t } t≥0 be a Lévy process satisfying the martingale condition (1.2). To compute the<br />
price of a call option<br />
C(k) = e −rT E[(e rT +X T<br />
− e k ) + ], (1.21)<br />
we would like to express its Fourier transform in log strike in terms of the characteristic function<br />
Φ T (v) of X T and th<strong>en</strong> find the prices for a range of strikes by Fourier inversion. However we<br />
cannot do this directly because C(k) is not integrable (it t<strong>en</strong>ds to 1 as k goes to −∞). The<br />
key i<strong>de</strong>a is to instead compute the Fourier transform of the (modified) time value of the option,<br />
that is, the function<br />
z T (k) = e −rT E[(e rT +X T<br />
− e k ) + ] − (1 − e k−rT ) + . (1.22)
48 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
Table 1.2: Three approaches to building param<strong>et</strong>ric exp-Lévy mo<strong>de</strong>ls<br />
Brownian subordination Specifying the Lévy<br />
measure<br />
Specifying<br />
<strong>de</strong>nsity for t = ∆<br />
probability<br />
Interpr<strong>et</strong>ation as “Brownian<br />
motion in business time”.<br />
Clear vision of the pathwise<br />
properties.<br />
Structure of jumps is not<br />
known.<br />
Simulation is easy if we know<br />
how to simulate the subordinator.<br />
Simulation is quite involved.<br />
Simulation is easy on a grid<br />
of size ∆.<br />
Estimation via maximum<br />
likelihood may be difficult.<br />
Estimation can be done by<br />
approximating the transition<br />
<strong>de</strong>nsity.<br />
Estimation is easy for data<br />
with sampling interval ∆.<br />
Multivariate g<strong>en</strong>eralizations<br />
possible using multidim<strong>en</strong>sional<br />
Brownian motion.<br />
Rich vari<strong>et</strong>y of mo<strong>de</strong>ls.<br />
The infinite divisibility of a<br />
giv<strong>en</strong> mo<strong>de</strong>l may be difficult<br />
to prove.
1.4. PRICING EUROPEAN OPTIONS 49<br />
Proposition 1.9 (Carr and Madan [23]). L<strong>et</strong> {X t } t≥0 be a real-valued Lévy process satisfying<br />
the martingale condition (1.2), such that<br />
E[e (1+α)Xt ] < ∞ (1.23)<br />
for some α > 0. Th<strong>en</strong> the Fourier transform in log-strike k of the time value of a call option is<br />
giv<strong>en</strong> by:<br />
ζ T (v) :=<br />
∫ +∞<br />
−∞<br />
e ivk z T (k)dk = e ivrT Φ T (v − i) − 1<br />
iv(1 + iv)<br />
(1.24)<br />
Remark 1.3. Since typically Φ T (z) → 0 as Rz → ∞, ζ T (v) will behave like |v| −2 at infinity which<br />
means that the truncation error in the numerical evaluation of the inverse Fourier transform<br />
will be large. The reason of such a slow converg<strong>en</strong>ce is that the time value (1.22) is not smooth;<br />
therefore its Fourier transform does not <strong>de</strong>cay suffici<strong>en</strong>tly fast at infinity. For most mo<strong>de</strong>ls<br />
the converg<strong>en</strong>ce can be improved by replacing the time value with a smooth function of strike.<br />
Instead of subtracting the (non-differ<strong>en</strong>tiable) intrinsic value of the option from its price, we<br />
suggest to subtract the Black-Scholes call price with a non-zero volatility (which is a smooth<br />
function). The resulting function will be both integrable and smooth. Suppose that hypothesis<br />
(1.23) is satisfied and <strong>de</strong>note<br />
˜z T (k) = e −rT E[(e rT +X T<br />
− e k ) + ] − C Σ BS(k),<br />
where CBS Σ (k) is the Black-Scholes price of a call option with volatility Σ and log-strike k for<br />
the same un<strong>de</strong>rlying value and the same interest rate. Proposition 1.9 th<strong>en</strong> implies that the<br />
Fourier transform of ˜z T (k), <strong>de</strong>noted by ˜ζ T (v), satisfies<br />
˜ζ T (v) = e ivrT Φ T (v − i) − Φ Σ T<br />
(v − i)<br />
, (1.25)<br />
iv(1 + iv)<br />
where Φ Σ T (v) = exp(− Σ2 T<br />
2 (v2 + iv)). Since for most exp-Lévy mo<strong>de</strong>ls found in the literature<br />
(except variance gamma) the characteristic function <strong>de</strong>cays faster than every power of its argum<strong>en</strong>t<br />
at infinity, this means that the expression (1.25) will also <strong>de</strong>cay faster than every power<br />
of v as Rv → ∞, and the truncation error in the numerical evaluation of the inverse Fourier<br />
transform will be very small for every Σ > 0.<br />
Figure 1.1 shows the behavior of |˜ζ T | for differ<strong>en</strong>t values of Σ compared to the behavior of<br />
|ζ T | in Merton’s jump-diffusion mo<strong>de</strong>l with volatility 0.2, jump int<strong>en</strong>sity equal to 5 and jump
50 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
0.035<br />
0.03<br />
No smoothing<br />
Σ=0.2<br />
Σ=0.3575<br />
10 −2<br />
10 0 No smoothing<br />
0.025<br />
0.02<br />
0.015<br />
0.01<br />
10 −4<br />
10 −6<br />
10 −8<br />
10 −10<br />
10 −12<br />
Σ=0.2<br />
Σ=0.3575<br />
0.005<br />
10 −14<br />
0<br />
−50 0 50<br />
10 −16<br />
−50 0 50<br />
Figure 1.1: Converg<strong>en</strong>ce of Fourier transform of option’s time value to zero in Merton mo<strong>de</strong>l.<br />
Left graph: linear scale; right graph: logarithmic scale.<br />
param<strong>et</strong>ers µ = −0.1 and δ = 0.1 for the time horizon T = 0.5. The converg<strong>en</strong>ce of ˜ζ T to zero<br />
is faster than expon<strong>en</strong>tial for all values of Σ and it is particularly good for Σ = 0.3575, the<br />
value of Σ for which ˜ζ(0) = 0.<br />
Proof of Proposition 1.9. Since the discounted price process is a martingale,<br />
∫ ∞<br />
z T (k) = e −rT µ T (dx)(e rT +x − e k )(1 k≤x+rT − 1 k≤rT ),<br />
−∞<br />
where µ T is the probability distribution of X T . Condition (1.23) <strong>en</strong>ables us to compute ζ T (v)<br />
by interchanging integrals:<br />
ζ T (v) = e −rT ∫ ∞<br />
−∞<br />
−∞<br />
∫ ∞<br />
dk<br />
µ T (dx)e ivk (e rT +x − e k )(1 k≤x+rT − 1 k≤rT )<br />
−∞<br />
∫ rT<br />
∫ ∞<br />
= e −rT µ T (dx) e ivk (e k − e rT +x )dk<br />
−∞<br />
x+rT<br />
∫ {<br />
}<br />
∞<br />
e ivrT (1 − e x )<br />
= µ T (dx)<br />
−<br />
ex+ivrT<br />
iv + 1 iv(iv + 1) + e(iv+1)x+ivrT<br />
iv(iv + 1)<br />
The first term in braces disappears due to the martingale condition and the other two, after<br />
computing the integrals, yield (1.24).
1.4. PRICING EUROPEAN OPTIONS 51<br />
Numerical Fourier inversion.<br />
the inverse Fourier transform of ˜ζ T :<br />
Option prices can be computed by evaluating numerically<br />
˜z T (k) = 1<br />
2π<br />
∫ +∞<br />
−∞<br />
e −ivk ˜ζT (v)dv (1.26)<br />
This integral can be effici<strong>en</strong>tly computed for a range of strikes using the Fast Fourier transform,<br />
an algorithm due to Cooley and Tukey [29] which allows to compute the discr<strong>et</strong>e Fourier<br />
transform DFT[f] n=0 N−1 , <strong>de</strong>fined by,<br />
DFT[f] n :=<br />
using only O(N log N) operations.<br />
N−1<br />
∑<br />
k=0<br />
f k e −2πink/N , n = 0 . . . N − 1, (1.27)<br />
To approximate option prices, we truncate and discr<strong>et</strong>ize the integral (1.26) as follows:<br />
∫<br />
1 ∞<br />
e −ivk ˜ζT (v)dv = 1 ∫ L/2<br />
e −ivk ˜ζT (v)dv + ε T<br />
2π −∞<br />
2π −L/2<br />
=<br />
N−1<br />
L ∑<br />
w m ˜ζT (v m )e −ikvm + ε T + ε D , (1.28)<br />
2π(N − 1)<br />
where ε T is the truncation error, ε D is the discr<strong>et</strong>ization error, v m = −L/2+m∆, ∆ = L/(N −1)<br />
is the discr<strong>et</strong>ization step and w m are weights, corresponding to the chos<strong>en</strong> integration rule (for<br />
instance, for the trapezoidal rule w 0 = w N−1 = 1/2 and all other weights are equal to 1).<br />
Now, choosing k n = k 0 + 2πn<br />
N∆<br />
transform:<br />
N−1<br />
L<br />
∑<br />
2π(N − 1) eiknL/2 w m ˜ζT (k m )e −ik0m∆ e −2πinm/N<br />
m=0<br />
m=0<br />
we see that the sum in the last term becomes a discr<strong>et</strong>e Fourier<br />
=<br />
L<br />
2π(N − 1) eiknL/2 DFT n [w m ˜ζT (k m )e −ik 0m∆ ]<br />
Therefore, the FFT algorithm allows to compute ˜z T and option prices for the log strikes k n =<br />
k 0 + 2πn<br />
N∆<br />
. The log strikes are thus equidistant with the step d satisfying<br />
d∆ = 2π<br />
N .<br />
Error control.<br />
We start with the truncation error.<br />
Lemma 1.10. L<strong>et</strong> {X t } t≥0 be a Lévy process with characteristic tripl<strong>et</strong> (A, ν, γ) and characteristic<br />
function Φ T . Th<strong>en</strong>
52 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
1. ∀ v ∈ R, |Φ T (v − i)| ≤ exp(− T Av2<br />
2<br />
).<br />
2. Suppose that ν has a <strong>de</strong>nsity of the form ν(x) = e−x<br />
|x|<br />
f(x), where f is increasing on (−∞, 0)<br />
and <strong>de</strong>creasing on (0, ∞). Th<strong>en</strong> |Φ T (v − i)| is increasing on v ∈ (−∞, 0) and <strong>de</strong>creasing<br />
on v ∈ (0, ∞).<br />
Proof. The martingale condition implies that ∀ v ∈ R,<br />
|Φ T (v − i)| = exp<br />
{− T ∫ ∞<br />
}<br />
Av2 − e x (1 − cos(vx))ν(dx) . (1.29)<br />
2<br />
This immediately <strong>en</strong>tails the first part of the lemma. For the second part, l<strong>et</strong> 0 > v 1 > v 2 (the<br />
case v 1 < v 2 < 0 can be shown in the same way). Th<strong>en</strong>, for all t ∈ R,<br />
Therefore,<br />
∫ ∞<br />
−∞<br />
e x (1 − cos v 1 x)ν(dx) =<br />
∫ ∞<br />
−∞<br />
e t/v 1<br />
ν(t/v 1 )<br />
v 1<br />
≤ <strong>et</strong>/v 2<br />
ν(t/v 2 )<br />
v 2<br />
.<br />
(1 − cos t) <strong>et</strong>/v 1<br />
ν(t/v 1 )<br />
dt<br />
−∞<br />
∫ ∞<br />
≤<br />
−∞<br />
v 1<br />
(1 − cos t) <strong>et</strong>/v 2<br />
ν(t/v 2 )<br />
v 2<br />
dt =<br />
and it follows from Equation (1.29) that |Φ T (v 1 − i)| ≥ |Φ T (v 2 − i)|.<br />
∫ ∞<br />
−∞<br />
e x (1 − cos v 2 x)ν(dx),<br />
Proposition 1.11. L<strong>et</strong> {X t } t≥0 be a real-valued Lévy process with tripl<strong>et</strong> (A, ν, γ) and characteristic<br />
function Φ T and l<strong>et</strong> Σ > 0.<br />
1. Suppose A > 0. Th<strong>en</strong> the truncation error in Equation (1.28) satisfies:<br />
|ε T | ≤<br />
8<br />
πT Σ 2 L 3 e− T L2 Σ 2 8<br />
8 +<br />
πT AL 3 e− T L2 A<br />
8 . (1.30)<br />
2. Suppose that ν has a <strong>de</strong>nsity of the form ν(x) = e−x<br />
|x|<br />
f(x), where f is increasing on (−∞, 0)<br />
and <strong>de</strong>creasing on (0, ∞). Th<strong>en</strong> the truncation error in Equation (1.28) satisfies:<br />
Proof. From Equation, (1.28),<br />
|ε T | ≤ 1 ∫ ∞<br />
|˜ζ T (v)|dv + 1<br />
2π L/2<br />
2π<br />
≤ 1 ∫<br />
2π<br />
8<br />
|ε T | ≤<br />
πT Σ 2 L 3 e− T L2 Σ 2<br />
8 + |Φ T (L/2 − i)| + |Φ T (−L/2 − i)|<br />
.<br />
πL<br />
∫ −L/2<br />
−∞<br />
(−∞,−L/2)∪(L/2,∞)<br />
|˜ζ T (v)|dv<br />
|Φ T (v − i)|dv<br />
v 2 + 1 ∫<br />
|Φ Σ T<br />
(v − i)|dv<br />
2π (−∞,−L/2)∪(L/2,∞) v 2 .
1.4. PRICING EUROPEAN OPTIONS 53<br />
By the first part of Lemma 1.10,<br />
∫<br />
1 ∞<br />
|Φ T (v − i)|<br />
2π L/2 v 2 dv ≤ 1 ∫ ∞<br />
dv<br />
2π L/2 v 2 e−T Av2 /2 = 1 ∫ ∞<br />
4π L 2 /4<br />
≤ 1<br />
4π<br />
dz Az/2<br />
e−T<br />
z3/2 ∫<br />
8 ∞<br />
L 3 dze −T Az/2 =<br />
L 2 /4<br />
4<br />
πT AL 3 e− L2 AT<br />
8 ,<br />
and since a similar bound can be obtained for Φ Σ T<br />
, this proves the first part of the proposition.<br />
To prove the second statem<strong>en</strong>t, observe that from the second part of Lemma 1.10,<br />
∫<br />
1 ∞<br />
2π L/2<br />
|Φ T (v − i)|<br />
v 2 dv ≤ |Φ ∫<br />
T (L/2 − i)| ∞<br />
dv<br />
2π L/2<br />
v 2 = |Φ T (L/2 − i)|<br />
.<br />
πL<br />
To compute a bound for the discr<strong>et</strong>ization (sampling) error ε D in Equation (1.28), we <strong>de</strong>fine<br />
constants C k , k ≥ 1 by<br />
⎧<br />
⎪⎨<br />
C k =<br />
⎪⎩<br />
|Φ (k)<br />
T<br />
(−i)|, k is ev<strong>en</strong>,<br />
|Φ (k+1)<br />
T<br />
(−i)| k<br />
k+1 , k is odd,<br />
(1.31)<br />
and start by proving a technical lemma.<br />
Lemma 1.12. L<strong>et</strong> {X t } t≥0 be a real-valued Lévy process with tripl<strong>et</strong> (A, ν, γ) and characteristic<br />
function Φ T , such that the condition (1.23) is satisfied. L<strong>et</strong> Γ T (v) := Φ T (v−i)−1<br />
v<br />
. Th<strong>en</strong> for all<br />
n ≥ 0,<br />
|Γ (n)<br />
T (v)| ≤ C n+1<br />
n + 1<br />
∀ v ∈ R<br />
Proof. Un<strong>de</strong>r the condition (1.23), for all n ≥ 1, E[|X T | n e X T<br />
] < ∞. Therefore, by Lebesgue’s<br />
dominated converg<strong>en</strong>ce theorem, for all n ≥ 1,<br />
Φ (n)<br />
T<br />
∫ ∞<br />
(v − i) = (ix) n e i(v−i)x µ T (dx),<br />
where µ T is the probability distribution of X T . For ev<strong>en</strong> n > 1 this implies:<br />
−∞<br />
∫ ∞<br />
|Φ (n)<br />
T<br />
(v − i)| ≤ x n e x µ T (dx) = C n ,<br />
−∞<br />
and for odd n ≥ 1, using J<strong>en</strong>s<strong>en</strong>’s inequality for the probability measure ˜µ T = e x µ T yields:<br />
∫ ∞<br />
(∫ ∞<br />
) n<br />
|Φ (n)<br />
T<br />
(v − i)| ≤ |x| n e x µ T (dx) ≤ |x| n+1 e x n+1<br />
µ T (dx) = Cn ,<br />
−∞<br />
−∞
54 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS<br />
From the martingale condition,<br />
Γ T (v) = Φ T (v − i) − Φ T (−i)<br />
v<br />
=<br />
∫ 1<br />
0<br />
Φ ′ T (vt − i)dt.<br />
Applying the dominated converg<strong>en</strong>ce theorem once again, we conclu<strong>de</strong> that<br />
and therefore |Γ (n)<br />
T (v)| ≤ C n+1<br />
n+1<br />
Γ (n)<br />
T (v) = ∫ 1<br />
0<br />
for all n ≥ 0.<br />
t n Φ (n+1)<br />
T<br />
(vt − i)dt,<br />
Proposition 1.13. Suppose that the integral in (1.28) is approximated using the trapezoidal<br />
rule. Th<strong>en</strong> the discr<strong>et</strong>ization error ε D satisfies<br />
{<br />
2∑<br />
|ε D | ≤ ∆2 C 3−l + C3−l<br />
Σ (<br />
∆ + π 6π (3 − l)! 2<br />
l=0<br />
)<br />
e |k−rT | + log<br />
(<br />
L<br />
2 + √<br />
L 2<br />
4 + 1 )<br />
where C Σ k is computed as in (1.31) for the characteristic function ΦΣ T .<br />
}<br />
|k − rT | l<br />
, (1.32)<br />
l!<br />
If this integral is approximated using the Simpson rule, ε D satisfies<br />
{ (<br />
4∑<br />
|ε D | ≤ ∆4 C 5−l + C5−l<br />
Σ (<br />
2∆ + π √ ) }<br />
)<br />
e |k−rT | L L<br />
+ log<br />
5π (5 − l)!<br />
2<br />
2 + 2<br />
4 + 1 |k − rT | l<br />
, (1.33)<br />
l!<br />
l=0<br />
Proof. The trapezoidal rule (cf. [32]) is <strong>de</strong>fined by<br />
∫ x+h<br />
x<br />
f(ξ)dξ = 1 2 h(f(x) + f(x + h)) + R with R = − 1 12 h3 f ′′ (x ∗ )<br />
for some x ∗ ∈ [x, x + h]. The sampling error in (1.28) therefore satisfies:<br />
|ε D | ≤ ∆3 N−2<br />
∑<br />
24π<br />
= ∆3<br />
24π<br />
m=0 v∈[−L/2+m∆,−L/2+(m+1)∆]<br />
N−2<br />
∑<br />
m=0<br />
sup<br />
∂ 2<br />
∣∂v 2 e−ivk ˜ζT (v)<br />
∣<br />
{<br />
sup<br />
∂ 2<br />
∣ ∣∣∣<br />
∣∂v 2 e−ivk ζ T (v)<br />
∣ + sup ∂ 2<br />
}<br />
∂v 2 e−ivk ζT Σ (v)<br />
∣ , (1.34)<br />
where ζT Σ (v) := e ivrT ΦΣ T<br />
(v − i) − 1<br />
.<br />
iv(1 + iv)<br />
Observe that e −ivk ζ T (v) = e−iv(k−rT )<br />
i(1+iv)<br />
Γ T (v), and therefore<br />
∂ n<br />
∣∂v n (eivk ζ T (v))<br />
∣<br />
≤<br />
n∑<br />
l=0<br />
≤ n!<br />
|Γ (n−l)<br />
T<br />
n∑<br />
l=0<br />
n!<br />
(v)|<br />
(n − l)!<br />
C n−l+1<br />
(n − l + 1)!<br />
l∑ |k − rT | j (<br />
1<br />
√<br />
j! 1 + v 2<br />
j=0<br />
) l−j+1<br />
l∑ |k − rT | j ( )<br />
1 l−j+1<br />
√ := ˜g n (v).<br />
j! 1 + v 2<br />
j=0
1.4. PRICING EUROPEAN OPTIONS 55<br />
Since the bound ˜g n (v) is increasing on (−∞, 0) and <strong>de</strong>creasing on (0, ∞),<br />
∆ 3 N−2<br />
∑<br />
sup<br />
∂ 2<br />
∫ L/2<br />
24π ∣∂v 2 e−ivk ζ T (v)<br />
∣ ≤ ∆3<br />
12π ˜g 2(0) + ∆2<br />
24π<br />
m=0<br />
−L/2<br />
⎧<br />
2∑<br />
≤ ∆2 C<br />
⎨<br />
3−l<br />
l∑<br />
12π (3 − l)! ⎩ 2∆ |k − rT | j ∑l−1<br />
|k − rT | j<br />
+<br />
j!<br />
j!<br />
≤ ∆2<br />
6π<br />
l=0<br />
2∑<br />
l=0<br />
j=0<br />
j=0<br />
{<br />
C (<br />
3−l<br />
∆ + π )<br />
e |k−rT | + log<br />
(3 − l)! 2<br />
˜g 2 (v)dv<br />
∫ L/2<br />
−L/2<br />
(<br />
L<br />
2 + √<br />
L 2<br />
4 + 1 )<br />
dv |k − rT |l<br />
+<br />
1 + v2 l!<br />
}<br />
|k − rT | l<br />
l!<br />
.<br />
∫ L/2<br />
−L/2<br />
⎫<br />
dv<br />
⎬<br />
√<br />
1 + v 2 ⎭<br />
To compl<strong>et</strong>e the proof of (1.32) it remains to substitute this bound and a similar bound for<br />
∆<br />
∑<br />
∣ ∣ 3 N−2 ∣∣<br />
24π m=0 sup ∂ 2<br />
e −ivk ζ Σ ∣∣<br />
∂v 2 T (v) into (1.34).<br />
The Simpson rule (cf. [32]) is <strong>de</strong>fined by:<br />
∫ x+2h<br />
x<br />
f(ξ)dξ = 1 h(f(x) + 4f(x + h) + f(x + 2h)) + R,<br />
3<br />
where R = 1<br />
90 h4 f (4) (x ∗ )<br />
for some x ∗ ∈ [x, x + 2h]. The proof of (1.33) can be carried out in the same way as for the<br />
trapezoidal rule.<br />
Example 1.1. L<strong>et</strong> us compute the truncation and discr<strong>et</strong>ization errors in the Merton mo<strong>de</strong>l<br />
(1.16) with param<strong>et</strong>ers σ = 0.1, λ = 2, δ = 0.1, µ = 0 for options with maturity T = 0.25.<br />
Taking Σ = 0.1, we obtain the following values of the coeffici<strong>en</strong>ts C k and C Σ k :<br />
k C k Ck<br />
Σ<br />
1 0.0871 0.05<br />
2 0.0076 0.0025<br />
3 0.0024 2.85 · 10 −4<br />
4 3.29 · 10 −4 1.88 · 10 −5<br />
5 1.82 · 10 −4 2.99 · 10 −6<br />
With 4048 points and the log strike step d equal to 0.01, the truncation error is extremely small:<br />
ε T = 2 · 10 −59 , and the discr<strong>et</strong>ization error for at the money options is giv<strong>en</strong> by ε D = 0.0013<br />
for the trapezoidal rule and by ε D = 3.8 · 10 −5 for the Simpson rule. Since the call option price<br />
in this s<strong>et</strong>ting (S = K = 1, r = q = 0) is C = 0.0313, we conclu<strong>de</strong> that the Simpson rule gives<br />
an acceptable pricing error for this choice of param<strong>et</strong>ers.
56 CHAPTER 1. LEVY PROCESSES AND EXP-LEVY MODELS
Chapter 2<br />
The calibration problem and its<br />
regularization<br />
This chapter lays the theor<strong>et</strong>ical foundations of our calibration m<strong>et</strong>hod. Discr<strong>et</strong>ization of the<br />
regularized calibration problem and numerical implem<strong>en</strong>tation of the calibration algorithm are<br />
addressed in the next chapter.<br />
The calibration problem consists, roughly speaking, of finding a risk-neutral expon<strong>en</strong>tial<br />
Lévy mo<strong>de</strong>l consist<strong>en</strong>t with mark<strong>et</strong> prices of tra<strong>de</strong>d options {C M (T i , K i )} i∈I for some in<strong>de</strong>x s<strong>et</strong><br />
I. In other words, the solution of the calibration problem is a probability Q on the path space<br />
(Ω, F), such that (X, Q) is a Lévy process, satisfying the martingale condition (1.2) and such<br />
that the option prices, computed using (1.14) are in some s<strong>en</strong>se close to mark<strong>et</strong> prices C M .<br />
Suppose first that the mark<strong>et</strong> data C M are consist<strong>en</strong>t with the class of expon<strong>en</strong>tial Lévy<br />
mo<strong>de</strong>ls. This is for example the case wh<strong>en</strong> the true mo<strong>de</strong>l un<strong>de</strong>rlying mark<strong>et</strong> data is an expon<strong>en</strong>tial<br />
Lévy mo<strong>de</strong>l, but this is not the only situation where the above is true: many mo<strong>de</strong>ls<br />
may give the same prices for a giv<strong>en</strong> s<strong>et</strong> of European options. For instance, it is easy to construct,<br />
using Dupire’s formula, a local volatility mo<strong>de</strong>l that gives the same prices, for a s<strong>et</strong> of<br />
European options, as a giv<strong>en</strong> exp-Lévy mo<strong>de</strong>l. D<strong>en</strong>oting by L the s<strong>et</strong> of all probabilities Q<br />
such that (X, Q) is a Lévy process and by M the s<strong>et</strong> of probabilities Q such that {e Xt } t≥0 is a<br />
Q-martingale, the calibration problem assumes the following form:<br />
57
58 CHAPTER 2. THE CALIBRATION PROBLEM<br />
Calibration problem for data, consist<strong>en</strong>t with exp-Lévy mo<strong>de</strong>l.<br />
of call options {C M (T i , K i )} i∈I , find Q ∗ ∈ M ∩ L, such that<br />
Giv<strong>en</strong> mark<strong>et</strong> prices<br />
∀i ∈ I, C Q∗ (T i , K i ) = C M (T i , K i ). (2.1)<br />
In most cases, however, Equations (2.1) cannot be solved exactly, either because the observed<br />
option prices contain errors or because the mark<strong>et</strong> in question cannot be <strong>de</strong>scribed by an<br />
expon<strong>en</strong>tial Lévy mo<strong>de</strong>l. In this case a common practice is to replace the exact constraints<br />
(2.1) by a nonlinear least squares calibration problem. Section 2.1 takes a critical look at<br />
this approach and establishes some limits of its applicability to non-param<strong>et</strong>ric calibration of<br />
expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls.<br />
An important difficulty of least squares calibration is its lack of i<strong>de</strong>ntification, meaning<br />
that a finite number of observed option prices does not allow to reconstruct the law of a Lévy<br />
process in a unique fashion. To address this issue, we suggest, in Section 2.2 to reformulate<br />
the calibration problem as that of finding the risk-neutral expon<strong>en</strong>tial Lévy mo<strong>de</strong>l that has the<br />
smallest relative <strong>en</strong>tropy with respect to a giv<strong>en</strong> prior probability measure among all solutions<br />
of the least squares calibration problem. Section 2.3 reviews the literature on the use of relative<br />
<strong>en</strong>tropy for pricing and calibration and places the pres<strong>en</strong>t study into the context of previous<br />
work on this subject.<br />
The use of relative <strong>en</strong>tropy for selection of solutions removes to some ext<strong>en</strong>t the i<strong>de</strong>ntification<br />
problem but the resulting calibration problem is still ill-posed: small errors in mark<strong>et</strong> data may<br />
lead to large changes of its solution. The last section of this chapter uses the m<strong>et</strong>hod of<br />
regularization to approximate the solutions of this problem in a stable manner in pres<strong>en</strong>ce of<br />
data errors.<br />
2.1 Least squares calibration<br />
Wh<strong>en</strong> the mark<strong>et</strong> data is not consist<strong>en</strong>t with the class of expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls, the exact<br />
calibration problem may not have a solution. In this case one may consi<strong>de</strong>r an approximate<br />
solution: instead of reproducing the mark<strong>et</strong> option prices exactly, one may look for a Lévy tripl<strong>et</strong><br />
which reproduces them in the best possible way in the least squares s<strong>en</strong>se. L<strong>et</strong> w be a probability
2.1. LEAST SQUARES CALIBRATION 59<br />
measure on [0, T ∞ ] × [0, ∞) (the weighting measure, <strong>de</strong>termining the relative importance of<br />
differ<strong>en</strong>t options). An option data s<strong>et</strong> is <strong>de</strong>fined as a mapping C : [0, T ∞ ] × [0, ∞) → [0, ∞) and<br />
the data s<strong>et</strong>s that coinci<strong>de</strong> w-almost everywhere are consi<strong>de</strong>red i<strong>de</strong>ntical. One can introduce a<br />
norm on option data s<strong>et</strong>s via<br />
∫<br />
‖C‖ 2 w :=<br />
[0,T ∞]×[0,∞)<br />
C(T, K) 2 w(dT × dK). (2.2)<br />
The quadratic pricing error in mo<strong>de</strong>l Q is th<strong>en</strong> giv<strong>en</strong> by ‖C M − C Q ‖ 2 w. If the number of constraints<br />
is finite th<strong>en</strong> w = ∑ N<br />
i=1 w iδ (Ti ,K i )(dT × dK) (we suppose that there are N constraints),<br />
where {w i } 1≤i≤N are positive weights that sum up to one. Therefore, in this case<br />
‖C M − C Q ‖ 2 w =<br />
N∑<br />
w i (C M (T i , K i ) − C Q (T i , K i )) 2 . (2.3)<br />
i=1<br />
The calibration problem now takes the following form:<br />
Least squares calibration problem. Giv<strong>en</strong> prices C M of call options, find Q ∗ ∈ M ∩ L,<br />
such that<br />
‖C M − C Q∗ ‖ 2 w =<br />
inf ‖C M − C Q ‖ 2 w. (2.4)<br />
Q∈M∩L<br />
In the sequel, any such Q ∗ will be called a least squares solution and the s<strong>et</strong> of all least<br />
squares solutions will be <strong>de</strong>noted by Q LS .<br />
Several authors (see for example [2, 10]) have used the form (2.4) without taking into account<br />
that the least squares calibration problem is ill-posed in several ways. The principal difficulties<br />
of theor<strong>et</strong>ical nature are the lack of i<strong>de</strong>ntification (knowing the prices of a finite number of<br />
options is not suffici<strong>en</strong>t to reconstruct the Lévy process), abs<strong>en</strong>ce of solution (in some cases<br />
ev<strong>en</strong> the least squares problem may not admit a solution) and abs<strong>en</strong>ce of continuity of solution<br />
with respect to mark<strong>et</strong> data. On the other hand, ev<strong>en</strong> if a solution exists, it is very difficult to<br />
find numerically, because the functional ‖C M −C Q ‖ 2 is typically non-convex and has many local<br />
minima, prev<strong>en</strong>ting a gradi<strong>en</strong>t-based minimization algorithm from finding the true solution. In<br />
the rest of this section we discuss these difficulties in <strong>de</strong>tail.
60 CHAPTER 2. THE CALIBRATION PROBLEM<br />
2.1.1 Lack of i<strong>de</strong>ntification<br />
If the data are consist<strong>en</strong>t with an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l and call option prices are known for<br />
one maturity and all strikes, the characteristic tripl<strong>et</strong> of the un<strong>de</strong>rlying Lévy process could be<br />
<strong>de</strong>duced in the following way:<br />
• Compute the characteristic function Φ T<br />
Equation (1.24).<br />
of log stock price by Fourier transform as in<br />
• Deduce the unit variance of the Gaussian compon<strong>en</strong>t A and the Lévy measure ν from the<br />
characteristic function Φ T . First, A can be found as follows (see [87, page 40]):<br />
Now, <strong>de</strong>noting ψ(u) ≡ log Φ T (u)<br />
T<br />
∫ 1<br />
−1<br />
A = lim<br />
u→∞ −2 log Φ T (u)<br />
T u 2 (2.5)<br />
+ Au2<br />
2<br />
, it can be shown (see Equation (8.10) in [87]) that<br />
∫ ∞<br />
(ψ(u) − ψ(u + z))dz = 2<br />
−∞<br />
e iux (1 − sin x )ν(dx) (2.6)<br />
x<br />
Therefore, the left-hand si<strong>de</strong> of (2.6) is the Fourier transform of the positive finite measure<br />
2(1 − sin x<br />
x<br />
)ν(dx). This means that this measure, and, consequ<strong>en</strong>tly, the Lévy measure ν<br />
is uniquely <strong>de</strong>termined by ψ.<br />
However, call prices are only available for a finite number of strikes. This number may be quite<br />
small (b<strong>et</strong>we<strong>en</strong> 10 and 40 in real examples). Therefore, the above procedure cannot be applied<br />
and ν and A must be computed by minimizing the pricing error ‖C M − C Q ‖ 2 w. Giv<strong>en</strong> that<br />
the number of calibration constraints (option prices) is finite and not very large, there may be<br />
many Lévy tripl<strong>et</strong>s which reproduce call prices with equal precision. This means that the error<br />
landscape may have flat regions in which the error has a low s<strong>en</strong>sitivity to variations in A and<br />
ν.<br />
One may think that in a param<strong>et</strong>ric mo<strong>de</strong>l with few param<strong>et</strong>ers one will not <strong>en</strong>counter this<br />
problem since there are (many) more options than param<strong>et</strong>ers. This is not true, as illustrated by<br />
the following empirical example. Figure 2.1 repres<strong>en</strong>ts the magnitu<strong>de</strong> of the quadratic pricing<br />
error for the Merton mo<strong>de</strong>l (1.16) on a data s<strong>et</strong> of DAX in<strong>de</strong>x options, as a function of the<br />
diffusion coeffici<strong>en</strong>t σ and the jump int<strong>en</strong>sity λ, other param<strong>et</strong>ers remaining fixed. It can be<br />
observed that if one increases the diffusion volatility while simultaneously <strong>de</strong>creasing the jump
2.1. LEAST SQUARES CALIBRATION 61<br />
int<strong>en</strong>sity in a suitable manner, the calibration error changes very little: there is a long “valley”<br />
in the error landscape (highlighted by the dashed white line in Figure 2.1). A gradi<strong>en</strong>t <strong>de</strong>sc<strong>en</strong>t<br />
m<strong>et</strong>hod will typically succeed in locating the valley but will stop at a more or less random point<br />
in it. At first glance this does not seem to be too much of a problem: since the algorithm finds<br />
the valley’s bottom, the best calibration quality will be achieved anyway. However, after a small<br />
change in option prices, the outcome of this calibration algorithm may shift a long way along<br />
the valley. This means that if the calibration is performed every day, one may come up with<br />
wildly oscillating param<strong>et</strong>ers of the Lévy process, leading to important changes in the quantities<br />
computed from these param<strong>et</strong>ers, like prices of exotic options, ev<strong>en</strong> if the mark<strong>et</strong> option prices<br />
change very little.<br />
3<br />
x 10 5<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
2<br />
1.5<br />
1<br />
λ<br />
0.5<br />
0<br />
0.1<br />
0.12<br />
0.14<br />
σ<br />
0.16<br />
0.18<br />
0.2<br />
Figure 2.1: Sum of squared differ<strong>en</strong>ces b<strong>et</strong>we<strong>en</strong> mark<strong>et</strong> prices (DAX options maturing in 10<br />
weeks) and mo<strong>de</strong>l prices in Merton mo<strong>de</strong>l, as a function of param<strong>et</strong>ers σ and λ the other ones<br />
being fixed. Dashed white line shows the “valley” along which the error function changes very<br />
little.<br />
Figure 2.2 illustrates the same problem in the non-param<strong>et</strong>ric s<strong>et</strong>ting. The two graphs<br />
repres<strong>en</strong>t the result of a non-linear least squares minimization where the variable is the vector<br />
of discr<strong>et</strong>ized values of ν on a grid (see Section 3.1). In both cases the same option prices are<br />
used, the only differ<strong>en</strong>ce being the starting points of the optimization routines. In the first case<br />
(solid line) a Merton mo<strong>de</strong>l with int<strong>en</strong>sity λ = 1 is used and in the second case (dashed line)
62 CHAPTER 2. THE CALIBRATION PROBLEM<br />
we used a Merton mo<strong>de</strong>l with int<strong>en</strong>sity λ = 5. As can be se<strong>en</strong> in Figure 2.2 (left graph), the<br />
results of the minimization are totally differ<strong>en</strong>t! However, although the calibrated measures are<br />
differ<strong>en</strong>t, the prices that they correspond to are almost the same (see Figure 2.2, right graph),<br />
and the final values of the calibration functional for the two curves differ very little.<br />
The i<strong>de</strong>ntification problem will be addressed in the next section by adding information in<br />
the form of a prior Lévy process to the calibration problem.<br />
20<br />
18<br />
λ 0<br />
= 1, ε = 0.154<br />
λ 0<br />
= 5, ε = 0.153<br />
1.1<br />
1<br />
mark<strong>et</strong><br />
λ 0<br />
= 1<br />
λ 0<br />
=5<br />
16<br />
0.9<br />
14<br />
0.8<br />
12<br />
0.7<br />
10<br />
0.6<br />
8<br />
0.5<br />
6<br />
0.4<br />
4<br />
0.3<br />
2<br />
0.2<br />
0<br />
−1.2 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6<br />
0.1<br />
3500 4000 4500 5000 5500 6000 6500 7000 7500<br />
Figure 2.2: Left: Lévy measures calibrated to DAX option prices, maturity 3 months via nonlinear<br />
least squares m<strong>et</strong>hod. The starting jump measure for both graphs is Gaussian; the jump<br />
int<strong>en</strong>sity λ 0 is initialized to 1 for the solid curve and to 5 for the dashed one. ε <strong>de</strong>notes the<br />
value of the calibration functional wh<strong>en</strong> the gradi<strong>en</strong>t <strong>de</strong>sc<strong>en</strong>t algorithm stops. Right: implied<br />
volatility smiles corresponding to these two measures.<br />
2.1.2 Exist<strong>en</strong>ce of solutions<br />
In this section, we will first give an (artificial) example which shows that the least squares<br />
formulation (2.4) does not in g<strong>en</strong>eral guarantee the exist<strong>en</strong>ce of solution. However, un<strong>de</strong>r<br />
additional conditions we are able to prove the exist<strong>en</strong>ce of a solution of the least squares<br />
calibration problem.<br />
Example 2.1. Suppose that S 0 = 1, there are no interest rates or divi<strong>de</strong>nds and the (equally<br />
weighted) mark<strong>et</strong> data consist of the following two observations:<br />
C M (T = 1, K = 1) = 1 − e −λ and C M (T = 1, K = e λ ) = 0, (2.7)
2.1. LEAST SQUARES CALIBRATION 63<br />
with some λ > 0. It is easy to see that these prices are, for example, compatible with the<br />
(martingale) ass<strong>et</strong> price process S t = e λt 1 t≤τ1 , where τ 1 is the time of the first jump of a<br />
Poisson process with int<strong>en</strong>sity λ. We will show that if the mark<strong>et</strong> data are giv<strong>en</strong> by (2.7), the<br />
calibration problem (2.4) does not admit a solution.<br />
Abs<strong>en</strong>ce of arbitrage implies that in every risk-neutral mo<strong>de</strong>l Q, for fixed T , C Q (T, K) is a<br />
convex function of K and that C Q (T, K = 0) = 1. The only convex function which satisfies this<br />
equality and passes through the mark<strong>et</strong> data points (2.7) is giv<strong>en</strong> by C(T = 1, K) = (1−Ke −λ ) + .<br />
Therefore, in every arbitrage-free mo<strong>de</strong>l that is an exact solution of the calibration problem with<br />
mark<strong>et</strong> data (2.7), for every K ≥ 0, P [S 1 ≤ K] = e −λ 1 K≤e λ. Since in an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l<br />
P [S 1 > 0] = 1, there is no risk-neutral expon<strong>en</strong>tial Lévy mo<strong>de</strong>l for which ‖C M − C Q ‖ w = 0.<br />
On the other hand, inf Q∈M∩L ‖C M − C Q ‖ 2 w = 0. In<strong>de</strong>ed, l<strong>et</strong> {N t } t≥0 be a Poisson process<br />
with int<strong>en</strong>sity λ. Th<strong>en</strong> for every n, the process<br />
X n t := −nN t + λt(1 − e −n ) (2.8)<br />
belongs to M ∩ L and<br />
lim<br />
n→∞ E[(eXn t<br />
− K) + ] = lim<br />
∞∑<br />
n→∞<br />
k=0<br />
(<br />
−λt (λt)k<br />
+<br />
e e −nk+λt(1−e−n) − K)<br />
= (1 − Ke −λt ) + .<br />
k!<br />
We have shown that inf Q∈M∩L ‖C M − C Q ‖ 2 = 0 and that for no Lévy process Q ∈ M ∩ L,<br />
‖C M − C Q ‖ 2 = 0. Tog<strong>et</strong>her this <strong>en</strong>tails that the calibration problem (2.4) does not admit a<br />
solution.<br />
This example makes clear that to solve the calibration problem (2.4), we must at least<br />
impose a bound on the jumps of the solution. The following theorem provi<strong>de</strong>s an exist<strong>en</strong>ce<br />
result un<strong>de</strong>r this and another important condition (informally speaking, to control the variance<br />
of the solution we need to find a Lévy process for which the pricing error is already suffici<strong>en</strong>tly<br />
low). In the theorem and below L B <strong>de</strong>notes the s<strong>et</strong>s of all probabilities P ∈ L such that<br />
P [|∆X t | ≤ B ∀t : 0 ≤ t ≤ T ∞ ] = 1.<br />
Theorem 2.1. Suppose that for some Q 0 ∈ M ∩ L B and some couple (T 0 , K 0 ) with nonzero<br />
weight w 0 := w({T 0 , K 0 }) > 0,<br />
‖C Q 0<br />
− C M ‖ w < √ w 0 (S 0 − C M (T 0 , K 0 )). (2.9)
64 CHAPTER 2. THE CALIBRATION PROBLEM<br />
Th<strong>en</strong> the problem (2.4) has a solution in M ∩ L B : there exists Q ∗ ∈ M ∩ L B , such that<br />
‖C M − C Q∗ ‖ 2 w =<br />
The proof is based on the following lemmas.<br />
inf ‖C M − C Q ‖ 2 w.<br />
Q∈M∩L B<br />
Lemma 2.2. The pricing error functional Q ↦→ ‖C M − C Q ‖ 2 w, <strong>de</strong>fined by (2.2), is uniformly<br />
boun<strong>de</strong>d and weakly continuous on M ∩ L.<br />
Proof. From Equation (1.14), C Q (T, K) ≤ S 0 . Abs<strong>en</strong>ce of arbitrage in the mark<strong>et</strong> implies that<br />
the mark<strong>et</strong> option prices satisfy the same condition. Therefore, (C M (T, K) − C Q (T, K)) 2 ≤ S0<br />
2<br />
and since w is a probability measure, ‖C M − C Q ‖ 2 w ≤ S0 2.<br />
L<strong>et</strong> {Q n } n≥1 ⊂ M ∩ L and Q ∈ M ∩ L be such that Q n ⇒ Q. For all T, K,<br />
lim<br />
n<br />
C Qn (T, K) = e −rT lim<br />
n<br />
E Qn [(S 0 e rT +X T<br />
− K) + ]<br />
= e −rT lim<br />
n<br />
E Qn [S 0 e rT +X T<br />
− K] + e −rT lim<br />
n<br />
E Qn [(K − S 0 e rT +X T<br />
) + ]<br />
= S 0 − Ke −rT + e −rT E Q [(K − S 0 e rT +X T<br />
) + ] = C Q (T, K).<br />
Therefore, by the dominated converg<strong>en</strong>ce theorem, ‖C M − C Qn ‖ 2 w → ‖C M − C Q ‖ 2 w.<br />
Lemma 2.3. For all B > 0, T > 0, K > 0 and all C with 0 < C < S 0 , the s<strong>et</strong> of Lévy processes<br />
Q ∈ M ∩ L B satisfying C Q (T, K) ≤ C is relatively weakly compact.<br />
Proof. By Prohorov’s theorem, weak relative compactness is implied by the tightness of this<br />
family of probability measures. Since the jumps are boun<strong>de</strong>d, to prove the tightness, by Proposition<br />
1.6 it is <strong>en</strong>ough to show that there exist constants C 1 and C 2 such that for every Lévy<br />
process Q ∈ M∩L B such that C Q (T, K) ≤ C, its characteristic tripl<strong>et</strong> (A, ν, γ) satisfies |γ| ≤ C 1<br />
and A + ∫ 1<br />
−1 x2 ν(dx) ≤ C 2 .<br />
By the risk-neutrality condition (1.2),<br />
γ = − A ∫ B<br />
2 − (e x − 1 − x1 |x|≤1 )ν(dx)<br />
−B<br />
It is easy to see that |e x − 1 − x1 |x|≤1 | ≤ e B∧1 x 2<br />
e B∧1 (A + ∫ ∞<br />
−∞ x2 ν(dx)).<br />
for x ∈ (−∞, B] and therefore |γ| ≤<br />
This means that to prove the lemma, it is suffici<strong>en</strong>t to show that
2.1. LEAST SQUARES CALIBRATION 65<br />
A + ∫ ∞<br />
−∞ x2 ν(dx) < C 3 for some constant C 3 , in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt on the choice of the Lévy process Q.<br />
Since for all α ∈ [0, 1], e x ∧ 1 ≤ e αx , we have:<br />
S 0 − C Q (T, K) = Ke −rT E[e X T −m ∧ 1] ≤ Ke −rT E[e α(X T −m) ] = S α 0 (Ke −rT ) 1−α E[e αX T<br />
],<br />
where m = log(Ke −rT /S 0 ). The right-hand si<strong>de</strong> can be computed using the Lévy-Khintchine<br />
formula:<br />
E[e αX T<br />
] = exp T<br />
{<br />
− A 2 (α − α2 ) −<br />
Choosing α = 1/2, the above reduces to<br />
E[e X T /2 ] = exp T {− A 8 − 1 2<br />
On the other hand, it is easy to check that<br />
and therefore<br />
A<br />
8 + 1 2<br />
∫ ∞<br />
−∞<br />
∫ ∞<br />
−∞<br />
∫ ∞<br />
}<br />
(αe αx − e αx − α + 1)ν(dx) .<br />
−∞<br />
(e x/2 − 1) 2 ν(dx)}.<br />
(e x/2 − 1) 2 ν(dx) ≥ e−B<br />
8 (A + ∫ ∞<br />
−∞<br />
x 2 ν(dx))<br />
∫ √ √ ∞<br />
A + x 2 ν(dx) ≤ 8eB<br />
−∞<br />
T log S0 Ke −rT<br />
S 0 − C Q (T, K) ≤ 8eB<br />
T<br />
log S0 Ke −rT<br />
S 0 − C ,<br />
which finishes the proof of the lemma.<br />
In the following lemma, L + B <strong>de</strong>notes the s<strong>et</strong>s of all probabilities P ∈ L such that P [∆X t ≤<br />
B ∀t : 0 ≤ t ≤ T ∞ ] = 1.<br />
Lemma 2.4. Both M ∩ L B and M ∩ L + B<br />
are weakly closed for every B > 0.<br />
Proof. We give the proof for M ∩ L B ; the proof for M ∩ L + B<br />
can be done in a similar fashion.<br />
L<strong>et</strong> {Q n } ∞ n=1 ⊂ M ∩ L B with characteristic tripl<strong>et</strong>s (A n , ν n , γ h n) with respect to a continuous<br />
boun<strong>de</strong>d truncation function h, satisfying h(x) = x in a neighborhood of 0, and l<strong>et</strong> Q be a Lévy<br />
process with characteristic tripl<strong>et</strong> (A, ν, γ h ) with respect to h, such that Q n ⇒ Q. Note that<br />
a sequ<strong>en</strong>ce of Lévy processes cannot converge to anything other than a Lévy process because<br />
due to converg<strong>en</strong>ce of characteristic functions, the limiting process must have stationary and<br />
in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt increm<strong>en</strong>ts. Define a function f by<br />
⎧<br />
0, |x| ≤ B,<br />
⎪⎨<br />
f(x) := 1, |x| ≥ 2B,<br />
⎪⎩ |x|−B<br />
B<br />
B < |x| < 2B.
66 CHAPTER 2. THE CALIBRATION PROBLEM<br />
By Proposition 1.7, ∫ ∞<br />
−∞ f(x)ν(dx) = lim n→∞<br />
∫ ∞<br />
−∞ f(x)ν n(dx) = 0, which implies that the<br />
jumps of Q are boun<strong>de</strong>d by B.<br />
Define a function g by<br />
⎧<br />
⎨ e x − 1 − h(x) − 1 2<br />
g(x) :=<br />
h2 (x), x ≤ B,<br />
⎩<br />
e B − 1 − h(B) − 1 2 h2 (B), x > B.<br />
Th<strong>en</strong>, by Proposition 1.7 and because Q n satisfies the martingale condition (1.2) for every n,<br />
γ h + A 2 + ∫ ∞<br />
−∞<br />
(e x − 1 − h(x))ν(dx) = γ h + A + ∫ ∞<br />
−∞ h2 (x)ν(dx)<br />
2<br />
= lim<br />
n→∞<br />
which shows that Q also satisfies the condition (1.2).<br />
{γn h + A n + ∫ ∞<br />
−∞ h2 (x)ν n (dx)<br />
+<br />
2<br />
Proof of Theorem 2.1. L<strong>et</strong> {Q n } n≥1 ⊂ M ∩ L B be such that<br />
Condition (2.9) implies that for every n,<br />
∫ ∞<br />
+<br />
lim ‖C M − C Qn ‖ 2<br />
n→∞<br />
w = inf ‖C M − C Q ‖ 2 w<br />
Q∈M∩L B<br />
−∞<br />
∫ ∞<br />
−∞<br />
and ‖C M − C Qn ‖ 2 w ≤ ‖C M − C Q 0<br />
‖ 2 w for all n.<br />
g(x)ν(dx)<br />
g(x)ν n (dx)<br />
}<br />
= 0,<br />
|S 0 − C Qn (T 0 , K 0 )| ≥ |S 0 − C M (T 0 , K 0 )| − |C M (T 0 , K 0 ) − C Qn (T 0 , K 0 )|<br />
≥ |S 0 − C M (T 0 , K 0 )| − ‖C M − C Qn ‖ w<br />
√<br />
w0<br />
≥ |S 0 − C M (T 0 , K 0 )| − ‖C M − C Q 0<br />
‖ w<br />
√<br />
w0<br />
> 0.<br />
Therefore, by Lemmas 2.3 and 2.4, there exists a subsequ<strong>en</strong>ce {Q nm } m≥1 of {Q n } n≥1 and<br />
Q ∗ ∈ M ∩ L B such that Q nm ⇒ Q. By Lemma 2.2,<br />
‖C M − C Q∗ ‖ 2 w = lim ‖C M − C Qnm ‖ 2<br />
m→∞<br />
w = inf ‖C M − C Q ‖ 2 w,<br />
Q∈M∩L B<br />
which shows that Q ∗ is a solution of the least squares calibration problem (2.4).<br />
2.1.3 Continuity<br />
Mark<strong>et</strong> option prices are typically <strong>de</strong>fined up to a bid-ask spread and the close prices used for<br />
calibration may therefore contain numerical errors. If the solution of the calibration problem
2.1. LEAST SQUARES CALIBRATION 67<br />
is not continuous with respect to mark<strong>et</strong> data, these small errors may dramatically alter the<br />
result of calibration, r<strong>en</strong><strong>de</strong>ring it compl<strong>et</strong>ely useless. On the other hand, ev<strong>en</strong> if mark<strong>et</strong> data<br />
did not contain errors, in abs<strong>en</strong>ce of continuity, small daily changes in prices could lead to large<br />
variations of calibrated param<strong>et</strong>ers and of other quantities computed using these param<strong>et</strong>ers<br />
(like prices of exotic options).<br />
Wh<strong>en</strong> the calibration problem has more than one solution, care should be tak<strong>en</strong> in <strong>de</strong>fining<br />
what is meant by continuity. In the sequel, we will use the following <strong>de</strong>finition (see, e.g. [40]),<br />
that applies to all calibration problems, discussed in this chapter.<br />
Definition 2.1. The solutions of a calibration problem are said to <strong>de</strong>p<strong>en</strong>d continuously on input<br />
data at the point C M if for every sequ<strong>en</strong>ce of data s<strong>et</strong>s {C n M } n≥0 such that ‖C n M −C M‖ w −−−→<br />
n→∞ 0,<br />
if Q n is a solution of the calibration problem with data C n M th<strong>en</strong><br />
1. {Q n } n≥1 has a weakly converg<strong>en</strong>t subsequ<strong>en</strong>ce {Q nm } m≥1 .<br />
2. The limit Q of every weakly converg<strong>en</strong>t subsequ<strong>en</strong>ce of {Q n } n≥1 is a solution of the<br />
calibration problem with data C M .<br />
Note that if the solution of the calibration problem with the limiting data C M is unique, this<br />
<strong>de</strong>finition reduces to the standard <strong>de</strong>finition of continuity, because in this case every subsequ<strong>en</strong>ce<br />
of {Q n } has a further subsequ<strong>en</strong>ce converging towards Q, which implies that Q n ⇒ Q.<br />
It is easy to construct an example of mark<strong>et</strong> data leading to a least squares calibration<br />
problem (2.4) that does not satisfy the above <strong>de</strong>finition.<br />
Example 2.2. Suppose that S 0 = 1, there are no interest rates or divi<strong>de</strong>nds and the mark<strong>et</strong> data<br />
for each n are giv<strong>en</strong> by a single observation:<br />
C n M(T = 1, K = 1) = E[(e Xn 1 − 1) + ] for n ≥ 1 and C M (T = 1, K = 1) = 1 − e −λ ,<br />
where Xt<br />
n is <strong>de</strong>fined by Equation (2.8) and λ > 0. Th<strong>en</strong> ‖CM n −C M‖ w −−−→ 0 and<br />
n→∞ Xn t is clearly<br />
a solution for data CM n , but the sequ<strong>en</strong>ce {Xn t } has no converg<strong>en</strong>t subsequ<strong>en</strong>ce (cf. Proposition<br />
1.7).<br />
Un<strong>de</strong>r conditions, similar to those of Theorem 2.1, Lemmas 2.2–2.4 allow to prove a continuity<br />
result for the least squares calibration problem (2.4).
68 CHAPTER 2. THE CALIBRATION PROBLEM<br />
Proposition 2.5. Suppose that there exists a couple (T 0 , K 0 ) with w 0 := w({T 0 , K 0 }) > 0 and<br />
l<strong>et</strong> C M be such that the condition (2.9) is satisfied for some Q 0 ∈ M ∩ L B . Th<strong>en</strong> the solutions<br />
of the least squares calibration problem (2.4) on M ∩ L B <strong>de</strong>p<strong>en</strong>d continuously on the mark<strong>et</strong><br />
data at the point C M .<br />
Proof. L<strong>et</strong> {CM n } n≥0 be a sequ<strong>en</strong>ce of data such that ‖CM n − C M‖ w −−−→<br />
n→∞<br />
n l<strong>et</strong> Q n be a solution of the calibration problem (2.4) on M ∩ L B with data CM<br />
n<br />
0, and for every<br />
(we can<br />
suppose without loss of g<strong>en</strong>erality that a solution exists for all n because it exists starting with<br />
a suffici<strong>en</strong>tly large n by Theorem 2.1). Th<strong>en</strong>, using the triangle inequality several times, we<br />
obtain:<br />
|S 0 − C Qn (T 0 , K 0 )|<br />
≥ |S 0 − C M (T 0 , K 0 )| − |C n M(T 0 , K 0 ) − C Qn (T 0 , K 0 )| − |C n M(T 0 , K 0 ) − C M (T 0 , K 0 )|<br />
≥ |S 0 − C M (T 0 , K 0 )| − ‖Cn M − CQ 0<br />
‖ w<br />
√<br />
w0<br />
− |C n M(T 0 , K 0 ) − C M (T 0 , K 0 )|<br />
≥ |S 0 − C M (T 0 , K 0 )| − ‖C M − C Q 0<br />
‖ w<br />
√<br />
w0<br />
− 2 ‖Cn M − C M‖ w<br />
√<br />
w0<br />
> C ′ > 0<br />
for some C ′ , starting from a suffici<strong>en</strong>tly large n. Therefore, by Lemmas 2.3 and 2.4, {Q n } has<br />
a subsequ<strong>en</strong>ce that converges weakly towards some Q ∗ ∈ M ∩ L B .<br />
L<strong>et</strong> {Q nm } ⊆ {Q n } with Q nm ⇒ Q ∗ ∈ M ∩ L B and l<strong>et</strong> Q ∈ M ∩ L B . Using Lemma 2.2 and<br />
the triangle inequality, we obtain:<br />
‖C Q∗ − C M ‖ w = lim ‖C Qnm − C M ‖ w ≤ lim inf<br />
m m<br />
{‖CQnm − C nm<br />
M ‖ w + ‖C nm<br />
M − C M‖ w }<br />
≤ lim inf<br />
m<br />
‖CQnm − C nm<br />
M ‖ w ≤ lim inf<br />
m<br />
‖CQ − C nm<br />
M ‖ w ≤ ‖C Q − C M ‖ w ,<br />
which shows that Q ∗ is in<strong>de</strong>ed a solution of the calibration problem (2.4) with data C M .<br />
2.1.4 Numerical difficulties of least squares calibration<br />
A major obstacle for the numerical implem<strong>en</strong>tation of the least squares calibration is the nonconvexity<br />
of the optimization problem (2.4), which is due to the non-convexity of the domain<br />
(M ∩ L), where the pricing error functional Q ↦→ ‖C Q − C M ‖ 2 is to be optimized. Due to this<br />
difficulty, the pricing error functional may have several local minima, and the gradi<strong>en</strong>t <strong>de</strong>sc<strong>en</strong>t
2.2. SELECTION USING RELATIVE ENTROPY 69<br />
algorithm used for numerical optimization may stop in one of these local minima, leading to a<br />
much worse calibration quality than that of the true solution.<br />
Figure 2.3 illustrates this effect in the (param<strong>et</strong>ric) framework of the variance gamma mo<strong>de</strong>l<br />
(1.18). The left graph shows the behavior of the calibration functional in a small region around<br />
the global minimum. Since in this mo<strong>de</strong>l there are only three param<strong>et</strong>ers, the i<strong>de</strong>ntification<br />
problem is not pres<strong>en</strong>t, and a nice profile appearing to be convex can be observed. However,<br />
wh<strong>en</strong> we look at the calibration functional on a larger scale (κ changes b<strong>et</strong>we<strong>en</strong> 1 and 8),<br />
the convexity disappears and we observe a ridge (highlighted with a dashed black line), which<br />
separates two regions: if the minimization is initiated in the region (A), the algorithm will<br />
ev<strong>en</strong>tually locate the minimum, but if we start in the region (B), the gradi<strong>en</strong>t <strong>de</strong>sc<strong>en</strong>t m<strong>et</strong>hod<br />
will lead us away from the global minimum and the required calibration quality will never be<br />
achieved.<br />
B<br />
15000<br />
x 10 5<br />
2<br />
1.8<br />
10000<br />
5000<br />
1.6<br />
1.4<br />
1.2<br />
1<br />
A<br />
0.8<br />
0.25<br />
0<br />
0.2<br />
0.15<br />
0.1<br />
0.05<br />
κ<br />
0<br />
min<br />
0.14<br />
0.16<br />
0.18<br />
σ<br />
0.2<br />
0.22<br />
0.24<br />
0.6<br />
8<br />
7<br />
6<br />
5<br />
4<br />
κ<br />
3<br />
2<br />
1<br />
0<br />
0.1<br />
0.15<br />
σ<br />
0.2<br />
Figure 2.3: Sum of squared differ<strong>en</strong>ces b<strong>et</strong>we<strong>en</strong> mark<strong>et</strong> prices (DAX options maturing in 10<br />
weeks) and mo<strong>de</strong>l prices in the variance gamma mo<strong>de</strong>l (1.18) as a function of σ and κ, the third<br />
param<strong>et</strong>er being fixed. Left: small region around the global minimum. Right: error surface on<br />
a larger scale.<br />
2.2 Selection of solutions using relative <strong>en</strong>tropy<br />
Wh<strong>en</strong> the option pricing constraints do not <strong>de</strong>termine the expon<strong>en</strong>tial Lévy mo<strong>de</strong>l compl<strong>et</strong>ely<br />
(this is for example the case if the number of constraints is finite), additional information may
70 CHAPTER 2. THE CALIBRATION PROBLEM<br />
be introduced into the problem by specifying a prior mo<strong>de</strong>l: we suppose giv<strong>en</strong> a Lévy process<br />
P and look for the solution of the problem (2.4) that has the smallest relative <strong>en</strong>tropy with<br />
respect to P . For two probabilities P and Q on the same measurable space (Ω, F), the relative<br />
<strong>en</strong>tropy of Q with respect to P is <strong>de</strong>fined by<br />
⎧ [ ]<br />
⎨ E P dQ dQ<br />
dP<br />
log<br />
dP<br />
, if Q ≪ P,<br />
I(Q|P ) =<br />
⎩<br />
∞, otherwise,<br />
(2.10)<br />
where by conv<strong>en</strong>tion x log x = 0 wh<strong>en</strong> x = 0. For a time horizon T ≤ T ∞ we <strong>de</strong>fine I T (Q|P ) :=<br />
I(Q| FT |P | FT ).<br />
Minimum <strong>en</strong>tropy least squares calibration problem<br />
Giv<strong>en</strong> prices C M of call options<br />
and a prior Lévy process P , find a least squares solution Q ∗ ∈ Q LS , such that<br />
I(Q ∗ |P ) =<br />
inf I(Q|P ). (2.11)<br />
Q∈QLS In the sequel, any such Q ∗ will be called a minimum <strong>en</strong>tropy least squares solution (MELSS)<br />
and the s<strong>et</strong> of all such solutions will be <strong>de</strong>noted by Q MELS .<br />
The prior probability P must reflect our a priori knowledge about the risk-neutral distribution<br />
of the un<strong>de</strong>rlying. A natural choice of prior, <strong>en</strong>suring abs<strong>en</strong>ce of arbitrage in the calibrated<br />
mo<strong>de</strong>l, is an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l, estimated from the time series of r<strong>et</strong>urns. The effect of<br />
the choice of prior on the solution of the calibration problem and the possible ways to choose<br />
it in practice are discussed in Section 3.2.<br />
Using relative <strong>en</strong>tropy for selection of solutions removes, to some ext<strong>en</strong>t, the i<strong>de</strong>ntification<br />
problem of least-squares calibration. Whereas in the least squares case, this was an important<br />
nuisance, now, if two measures reproduce mark<strong>et</strong> option prices with the same precision and have<br />
the same <strong>en</strong>tropic distance to the prior, this means that both measures are compatible with all<br />
the available information. Knowledge of many such probability measures instead of one may be<br />
se<strong>en</strong> as an advantage, because it allows to estimate mo<strong>de</strong>l risk and provi<strong>de</strong> confi<strong>de</strong>nce intervals<br />
for the prices of exotic options. However, the calibration problem (2.11) remains ill-posed: since<br />
the minimization of <strong>en</strong>tropy is done over the results of least squares calibration, problem (2.11)<br />
may only admit a solution if problem (2.4) does. Also, Q LS is not necessarily a compact s<strong>et</strong>,
2.2. SELECTION USING RELATIVE ENTROPY 71<br />
so ev<strong>en</strong> if it is nonempty, the least squares solution minimizing the relative <strong>en</strong>tropy may not<br />
exist. Other un<strong>de</strong>sirable properties like abs<strong>en</strong>ce of continuity and numerical instability are also<br />
inherited from the least squares approach. In Section 2.5 we will propose a regularized version<br />
of problem (2.11) that does not suffer from these difficulties.<br />
The choice of relative <strong>en</strong>tropy as a m<strong>et</strong>hod for selection of solutions of the calibration<br />
problem is driv<strong>en</strong> by the following consi<strong>de</strong>rations:<br />
• The relative <strong>en</strong>tropy is a conv<strong>en</strong>i<strong>en</strong>t notion of distance for probability measures. In<strong>de</strong>ed,<br />
it is convex, nonnegative functional of Q for fixed P , equal to zero if and only if dQ<br />
dP = 1<br />
P -a.s. To see this, observe that<br />
E P [ dQ<br />
dP<br />
log<br />
dQ<br />
dP<br />
]<br />
= E P [ dQ<br />
dP<br />
log<br />
dQ<br />
dP − dQ<br />
dP + 1 ]<br />
,<br />
and that z log z − z + 1 is a convex nonnegative function of z, equal to zero if and only if<br />
z = 1.<br />
• The relative <strong>en</strong>tropy of two Lévy processes is easily expressed in terms of their characteristic<br />
tripl<strong>et</strong>s (see Theorem 2.9).<br />
• Relative <strong>en</strong>tropy, also called Kullback-Leibler distance, is a well-studied object. It appears<br />
in many domains including the theory of large <strong>de</strong>viations and the information theory. It<br />
has also already be<strong>en</strong> used in finance for pricing and calibration (see Section 2.3). We can<br />
therefore use the known properties of this functional (see e.g. [93]) as a starting point of<br />
our study.<br />
The minimum <strong>en</strong>tropy least squares solution need not always exist, but if the prior is chos<strong>en</strong><br />
correctly, that is, if there exists at least one solution of problem (2.4) with finite relative <strong>en</strong>tropy<br />
with respect to the prior, th<strong>en</strong> the MELSS will also exist, as shown by the following lemma.<br />
We recall that L NA stands for the s<strong>et</strong> of Lévy processes, satisfying the no arbitrage conditions<br />
of Proposition 1.8.<br />
Lemma 2.6. L<strong>et</strong> P ∈ L NA ∩ L + B<br />
for some B > 0 and suppose that the problem (2.4) admits a<br />
solution Q + with I(Q + |P ) = C < ∞. Th<strong>en</strong> the problem (2.11) admits a solution.<br />
Proof. The proof of this lemma uses the properties of the relative <strong>en</strong>tropy functional (2.10)<br />
that will be prov<strong>en</strong> in Section 2.4 below. Un<strong>de</strong>r the condition of the lemma, it is clear that the
72 CHAPTER 2. THE CALIBRATION PROBLEM<br />
solution Q ∗ of problem (2.11), if it exists, satisfies I(Q ∗ |P ) ≤ C. This <strong>en</strong>tails that Q ∗ ≪ P ,<br />
which means by Proposition 1.5 that Q ∗ ∈ L + B . Therefore, Q∗ belongs to the s<strong>et</strong><br />
L + B ∩ {Q ∈ M ∩ L : ‖CQ − C M ‖ = ‖C Q+ − C M ‖} ∩ {Q ∈ L : I(Q|P ) ≤ C}. (2.12)<br />
Lemma 2.10 and the Prohorov’s theorem <strong>en</strong>tail that the level s<strong>et</strong> {Q ∈ L : I(Q|P ) ≤ C}<br />
is relatively weakly compact. On the other hand, by Corollary 2.1, I(Q|P ) is weakly lower<br />
semicontinuous with respect to Q for fixed P . Therefore, the s<strong>et</strong> {Q ∈ P(Ω) : I(Q|P ) ≤ C} is<br />
weakly closed and since by Lemma 2.4, M ∩ L + B is also weakly closed, the s<strong>et</strong> M ∩ L+ B ∩ {Q ∈<br />
L : I(Q|P ) ≤ C} is weakly compact. Lemma 2.2 th<strong>en</strong> implies that the s<strong>et</strong> (2.12) is also weakly<br />
compact. Since I(Q|P ) is weakly lower semicontinuous, it reaches its minimum on this s<strong>et</strong>.<br />
2.3 The use of relative <strong>en</strong>tropy for pricing and calibration: review<br />
of literature<br />
2.3.1 Pricing with minimal <strong>en</strong>tropy martingale measure<br />
It is known (see [25, Theorem 4.7] or [27, Remark 10.3]) that all expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls<br />
with the exception of the Black-Scholes mo<strong>de</strong>l and the mo<strong>de</strong>l driv<strong>en</strong> by the comp<strong>en</strong>sated Poisson<br />
process correspond to incompl<strong>et</strong>e mark<strong>et</strong>s meaning that there exists no unique equival<strong>en</strong>t<br />
martingale measure.<br />
In the incompl<strong>et</strong>e mark<strong>et</strong> s<strong>et</strong>ting many authors including [24, 41, 42, 49, 72, 73, 89] have investigated<br />
the minimal <strong>en</strong>tropy martingale measure, that is, the pricing measure that minimizes<br />
the relative <strong>en</strong>tropy with respect to the historical probability P . A probability measure Q ∗ ∈ M<br />
is called minimal <strong>en</strong>tropy martingale measure if<br />
I(Q ∗ |P ) = min I(Q|P ). (2.13)<br />
Q∈M<br />
Frittelli [42] proves the exist<strong>en</strong>ce of a minimal <strong>en</strong>tropy martingale measure provi<strong>de</strong>d that the<br />
stock price process is boun<strong>de</strong>d and that there exists a martingale measure with finite relative<br />
<strong>en</strong>tropy with respect to P .<br />
He further shows that if there exists an equival<strong>en</strong>t martingale<br />
measure with finite relative <strong>en</strong>tropy with respect to P , the MEMM is also equival<strong>en</strong>t to P .<br />
Several authors including [24, 49, 73] discuss minimal <strong>en</strong>tropy martingale measures for expon<strong>en</strong>tial<br />
Lévy mo<strong>de</strong>ls. The following result is prov<strong>en</strong> in Miyahara and Fujiwara [73].
2.3. RELATIVE ENTROPY IN THE LITERATURE 73<br />
Theorem 2.7. L<strong>et</strong> P be a Lévy process with characteristic tripl<strong>et</strong> (A, ν, γ). If there exists a<br />
constant β ∈ R such that<br />
∫<br />
{x>1}<br />
γ +<br />
e x e β(ex −1) ν(dx) < ∞, (2.14)<br />
( 1<br />
2 + β )<br />
A +<br />
∫<br />
|x|≤1<br />
{<br />
} ∫<br />
(e x − 1)e β(ex−1) − x ν(dx) + (e x − 1)e β(ex−1) ν(dx) = 0,<br />
|x|>1<br />
th<strong>en</strong> there exists a minimal <strong>en</strong>tropy martingale measure Q ∗ with the following properties:<br />
1. The measure Q ∗ corresponds to a Lévy process: Q ∗ ∈ L with characteristic tripl<strong>et</strong><br />
A ∗ = A,<br />
ν ∗ (dx) = e β(ex−1) ν(dx),<br />
∫<br />
γ ∗ = γ + βA + x(e β(ex−1) − 1)ν(dx).<br />
|x|≤1<br />
2. The measure Q ∗ is an equival<strong>en</strong>t martingale measure: Q ∗ ∼ P .<br />
3. The minimal relative <strong>en</strong>tropy is giv<strong>en</strong> by<br />
{ ∫ β ∞<br />
}<br />
I(Q ∗ |P ) = −T<br />
2 (1 + β)A + βγ + {e β(ex−1) − 1 − βx1 |x|≤1 }ν(dx) . (2.15)<br />
−∞<br />
Remark 2.1. It is easy to show, along the lines of the proof of Proposition 1.8, that condition<br />
(2.14) is satisfied, in particular, if P ∈ L NA ∩ L + B<br />
for some B > 0, which corresponds to a stock<br />
price process with jumps boun<strong>de</strong>d from above in a mark<strong>et</strong> without arbitrage opportunity.<br />
Since large positive jumps do not happ<strong>en</strong> very oft<strong>en</strong> in real mark<strong>et</strong>s, (2.14) turns out to be<br />
much less restrictive (and easier to check) than the g<strong>en</strong>eral hypotheses in [42]. This shows that<br />
the notion of MEMM is especially useful and conv<strong>en</strong>i<strong>en</strong>t in the context of expon<strong>en</strong>tial Lévy<br />
mo<strong>de</strong>ls.<br />
In addition to its computational tractability, the interest of the minimal <strong>en</strong>tropy martingale<br />
measure is due to its economic interpr<strong>et</strong>ation as the pricing measure that corresponds to the<br />
limit of utility indiffer<strong>en</strong>ce price for the expon<strong>en</strong>tial utility function wh<strong>en</strong> the risk aversion<br />
coeffici<strong>en</strong>t t<strong>en</strong>ds to zero. Consi<strong>de</strong>r an investor with initial <strong>en</strong>dowm<strong>en</strong>t c, whose utility function<br />
is giv<strong>en</strong> by<br />
U α (x) := 1 − e −αx , (2.16)
74 CHAPTER 2. THE CALIBRATION PROBLEM<br />
where α is a risk-aversion coeffici<strong>en</strong>t. Giv<strong>en</strong> some s<strong>et</strong> of admissible trading strategies Θ, the<br />
utility indiffer<strong>en</strong>ce price p α (c, H) of a claim H for this investor is <strong>de</strong>fined as the solution of the<br />
following equation:<br />
∫<br />
sup E[U α (c + p α (c, H) +<br />
θ∈Θ<br />
(0,T ]<br />
∫<br />
θ u dS u − H)] = sup E[U α (c + θ u dS u )].<br />
θ∈Θ<br />
(0,T ]<br />
Due to the special form (2.16) of the utility function, the initial <strong>en</strong>dowm<strong>en</strong>t c cancels out of the<br />
above equation and we see that<br />
p α (c, H) = p α (0, H) := p α (H).<br />
Using the results in [33], Miyahara and Fujiwara [73] established the following properties of<br />
utility indiffer<strong>en</strong>ce price in expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls. Similar results have be<strong>en</strong> obtained by El<br />
Karoui and Rouge [39] in the s<strong>et</strong>ting of continuous processes.<br />
Proposition 2.8. L<strong>et</strong> (X, P ) be a Lévy process such that P ∈ L + B ∩ L NA, and l<strong>et</strong> Q ∗ be the<br />
MEMM <strong>de</strong>fined by (2.13). L<strong>et</strong> S t := e Xt and l<strong>et</strong> Θ inclu<strong>de</strong> all predictable S-integrable processes<br />
θ such that ∫ (0,t] θ udS u is a martingale for each local martingale measure Q, with I(Q|P ) < ∞.<br />
Th<strong>en</strong> the corresponding utility indiffer<strong>en</strong>ce price p α (H) of a boun<strong>de</strong>d claim H has the following<br />
properties:<br />
1. p α (H) ≥ E Q∗ [H] for any α > 0.<br />
2. If 0 < α < β th<strong>en</strong> p α (H) ≤ p β (H).<br />
3. lim α↓0 p α (H) = E Q∗ [H].<br />
The price of a claim H computed un<strong>de</strong>r the MEMM thus turns out to be the highest price<br />
at which all investors with expon<strong>en</strong>tial utility function will be willing to buy this claim.<br />
Kalls<strong>en</strong> [58] <strong>de</strong>fines neutral <strong>de</strong>rivative prices for which the optimal trading strategy consists<br />
in having no conting<strong>en</strong>t claim in one’s portfolio. This approach to valuation in incompl<strong>et</strong>e<br />
mark<strong>et</strong>s corresponds to the notion of fair price introduced by Davis [31]. Kalls<strong>en</strong> further shows<br />
that such prices are unique and correspond to a linear arbitrage-free pricing system, <strong>de</strong>fined<br />
by an equival<strong>en</strong>t martingale measure (neutral pricing measure). If the utility function of an<br />
investor has the form (2.16), the neutral pricing measure coinci<strong>de</strong>s with the minimal <strong>en</strong>tropy
2.3. RELATIVE ENTROPY IN THE LITERATURE 75<br />
martingale measure. The neutral pricing measure Q ∗ also corresponds to the least favorable<br />
mark<strong>et</strong> compl<strong>et</strong>ion from the point of view of the investor in the following s<strong>en</strong>se. L<strong>et</strong><br />
V (c, Q) := sup{E[U(c + X − E Q [X])] : X is F T -measurable}<br />
be the maximum possible expected utility that an investor with initial <strong>en</strong>dowm<strong>en</strong>t c and utility<br />
function U can g<strong>et</strong> by trading in a mark<strong>et</strong> where the price of every conting<strong>en</strong>t claim X is equal<br />
to E Q [X]. Th<strong>en</strong><br />
V (c, Q ∗ ) =<br />
inf V (c, Q),<br />
Q∈EMM(P )<br />
that is, the neutral pricing measure minimizes the maximum possible expected utility that an<br />
investor can g<strong>et</strong> in a compl<strong>et</strong>ed mark<strong>et</strong>, over all possible arbitrage-free compl<strong>et</strong>ions. The notion<br />
of neutral pricing measure thus coinci<strong>de</strong>s with the minimax measures studied in [16], [49] and<br />
other papers.<br />
2.3.2 Calibration via relative <strong>en</strong>tropy minimization<br />
Despite its analytic tractability and interesting economic interpr<strong>et</strong>ation, the MEMM has an important<br />
drawback which makes it impossible to use for pricing in real mark<strong>et</strong>s: it does not take<br />
into account the information obtained from prices of tra<strong>de</strong>d options. To tackle this problem, Goll<br />
and Rüsch<strong>en</strong>dorf [48] introduced the notion of minimal distance martingale measure consist<strong>en</strong>t<br />
with observed mark<strong>et</strong> prices. In particular, giv<strong>en</strong> prices of call options {C M (T i , K i )} N i=1 , a probability<br />
measure Q ∗ ∈ M is called consist<strong>en</strong>t minimal <strong>en</strong>tropy martingale measure (CMEMM)<br />
if<br />
I(Q ∗ |P ) = min I(Q|P ),<br />
Q<br />
where the minimum is tak<strong>en</strong> over all martingale measures Q such that C M (T i , K i ) = C Q (T i , K i )<br />
for i = 1, . . . , N.<br />
Kalls<strong>en</strong> [58] shows that consist<strong>en</strong>t minimal distance martingale measures correspond to<br />
constant <strong>de</strong>mand <strong>de</strong>rivative pricing (wh<strong>en</strong> the optimal portfolio must contain not zero but<br />
a fixed amount of each tra<strong>de</strong>d <strong>de</strong>rivative), thus providing an economic rationale for distance<br />
minimization un<strong>de</strong>r constraints, and, in particular, for <strong>en</strong>tropy minimization.<br />
A drawback of CMEMM is that it may be very difficult to compute numerically. In particular,<br />
if X is a Lévy process un<strong>de</strong>r the historical measure P , it will in g<strong>en</strong>eral no longer be
76 CHAPTER 2. THE CALIBRATION PROBLEM<br />
a Lévy process un<strong>de</strong>r a consist<strong>en</strong>t minimal <strong>en</strong>tropy martingale measure and no analytic results<br />
similar to Theorem 2.7 are available for the constrained case. For example, l<strong>et</strong> {X t } t≥0 be a<br />
real-valued Lévy process on (A, ν, γ) such that for every t,<br />
X t = N ′ t − N ′′<br />
t , (2.17)<br />
where N ′ and N ′′ are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt Poisson processes with int<strong>en</strong>sity 1 un<strong>de</strong>r P . It follows from<br />
Proposition 1.5 that the s<strong>et</strong> of Lévy processes equival<strong>en</strong>t to P and satisfying the martingale<br />
condition (1.2) contains all processes un<strong>de</strong>r which X has the form (2.17) where N ′ and N ′′ are<br />
still in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt and have respective int<strong>en</strong>sities λ ′ = λ and λ ′′ = eλ for some λ > 0. The s<strong>et</strong> of<br />
all equival<strong>en</strong>t martingale measures un<strong>de</strong>r which X remains a Lévy process is thus param<strong>et</strong>rized<br />
by one param<strong>et</strong>er λ.<br />
If one allows X to be an additive process (process with in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt<br />
increm<strong>en</strong>ts, continuous in probability) un<strong>de</strong>r the new measure, the class of equival<strong>en</strong>t martingale<br />
measures is much larger: it follows from Theorem IV.4.32 in [54] that N ′ and N ′′ can now<br />
have variable (but <strong>de</strong>terministic) int<strong>en</strong>sities λ ′ (t) = λ(t) and λ ′′ (t) = eλ(t) for some function<br />
λ : [0, T ∞ ] → (0, ∞). It is clear that many mark<strong>et</strong> data s<strong>et</strong>s (involving several maturities) can<br />
be reproduced by an equival<strong>en</strong>t martingale measure, un<strong>de</strong>r which X is an additive process but<br />
not by a martingale measure un<strong>de</strong>r which X is a Lévy process, which implies that un<strong>de</strong>r the<br />
consist<strong>en</strong>t minimal <strong>en</strong>tropy martingale measure X will not be a Lévy process.<br />
Stutzer [91] suggests a three-step algorithm for numerical evaluation of <strong>de</strong>rivative prices<br />
un<strong>de</strong>r the CMEMM in a mo<strong>de</strong>l with a single time horizon T . This m<strong>et</strong>hod allows to compute<br />
prices of European options with maturity T , consist<strong>en</strong>t with prices of mark<strong>et</strong>-quoted European<br />
options with the same maturity. First, possible ass<strong>et</strong> price values at time T , {P h } N h=1<br />
and the<br />
corresponding probabilities ˆπ(h) are estimated nonparam<strong>et</strong>rically using a histogram estimator<br />
from the historical r<strong>et</strong>urn values. Second, one needs to find the probabilities π ∗ (h), that satisfy<br />
the martingale constraint and the pricing constraints and have the smallest relative <strong>en</strong>tropy with<br />
respect to ˆπ. In this simplified one period mo<strong>de</strong>l the martingale condition reduces to a single<br />
constraint that the discounted expectation of stock price un<strong>de</strong>r π ∗ be equal to its pres<strong>en</strong>t value.<br />
The European options expiring at T can th<strong>en</strong> be priced using these martingale probabilities π ∗ .<br />
In this paper, Stutzer suggests an information theor<strong>et</strong>ic rationale for using the relative<br />
<strong>en</strong>tropy (also called Kullback-Leibler information criterion) for pricing and calibration. From<br />
a Bayesian point of view, the historical prices constitute a prior information about the future
2.3. RELATIVE ENTROPY IN THE LITERATURE 77<br />
risk-neutral distribution of ass<strong>et</strong> prices.<br />
This prior must be updated to take into account<br />
the martingale constraint and the observed option prices, and it is natural to <strong>de</strong>mand that the<br />
updated distribution incorporate no additional information other than the martingale constraint<br />
and the pricing constraints. One must therefore minimize some quantitative measure of relative<br />
information of the two distributions, and it has be<strong>en</strong> shown (see [52]) that every measure of<br />
information satisfying a s<strong>et</strong> of natural axioms must be proportional to Kullback-Leibler relative<br />
<strong>en</strong>tropy.<br />
Because it only allows to reconstruct the ass<strong>et</strong> price distribution for one specified time<br />
horizon, and only takes into account the prices of options that expire at this horizon, Stutzer’s<br />
m<strong>et</strong>hod does not provi<strong>de</strong> any information about the risk-neutral process and thus cannot be<br />
used to price any <strong>de</strong>rivative that <strong>de</strong>p<strong>en</strong>ds on the stock price at times other than T . Avellaneda<br />
<strong>et</strong> al. [3] pursue the same logic further and propose a m<strong>et</strong>hod allowing to construct a discr<strong>et</strong>e<br />
approximation of the law of the process un<strong>de</strong>rlying the observed option prices. They consi<strong>de</strong>r<br />
N < ∞ fixed trajectories {X 1 , . . . , X N } that the price process can take, simulated beforehand<br />
from a prior mo<strong>de</strong>l. The new state space Ω ′ thus contains a finite number of elem<strong>en</strong>ts: Ω ′ =<br />
{X 1 , . . . , X N }. The new prior P ′ is the uniform law on Ω ′ : P ′ (X i ) = 1 N<br />
and the paper<br />
suggests to calibrate the weights (probabilities) of these trajectories q i := Q ′ (X i ) to reproduce<br />
mark<strong>et</strong>-quoted option prices correctly. Minimizing relative <strong>en</strong>tropy I(Q ′ |P ′ ) is th<strong>en</strong> equival<strong>en</strong>t<br />
to maximizing the <strong>en</strong>tropy of Q ′ and the calibration problem becomes:<br />
maximize −<br />
N∑<br />
q i log q i un<strong>de</strong>r constraints E Q′ [H j ] = C j , j = 1, . . . , M,<br />
i=1<br />
where H j are terminal payoffs and C j the observed mark<strong>et</strong> prices of M tra<strong>de</strong>d options. D<strong>en</strong>oting<br />
by g ij the payoff of j-th option on the i-th trajectory, and introducing Lagrange multipliers<br />
λ 1 , . . . , λ M , Avellaneda <strong>et</strong> al. reformulate the calibration problem as a minimax problem:<br />
⎧<br />
⎨ N (<br />
min max<br />
λ q ⎩ − ∑<br />
M∑ N<br />
) ⎫ ∑<br />
⎬<br />
q i log q i + λ j q i g ij − C j<br />
⎭ .<br />
i=1<br />
The inner maximum can be computed analytically and, since it is tak<strong>en</strong> over linear functions<br />
of λ 1 , . . . , λ M , yields a convex function of Lagrange multipliers. The outer minimum can th<strong>en</strong><br />
j=1<br />
be evaluated numerically using a gradi<strong>en</strong>t <strong>de</strong>sc<strong>en</strong>t m<strong>et</strong>hod.<br />
This technique (weighted Monte Carlo) is attractive for numerical computations but has<br />
a number of drawbacks from the theor<strong>et</strong>ical viewpoint.<br />
i=1<br />
First, the result of calibration is a
78 CHAPTER 2. THE CALIBRATION PROBLEM<br />
probability measure on a finite s<strong>et</strong> of paths chos<strong>en</strong> beforehand; it does not allow to reconstruct<br />
a process on the original space Ω. Second, the martingale condition is not imposed in this<br />
approach (because this would correspond to an infinite number of constraints). As a result,<br />
<strong>de</strong>rivative prices computed with the weighted Monte Carlo algorithm may contain arbitrage<br />
opportunities, especially wh<strong>en</strong> applied to forward start contracts.<br />
Nguy<strong>en</strong> [77] studies the converg<strong>en</strong>ce of the above m<strong>et</strong>hod by Avellaneda <strong>et</strong> al. wh<strong>en</strong> the<br />
number of paths t<strong>en</strong>ds to infinity as well as the stability of the calibration procedure, minimization<br />
criteria other than relative <strong>en</strong>tropy, possible ways to impose the (approximate) martingale<br />
condition and many other issues related to this calibration m<strong>et</strong>hodology. Statistical properties<br />
of weighted Monte Carlo estimators are also studied in [46].<br />
Chapter 8 of [77] introduces an interesting theor<strong>et</strong>ical approach to minimal <strong>en</strong>tropy calibration,<br />
that is related to the pres<strong>en</strong>t work and is worth being discussed in more <strong>de</strong>tail. Starting<br />
with a very g<strong>en</strong>eral prior jump-diffusion mo<strong>de</strong>l P for the stock price S t of the form<br />
∫<br />
dS t = S t− [b(t, S t− )dt + σ(t, S t− )dW t + Φ(t, S t− , z)(Π(dt, dz) − π(dt, dz))], (2.18)<br />
z∈R<br />
where Π is a homog<strong>en</strong>eous Poisson random measure with int<strong>en</strong>sity measure π(dt, dz) = dt ×<br />
ρ(dz), and the coeffici<strong>en</strong>ts satisfy some regularity hypotheses not listed here, Nguy<strong>en</strong> suggests<br />
to find a martingale measure Q ∗ which reproduces the observed option prices correctly and has<br />
the smallest relative <strong>en</strong>tropy with respect to P in a subclass M ′ of all martingale measures on<br />
(Ω, F). This subclass M ′ contains all martingale measures Q K un<strong>de</strong>r which S t has the same<br />
volatility σ and the comp<strong>en</strong>sator of Π is giv<strong>en</strong> by K(t, X t− , z)π(dt, dz) with<br />
K ∈ K H := {K(t, x, z) : [0, T ] × R × R → (0, ∞) Borel with | log K| ≤ log(H)φ 0 }<br />
for some φ 0 ∈ L 2 (ρ) positive with ‖φ 0 ‖ ∞ ≤ 1. In other words, the object of calibration here is<br />
the int<strong>en</strong>sity of jumps of a Markovian jump diffusion.<br />
The fact that the s<strong>et</strong><br />
M ′ := { Q K : K ∈ K H}<br />
is convex <strong>en</strong>ables Nguy<strong>en</strong> to use classical convex analysis m<strong>et</strong>hods to study the calibration<br />
problem. In particular, he proves the exist<strong>en</strong>ce and uniqu<strong>en</strong>ess of the solution of the (p<strong>en</strong>alized)<br />
calibration problem un<strong>de</strong>r the condition that the coeffici<strong>en</strong>ts appearing in (2.18) are suffici<strong>en</strong>tly<br />
regular and the drift b and option price constraint C belong to some neighborhood of (r, C r ),
2.3. RELATIVE ENTROPY IN THE LITERATURE 79<br />
where r is the interest rate and C r <strong>de</strong>notes the option prices computed for S t giv<strong>en</strong> by (2.18)<br />
with b = r. Unfortunately, no insight is giv<strong>en</strong> as to the size of this neighborhood.<br />
An important drawback of the calibration m<strong>et</strong>hodology advocated by Nguy<strong>en</strong> [77] is the<br />
difficulty of numerical implem<strong>en</strong>tation. The solution is obtained by minimizing a certain function<br />
of Lagrange multipliers (the value function), which is itself a solution of nonlinear partial<br />
integro-differ<strong>en</strong>tial equation of HJB type, and the author gives no indication about the numerical<br />
m<strong>et</strong>hods that can be used. In addition, since a finite s<strong>et</strong> of option prices does not typically<br />
contain <strong>en</strong>ough information to i<strong>de</strong>ntify a three-dim<strong>en</strong>sional int<strong>en</strong>sity function K(t, x, z), the<br />
choice of the prior process, not discussed in [77], will play a crucial role.<br />
2.3.3 The pres<strong>en</strong>t study in the context of previous work on this subject<br />
In this thesis, we suppose that the prior probability P is a Lévy process and restrict the class<br />
of martingale measures Q that we consi<strong>de</strong>r as possible solutions of the calibration problem to<br />
those un<strong>de</strong>r which (X, Q) remains a Lévy process. Since this class is rather narrow, it may not<br />
contain a measure that reproduces the observed option prices exactly. Therefore, in problem<br />
(2.11) we only require that these prices be reproduced in the least squares s<strong>en</strong>se.<br />
Restricting the calibration to the class of Lévy processes <strong>en</strong>ables us to compute the solution<br />
of the calibration problem numerically using a relatively simple algorithm (see Chapter 3). Our<br />
m<strong>et</strong>hod can thus be se<strong>en</strong> as a computable approximation of the consist<strong>en</strong>t minimal <strong>en</strong>tropy<br />
martingale measure, discussed by Kalls<strong>en</strong> [58] and Goll and Rüsch<strong>en</strong>dorf [48]. However, contrary<br />
to the approach by Avellaneda <strong>et</strong> al. [3], we do not discr<strong>et</strong>ize the space of sample paths:<br />
our m<strong>et</strong>hod yields a Lévy process on the initial state space Ω and not on the finite space of<br />
trajectories simulated beforehand. The solution of calibration problem (2.11) and its regularized<br />
version (2.27) can therefore be used for all types of computations with arbitrary precision.<br />
Another advantage of restricting the class of martingale measures is that using a finite number<br />
of option prices it is easier to calibrate a one-dim<strong>en</strong>sional object (the Lévy measure) than<br />
a three-dim<strong>en</strong>sional object (the int<strong>en</strong>sity function as in [77, Chapter 8]). Therefore, in our<br />
approach the influ<strong>en</strong>ce of the prior on the solution is less important (see Chapter 3).<br />
Unlike the class of all Markov processes and unlike the class of probabilities consi<strong>de</strong>red in<br />
[77, Chapter 8], the class of all probabilities Q, un<strong>de</strong>r which (X, Q) remains a Lévy process is
80 CHAPTER 2. THE CALIBRATION PROBLEM<br />
not convex. We are therefore unable to apply the m<strong>et</strong>hods of convex analysis to our formulation<br />
of the calibration problem and are limited to standard functional analysis tools. In particular,<br />
in our s<strong>et</strong>ting we cannot hope to obtain a uniqu<strong>en</strong>ess result for the solution of the calibration<br />
problem, but, as m<strong>en</strong>tioned in Section 2.2, uniqu<strong>en</strong>ess is not always a <strong>de</strong>sirable property from<br />
the financial viewpoint.<br />
2.4 Relative <strong>en</strong>tropy of Lévy processes<br />
In this subsection we explicitly compute the relative <strong>en</strong>tropy of two Lévy processes in terms of<br />
their characteristic tripl<strong>et</strong>s. Un<strong>de</strong>r additional assumptions this result was shown in [24] (where<br />
it is supposed that Q is equival<strong>en</strong>t to P and the Lévy process has finite expon<strong>en</strong>tial mom<strong>en</strong>ts<br />
un<strong>de</strong>r P ) and in [77] (where log dνQ<br />
dν P<br />
is supposed boun<strong>de</strong>d from above and below). We consi<strong>de</strong>r<br />
it important to give an elem<strong>en</strong>tary proof valid for all Lévy processes.<br />
Theorem 2.9 (Relative <strong>en</strong>tropy of Lévy processes). L<strong>et</strong> {X t } t≥0 be a real-valued Lévy<br />
process on (Ω, F, Q) and on (Ω, F, P ) with respective characteristic tripl<strong>et</strong>s (A Q , ν Q , γ Q ) and<br />
(A P , ν P , γ P ). Suppose that the conditions 1–5 of Proposition 1.5 are satisfied and <strong>de</strong>note A :=<br />
A Q = A P . Th<strong>en</strong> for every time horizon T ≤ T ∞ the relative <strong>en</strong>tropy of Q| FT<br />
P | FT<br />
can be computed as follows:<br />
with respect to<br />
I T (Q|P ) = I(Q| FT |P | FT ) = T { ∫ 1<br />
γ Q − γ P −<br />
2A<br />
T<br />
−1<br />
∫ ∞<br />
−∞<br />
x(ν Q − ν P )(dx)} 2<br />
1 A≠0 +<br />
( dν<br />
Q<br />
)<br />
dνQ<br />
log<br />
dνP dν P + 1 − dνQ<br />
dν P ν P (dx). (2.19)<br />
Proof. L<strong>et</strong> {X c t } t≥0 be the continuous martingale part of X un<strong>de</strong>r P (a Brownian motion), µ<br />
be the jump measure of X and φ := dνQ<br />
dν P . From [54, Theorem III.5.19], the <strong>de</strong>nsity process<br />
Z t := dQ| F t<br />
dP | Ft<br />
is the Doléans-Da<strong>de</strong> expon<strong>en</strong>tial of the Lévy process {N t } t≥0 <strong>de</strong>fined by<br />
∫<br />
N t := βXt c + (φ(x) − 1){µ(ds × dx) − ds ν P (dx)},<br />
[0,t]×R<br />
where β is giv<strong>en</strong> by<br />
⎧<br />
⎨ 1<br />
A<br />
β =<br />
{γQ − γ P − ∫ |x|≤1 x(φ(x) − 1)νP (dx)} if A > 0,<br />
⎩<br />
0 otherwise.
2.4. RELATIVE ENTROPY OF LEVY PROCESSES 81<br />
Choose 0 < ε < 1 and l<strong>et</strong> I := {x : ε ≤ φ(x) ≤ ε −1 }.<br />
martingales:<br />
∫<br />
N t ′ := βXt c +<br />
[0,t]×I<br />
(φ(x) − 1){µ(ds × dx) − ds ν P (dx)}<br />
∫<br />
N t ′′ := (φ(x) − 1){µ(ds × dx) − ds ν P (dx)}.<br />
[0,t]×(R\I)<br />
We split N t into two in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt<br />
Since N ′ and N ′′ never jump tog<strong>et</strong>her, [N ′ , N ′′ ] t = 0 and E(N ′ + N ′′ ) t = E(N 1 ) t E(N 2 ) t (cf.<br />
Equation II.8.19 in [54]). Moreover, since N ′ and N ′′ are Lévy processes and martingales, their<br />
stochastic expon<strong>en</strong>tials are also martingales (Proposition 1.4). Therefore,<br />
I T (Q|P ) = E P [Z T log Z T ]<br />
if these expectations exist.<br />
and<br />
= E P [E(N ′ ) T E(N ′′ ) T log E(N ′ ) T ] + E P [E(N ′ ) T E(N ′′ ) T log E(N ′′ ) T ]<br />
= E P [E(N ′ ) T log E(N ′ ) T ] + E P [E(N ′′ ) T log E(N ′′ ) T ] (2.20)<br />
Since ∆N ′ t > −1 a.s., E(N ′ ) t is almost surely positive. Therefore, from Proposition 1.3,<br />
U t := log E(N ′ ) t is a Lévy process with characteristic tripl<strong>et</strong>:<br />
This implies that e Ut<br />
A U = β 2 A,<br />
ν U (B) = ν P (I ∩ {x : log φ(x) ∈ B}) ∀B ∈ B(R),<br />
∫<br />
γ U = − β2 A ∞<br />
2 − (e x − 1 − x1 |x|≤1 )ν U (dx).<br />
−∞<br />
is a martingale and that U t has boun<strong>de</strong>d jumps and all expon<strong>en</strong>tial<br />
mom<strong>en</strong>ts. Therefore, E[U T e U T<br />
] < ∞ and can be computed as follows:<br />
E P [U T e U T<br />
] = −i d dz EP [e izU T<br />
]| z=−i = −iT ψ ′ (−i)E P [e U T<br />
] = −iT ψ ′ (−i)<br />
= T (A U + γ U +<br />
= β2 AT<br />
2<br />
I<br />
∫ ∞<br />
−∞<br />
(xe x − x1 |x|≤1 )ν U (dx))<br />
∫<br />
+ T (φ(x) log φ(x) + 1 − φ(x))ν P (dx) (2.21)<br />
It remains to compute E P [E(N ′′ ) T log E(N ′′ ) T ]. Since N ′′ is a compound Poisson process,<br />
E(N ′′ ) t = e bt ∏ s≤t<br />
(1 + ∆N<br />
′′<br />
s ), where b = ∫ R\I (1 − φ(x))νP (dx). L<strong>et</strong> ν ′′ be the Lévy measure of<br />
N ′′ and λ its jump int<strong>en</strong>sity. Th<strong>en</strong><br />
E(N ′′ ) T log E(N ′′ ) T = bT E(N ′′ ) T + e bT ∏ s≤T<br />
(1 + ∆N s ′′ ) ∑ log(1 + ∆N s ′′ )<br />
s≤T
82 CHAPTER 2. THE CALIBRATION PROBLEM<br />
and<br />
E P [E(N ′′ ) T log E(N ′′ ) T ] = bT + e bT<br />
∞ ∑<br />
k=0<br />
e<br />
−λT (λT )k<br />
k!<br />
E[ ∏ s≤T<br />
(1 + ∆N s ′′ ) ∑ log(1 + ∆N s ′′ )|k jumps]<br />
s≤T<br />
Since, un<strong>de</strong>r the condition that N ′′ jumps exactly k times in the interval [0, T ], the jump sizes<br />
are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt and i<strong>de</strong>ntically distributed, we find, <strong>de</strong>noting the g<strong>en</strong>eric jump size by ∆N ′′ :<br />
E P [E(N ′′ ) T log E(N ′′ ) T ]<br />
∑<br />
∞<br />
= bT + e bT e<br />
k=0<br />
−λT (λT )k<br />
= bT + λT E[(1 + ∆N ′′ ) log(1 + ∆N ′′ )]<br />
∫ ∞<br />
= bT + T (1 + x) log(1 + x)ν ′′ (dx)<br />
−∞<br />
∫<br />
= T (φ(x) log φ(x) + 1 − φ(x))ν P (dx).<br />
R\I<br />
k!<br />
kE[1 + ∆N ′′ ] k−1 E[(1 + ∆N ′′ ) log(1 + ∆N ′′ )]<br />
In particular, E P [E(N ′′ ) T log E(N ′′ ) T ] is finite if and only if the integral in the last line is finite.<br />
Combining the above expression with (2.21) and (2.20) finishes the proof.<br />
2.4.1 Properties of the relative <strong>en</strong>tropy functional<br />
Lemma 2.10. L<strong>et</strong> P, {P n } n≥1 ⊂ L + B for some B > 0, such that P n ⇒ P . Th<strong>en</strong> for every r > 0,<br />
the level s<strong>et</strong> L r := {Q ∈ L : I(Q|P n ) ≤ r for some n} is tight.<br />
Proof. For any Q ∈ L r , P Q <strong>de</strong>notes any elem<strong>en</strong>t of {P n } n≥1 , for which I(Q|P Q ) ≤ r.<br />
characteristic tripl<strong>et</strong> of Q is <strong>de</strong>noted by (A Q , ν Q , γ Q ) and that of P Q by (A P Q, ν P Q, γ P Q). In<br />
addition, we <strong>de</strong>fine φ Q := dνQ . From Theorem 2.9,<br />
dν P Q<br />
∫ ∞<br />
−∞<br />
(φ Q (x) log φ Q (x) + 1 − φ Q (x))ν P Q<br />
(dx) ≤ r/T ∞ .<br />
The<br />
Therefore, for u suffici<strong>en</strong>tly large,<br />
∫<br />
{φ Q >u}<br />
∫<br />
φ Q ν P Q<br />
(dx) ≤<br />
{φ Q >u}<br />
2φ Q [φ Q log φ Q + 1 − φ Q ]ν P Q(dx)<br />
φ Q log φ Q<br />
≤<br />
2r<br />
T ∞ log u ,<br />
which <strong>en</strong>tails that for u suffici<strong>en</strong>tly large,<br />
∫<br />
{φ Q >u}<br />
ν Q (dx) ≤<br />
2r<br />
T ∞ log u
2.4. RELATIVE ENTROPY OF LEVY PROCESSES 83<br />
uniformly with respect to Q ∈ L r . L<strong>et</strong> ε > 0 and choose u such that ∫ {φ Q >u} νQ (dx) ≤ ε/2 for<br />
every Q ∈ L r . By Proposition 1.7,<br />
∫ ∞<br />
−∞<br />
f(x)ν Pn (dx) →<br />
∫ ∞<br />
−∞<br />
f(x)ν P (dx)<br />
for every continuous boun<strong>de</strong>d function f that is i<strong>de</strong>ntically zero on a neighborhood of zero.<br />
Since the measures ν P and ν Pn<br />
for all n ≥ 1 are finite outsi<strong>de</strong> a neighborhood of zero, we can<br />
choose a compact K such that ν Pn (R \ K) ≤ ε/2u for every n. Th<strong>en</strong><br />
∫<br />
ν Q (R \ K) =<br />
(R\K)∩{φ Q ≤u}<br />
which proves property 1 of Proposition 1.6.<br />
∫<br />
φ Q ν P Q<br />
(dx) +<br />
ν Q (dx) ≤ ε,<br />
(R\K)∩{φ Q >u}<br />
It is easy to check by computing <strong>de</strong>rivatives that for every u > 0, on the s<strong>et</strong> {x : φ Q (x) ≤ u},<br />
(φ Q − 1) 2 ≤ 2u(φ Q log φ Q + 1 − φ Q ).<br />
Therefore, for u suffici<strong>en</strong>tly large and for all Q ∈ L r ,<br />
∫<br />
∣<br />
|x|≤1<br />
x(φ Q − 1)ν P Q (dx) ∣<br />
∫<br />
∣ ∣∣∣∣ ≤<br />
x(φ Q − 1)ν P Q (dx)<br />
∣ |x|≤1, φ Q ≤u<br />
∣<br />
∫|x|≤1, + x(φ Q − 1)ν P Q (dx)<br />
φ Q >u<br />
∣<br />
∫<br />
∫<br />
∫<br />
≤ x 2 ν P Q<br />
(dx) +<br />
(φ Q − 1) 2 ν P Q<br />
(dx) + 2 φ Q ν P Q<br />
(dx)<br />
∫<br />
≤<br />
∫<br />
≤<br />
|x|≤1<br />
|x|≤1<br />
|x|≤1<br />
x 2 ν P Q<br />
(dx) + 2u<br />
|x|≤1, φ Q ≤u<br />
∫ ∞<br />
−∞<br />
φ Q >u<br />
(φ Q log φ Q + 1 − φ Q )ν P Q<br />
(dx) +<br />
4r<br />
T ∞ log u<br />
x 2 ν P Q<br />
(dx) + 3ru<br />
T ∞<br />
. (2.22)<br />
By Proposition 1.6, applied to the sequ<strong>en</strong>ce {P n } n≥1 ,<br />
∫<br />
A Pn + x 2 ν Pn (dx) (2.23)<br />
|x|≤1<br />
is boun<strong>de</strong>d uniformly on n, which implies that the right hand si<strong>de</strong> of (2.22) is boun<strong>de</strong>d uniformly<br />
with respect to Q ∈ L r . From Proposition 1.5, A Q = A P Q<br />
for all Q ∈ L r because for the relative<br />
<strong>en</strong>tropy to be finite, necessarily Q ≪ P Q . From Theorem 2.9 and Proposition 1.5 it follows that<br />
{ ∫ 1<br />
} 2<br />
γ Q − γ P − x(ν Q − ν P )(dx) ≤ 2AP Qr<br />
.<br />
−1<br />
T ∞
84 CHAPTER 2. THE CALIBRATION PROBLEM<br />
From (2.23), A Pn<br />
is boun<strong>de</strong>d uniformly on n. Therefore, inequality (2.22) shows that |γ Q | is<br />
boun<strong>de</strong>d uniformly with respect to Q, which proves property 2 of Proposition 1.6.<br />
Once again, for u suffici<strong>en</strong>tly large,<br />
A Q +<br />
∫ ∞<br />
−∞<br />
∫<br />
(x 2 ∧ 1)φ Q ν P Q<br />
(dx) ≤ A Q + u (x 2 ∧ 1)ν P Q<br />
(dx)<br />
∫<br />
φ Q ≤u<br />
∫ ∞<br />
+ φ Q ν P Q<br />
(dx) ≤ A P Q<br />
+ u<br />
φ Q >u<br />
−∞<br />
(x 2 ∧ 1)ν P Q<br />
(dx) +<br />
2r<br />
T ∞ log u<br />
and (2.23) implies that the right hand si<strong>de</strong> is boun<strong>de</strong>d uniformly with respect to Q ∈ L r .<br />
Therefore, property 3 of Proposition 1.6 also holds and the proof is compl<strong>et</strong>ed.<br />
Lemma 2.11. L<strong>et</strong> Q and P be two probability measures on (Ω, F). Th<strong>en</strong><br />
I(Q|P ) =<br />
where C b (Ω) is space of boun<strong>de</strong>d continuous functions on Ω.<br />
{∫ ∫<br />
}<br />
sup fdQ − (e f − 1)dP , (2.24)<br />
f∈C b (Ω) Ω<br />
Ω<br />
Proof. Observe that<br />
⎧<br />
⎨ x log x + 1 − x, x > 0,<br />
φ(x) =<br />
⎩<br />
∞, x ≤ 0<br />
and φ ∗ (y) = e y − 1 are proper convex functions on R, conjugate to each other and apply<br />
Corollary 2 to Theorem 4 in [83].<br />
Corollary 2.1. The relative <strong>en</strong>tropy functional I(Q|P ) is weakly lower semicontinuous with<br />
respect to Q for fixed P .<br />
Lemma 2.12. L<strong>et</strong> P, {P n } n≥1 ⊂ L NA ∩ L + B for some B > 0 such that P n ⇒ P . There exists a<br />
sequ<strong>en</strong>ce {Q n } n≥1 ⊂ M ∩ L + B and a constant C < ∞ such that I(Q n|P n ) ≤ C for every n.<br />
Proof. For every n ≥ 1, by Remark 2.1, Theorem 2.7 can be applied to P n . L<strong>et</strong> Q n be the<br />
minimal <strong>en</strong>tropy martingale measure and β n be the corresponding constant, <strong>de</strong>fined in (2.14).<br />
We must show that the minimal relative <strong>en</strong>tropy, giv<strong>en</strong> by Equation (2.15), is boun<strong>de</strong>d uniformly<br />
on n.<br />
First, l<strong>et</strong> us show that the sequ<strong>en</strong>ce {β n } n≥1 is boun<strong>de</strong>d. L<strong>et</strong> h be a continuous boun<strong>de</strong>d<br />
truncation function, satisfying h(x) = x in a neighborhood of zero and for any Lévy process Q
2.5. REGULARIZING THE CALIBRATION PROBLEM 85<br />
with characteristic tripl<strong>et</strong> (A, ν, γ h ) with respect to the truncation function h, <strong>de</strong>fine<br />
( ) ∫ 1 ∞<br />
f(β, Q) := γ h +<br />
2 + β A +<br />
−∞<br />
( ) ( 1<br />
= γ h +<br />
2 + β A +<br />
∫ ∞<br />
+<br />
−∞<br />
∫ ∞<br />
−∞<br />
{<br />
(e x − 1)e β(ex −1) − h(x) −<br />
{<br />
}<br />
(e x − 1)e β(ex−1) − h(x) ν(dx)<br />
)<br />
h 2 (x)ν(dx)<br />
( ) }<br />
1<br />
2 + β h 2 (x) ν(dx). (2.25)<br />
Since (e x − 1)e β(ex −1) − x − ( 1<br />
2 + β) x 2 = o(|x| 2 ) and the integrand in the last term of (2.25) is<br />
boun<strong>de</strong>d on (−∞, B], by Proposition 1.7, for every β, lim n f(β, P n ) = f(β, P ).<br />
The support of ν Pn<br />
is boun<strong>de</strong>d from above by B, and the dominated converg<strong>en</strong>ce theorem<br />
allows to compute the <strong>de</strong>rivative of f(β, P n ) by interchanging the <strong>de</strong>rivative and the integral:<br />
f ′ β (β, P n) = A Pn +<br />
∫ ∞<br />
−∞<br />
(e x − 1) 2 e β(ex −1) ν Pn (dx) > 0.<br />
Therefore, β n is the unique solution of f(β, P n ) = 0. L<strong>et</strong> β ∗ be the solution of f(β, P ) = 0. The<br />
support of ν P is also boun<strong>de</strong>d from above by B and f ′ β (β∗ , P ) > 0. This means that there exist<br />
ε > 0 and finite constants β − < β ∗ and β + > β ∗ such that f(β − , P ) < −ε and f(β + , P ) > ε.<br />
One can th<strong>en</strong> find N such that for all n ≥ N, f(β − , P n ) < −ε/2 and f(β + , P n ) > ε/2, which<br />
means that β n ∈ [β − , β + ] and the sequ<strong>en</strong>ce {β n } is boun<strong>de</strong>d.<br />
To show that the sequ<strong>en</strong>ce of relative <strong>en</strong>tropies is boun<strong>de</strong>d, observe that for |x| ≤ 1,<br />
∣<br />
∣e β(ex−1) − 1 − βx∣ ≤ βe β(e−1)+1 (1 + βe)|x| 2<br />
and that for x ≤ B,<br />
∣<br />
∣e β(ex −1) − 1 − βx1 |x|≤1<br />
∣ ∣∣ ≤ βe<br />
β(e B +1) + 1 + βB.<br />
The uniform boun<strong>de</strong>dness of the sequ<strong>en</strong>ce of relative <strong>en</strong>tropies I(Q n |P n ) now follows from<br />
Proposition 1.6 and Equation (2.15).<br />
2.5 Regularizing the calibration problem<br />
As observed in Section 2.2, problem (2.11) is ill-posed and hard to solve numerically. In particular,<br />
its solutions, wh<strong>en</strong> they exist, may not be stable with respect to perturbations of mark<strong>et</strong><br />
data. If we do not know the prices C M exactly but only know the perturbed prices C δ M that
86 CHAPTER 2. THE CALIBRATION PROBLEM<br />
are within an error δ of C M , and want to construct an approximation to MELSS(C M ), the<br />
solution of problem (2.11) with the true data, it is not a good i<strong>de</strong>a to solve problem (2.11) with<br />
the noisy data C δ M<br />
because MELSS(Cδ M ) may be very far from MELSS(C M). We therefore<br />
need to regularize the problem (2.11), that is, construct a family of continuous “regularization<br />
operators” {R α } α>0 , where α is the param<strong>et</strong>er which <strong>de</strong>termines the int<strong>en</strong>sity of regularization,<br />
such that R α (CM δ ) converges to MELSS of the calibration problem as the noise level δ t<strong>en</strong>ds to<br />
zero if, for each δ, the regularization param<strong>et</strong>er α is chos<strong>en</strong> appropriately. The approximation<br />
to MELSS(C M ) using the noisy data CM δ is th<strong>en</strong> giv<strong>en</strong> by R α(CM δ ) with an appropriate choice<br />
of α.<br />
Following classical results on regularization of ill-posed problems (see [40]), we suggest to<br />
construct a regularized version of (2.11) by using the relative <strong>en</strong>tropy for p<strong>en</strong>alization rather<br />
than for selection, that is, to <strong>de</strong>fine<br />
J α (Q) = ‖C δ M − C Q ‖ 2 w + αI(Q|P ), (2.26)<br />
where α is the regularization param<strong>et</strong>er, and solve the following regularized calibration problem:<br />
Regularized calibration problem<br />
Giv<strong>en</strong> prices C M of call options, a prior Lévy process<br />
P and a regularization param<strong>et</strong>er α > 0, find Q ∗ ∈ M ∩ L, such that<br />
J α (Q ∗ ) =<br />
inf J α(Q). (2.27)<br />
Q∈M∩L<br />
Problem (2.27) can be thought of in two ways:<br />
• If the minimum <strong>en</strong>tropy least squares solution with the true data C M exists, (2.27) allows<br />
to construct a stable approximation of this solution using the noisy data.<br />
• If the MELSS with the true data does not exist, either because the s<strong>et</strong> of least squares<br />
solutions is empty or because the least squares solutions are incompatible with the prior,<br />
the regularized problem (2.27) allows to find a “compromise solution”, achieving a tra<strong>de</strong>off<br />
b<strong>et</strong>we<strong>en</strong> the pricing constraints and the prior information.<br />
In the rest of this section we study the regularized calibration problem. Un<strong>de</strong>r our standing<br />
hypothesis that the prior Lévy process has jumps boun<strong>de</strong>d from above and corresponds to
2.5. REGULARIZING THE CALIBRATION PROBLEM 87<br />
an arbitrage free mark<strong>et</strong> (P ∈ L NA ∩ L + B<br />
), we show that the regularized calibration problem<br />
always admits a solution that <strong>de</strong>p<strong>en</strong>ds continuously on the mark<strong>et</strong> data. In addition, we give the<br />
condition that the prior P must satisfy in or<strong>de</strong>r for the solution to be an equival<strong>en</strong>t martingale<br />
measure, and show how the regularization param<strong>et</strong>er α must be chos<strong>en</strong> <strong>de</strong>p<strong>en</strong>ding on the noise<br />
level δ if the regularized solutions are to converge to the solutions of the minimum <strong>en</strong>tropy least<br />
squares calibration problem (2.11).<br />
2.5.1 Properties of regularized solutions<br />
We start with an exist<strong>en</strong>ce theorem showing that if the prior Lévy process has jumps boun<strong>de</strong>d<br />
from above and corresponds to an arbitrage-free mark<strong>et</strong>, the regularized calibration problem<br />
admits a solution.<br />
Theorem 2.13. L<strong>et</strong> P ∈ L NA ∩ L + B<br />
a solution Q ∗ ∈ M ∩ L + B .<br />
for some B > 0. Th<strong>en</strong> the calibration problem (2.27) has<br />
Proof. By Lemma 2.12, there exists Q 0 ∈ M ∩ L with I(Q 0 |P ) < ∞. The solution, if it<br />
exists, must belong to the level s<strong>et</strong> L Jα(Q 0 ) := {Q ∈ L : I(Q|P ) ≤ J α (Q 0 )}. Since J α (Q 0 ) =<br />
‖C M − C Q0 ‖ 2 w + I(Q 0 |P ) < ∞, by Lemma 2.10, L Jα(Q 0 ) is tight and, by Prohorov’s theorem,<br />
weakly relatively compact. Corollary 2.1 <strong>en</strong>tails that I(Q|P ) is weakly lower semicontinuous<br />
with respect to Q. Therefore {Q ∈ P(Ω) : I(Q|P ) ≤ J α (Q 0 )} is weakly closed and since by<br />
Lemma 2.4, M ∩ L + B is weakly closed, M ∩ L+ B ∩ L J α(Q 0 ) is weakly compact. Moreover, by<br />
Lemma 2.2, the squared pricing error is weakly continuous, which <strong>en</strong>tails that J α (Q) is weakly<br />
lower semicontinuous. Therefore, J α (Q) achieves its minimum value on M ∩ L + B ∩ L J α(Q 0 ),<br />
which proves the theorem.<br />
Since every solution Q ∗ of the regularized calibration problem (2.27) has finite relative<br />
<strong>en</strong>tropy with respect to the prior P , necessarily Q ∗ ≪ P . However, Q ∗ need not in g<strong>en</strong>eral be<br />
equival<strong>en</strong>t to the prior. Wh<strong>en</strong> the prior corresponds to the real world (historical) probability,<br />
abs<strong>en</strong>ce of arbitrage is guaranteed if options are priced using an equival<strong>en</strong>t martingale measure.<br />
The next theorem gives a suffici<strong>en</strong>t condition for this equival<strong>en</strong>ce.<br />
Theorem 2.14. L<strong>et</strong> P ∈ L NA ∩ L + B and suppose that the characteristic function ΦP T of P
88 CHAPTER 2. THE CALIBRATION PROBLEM<br />
satisfies<br />
∫ ∞<br />
−∞<br />
|Φ P T (u)|du < ∞ (2.28)<br />
for some T < T 0 , where T 0 is the shortest maturity, pres<strong>en</strong>t in the mark<strong>et</strong> data. Th<strong>en</strong> every<br />
solution Q ∗ of the calibration problem (2.27) satisfies Q ∗ ∼ P .<br />
Remark 2.2. Condition (2.28) implies that the prior Lévy process has a continuous <strong>de</strong>nsity at<br />
time T and all subsequ<strong>en</strong>t times. Two important examples of processes satisfying the condition<br />
(2.28) for all T are<br />
• Processes with non-trivial Gaussian compon<strong>en</strong>t (A > 0). This follows directly from the<br />
Lévy-Khintchine formula (1.1).<br />
• Processes with stable-like behavior of small jumps, that is, processes whose Lévy measure<br />
satisfies<br />
∃β ∈ (0, 2),<br />
lim inf<br />
ε↓0<br />
For proof, see Proposition 28.3 in [87].<br />
(1.20) with α + > 0 and/or α − > 0.<br />
Theorem 2.14 will be prov<strong>en</strong> after the following technical lemma.<br />
∫ ε<br />
ε −β |x| 2 ν(dx) > 0. (2.29)<br />
−ε<br />
This class inclu<strong>de</strong>s tempered stable processes<br />
Lemma 2.15. L<strong>et</strong> P ∈ M ∩ L + B<br />
with characteristic tripl<strong>et</strong> (A, ν, γ) and characteristic expon<strong>en</strong>t<br />
ψ. There exists C < ∞ such that<br />
Proof. From (1.1) and (1.2),<br />
Observe first that<br />
ψ(v − i)<br />
∣ (v − i)v ∣ ≤ C ∀v ∈ R.<br />
ψ(v − i) = − 1 ∫ ∞<br />
2 Av(v − i) + (e i(v−i)x + iv − e x − ive x )ν(dx). (2.30)<br />
−∞<br />
e i(v−i)x + iv − e x − ive x = iv(xe x + 1 − e x ) + θv2 x 2 e x<br />
2<br />
for some θ with |θ| ≤ 1.<br />
Therefore, for all v with |v| ≥ 2,<br />
e i(v−i)x + iv − e x − ive x<br />
∣ (v − i)v ∣ ≤ xex + 1 − e x + x 2 e x . (2.31)
2.5. REGULARIZING THE CALIBRATION PROBLEM 89<br />
On the other hand,<br />
e i(v−i)x + iv − e x − ive x<br />
(v − i)v<br />
= iex (e ivx − 1)<br />
v<br />
− i(ei(v−i)x − 1)<br />
v − i<br />
= −xe x − ivx2<br />
2 eθ 1ivx + x +<br />
i(v − i)x2<br />
e θ 2i(v−i)x<br />
2<br />
with some θ 1 , θ 2 ∈ [0, 1]. Therefore, for all v with |v| ≤ 2,<br />
e i(v−i)x + iv − e x − ive x<br />
∣ (v − i)v ∣ ≤ x(1 − ex ) + x2<br />
2 (v + √ 1 + v 2 e x ) ≤ x(1 − e x ) + x 2 (1 + 2e x ). (2.32)<br />
Since the support of ν is boun<strong>de</strong>d from above, the right-hand si<strong>de</strong>s of (2.31) and (2.32) are<br />
ν-integrable, and the proof of the lemma is compl<strong>et</strong>ed.<br />
Proof of Theorem 2.14. L<strong>et</strong> Q ∗ be a solution of (2.27) with prior P . By Theorem 2.7, there<br />
exists Q 0 ∈ M ∩ L such that Q 0 ∼ P . D<strong>en</strong>ote the characteristic tripl<strong>et</strong> of Q ∗ by (A, ν ∗ , γ ∗ ) and<br />
that of Q 0 by (A, ν 0 , γ 0 ).<br />
L<strong>et</strong> Q x be a Lévy process with characteristic tripl<strong>et</strong><br />
(A, xν 0 + (1 − x)ν ∗ , xγ 0 + (1 − x)γ ∗ ).<br />
From the linearity of the martingale condition (1.2), it follows that for all x ∈ [0, 1], Q x ∈ M∩L.<br />
Since Q ∗ realizes the minimum of J α (Q), necessarily J α (Q x ) − J α (Q ∗ ) ≥ 0 for all x ∈ [0, 1].<br />
Our strategy for proving the theorem is first to show that ‖C M −C Qx ‖ 2 −‖C M −C Q∗ ‖ 2<br />
x<br />
is boun<strong>de</strong>d<br />
as x → 0 and th<strong>en</strong> to show that if I(Qx|P )−I(Q∗ |P )<br />
x<br />
is boun<strong>de</strong>d from below as x → 0, necessarily<br />
Q ∗ ∼ P .<br />
The first step is to prove that the characteristic function Φ ∗ of Q ∗ satisfies the condition<br />
(2.28) for some T < T 0 . If A > 0, this is trivial; suppose therefore that A = 0. In this case,<br />
|Φ ∗ T (u)| = exp(T ∫ ∞<br />
−∞ (cos(ux) − 1)ν∗ (dx)). D<strong>en</strong>ote dν∗<br />
dν P<br />
:= φ ∗ . Since Q ∗ ≪ P , by Theorem<br />
1.5, ∫ ∞<br />
−∞ (√ φ ∗ (x) − 1) 2 ν P (dx) ≤ K < ∞ for some constant K. Therefore, there exists another<br />
constant C > 0 such that<br />
∫<br />
{φ ∗ (x)>C}<br />
(1 − cos(ux))|φ ∗ − 1|ν P (dx) < C
90 CHAPTER 2. THE CALIBRATION PROBLEM<br />
uniformly on u. For all r > 0,<br />
∫ ∞<br />
−∞<br />
∫<br />
(1 − cos(ux))|φ ∗ − 1|ν P (dx) ≤ C +<br />
≤ C + r 2<br />
This implies that<br />
∫ ∞<br />
−∞<br />
∫<br />
{φ ∗ (x)≤C}<br />
{φ ∗ (x)≤C}(1 − cos(ux)) 2 ν P (dx) + 1 2r<br />
(cos(ux) − 1)ν ∗ (dx) ≤ (1 + r)<br />
≤ C + r<br />
∫ ∞<br />
−∞<br />
(1 − cos(ux))|φ ∗ − 1|ν P (dx)<br />
∫ ∞<br />
−∞<br />
∫<br />
{φ ∗ (x)≤C}<br />
(φ ∗ − 1) 2 ν P (dx)<br />
(1 − cos(ux))ν P (dx) + K(√ C + 1) 2<br />
.<br />
2r<br />
(cos(ux) − 1)ν P (dx) + C + K(√ C + 1) 2<br />
for all r > 0. Therefore, if the characteristic function of P satisfies the condition (2.28) for some<br />
T , the characteristic function of Q ∗ will satisfy it for every T ′ > T .<br />
Since P ∈ L NA ∩ L + B , Q x ∈ M ∩ L + B<br />
for all x ∈ [0, 1]. Therefore, condition (1.23) is satisfied<br />
and option prices can be computed by inverting the Fourier transform (1.24):<br />
C Qx (T, K) = (1−Ke −rT ) + + 1 ∫ ∞<br />
2π −∞<br />
e −iv log K+ivrT exp(T (1 − x)ψ∗ (v − i) + T xψ 0 (v − i)) − 1<br />
dv,<br />
iv(1 + iv)<br />
where ψ 0 and ψ ∗ <strong>de</strong>note the characteristic expon<strong>en</strong>ts of Q 0 and Q ∗ . It follows that<br />
2r<br />
C Qx (T, K) − C Q∗ (T, K)<br />
x<br />
= 1 ∫ ∞<br />
2π −∞<br />
e −iv log K+ivrT eT (1−x)ψ∗ (v−i)+T xψ 0 (v−i) − e T ψ∗ (v−i)<br />
dv<br />
iv(1 + iv)x<br />
The fact that Rψ 0 (v − i) ≤ 0 and Rψ ∗ (v − i) ≤ 0 for all v ∈ R tog<strong>et</strong>her with Lemma 2.15<br />
implies that<br />
∣ e−iv log K+ivrT eT (1−x)ψ∗ (v−i)+T xψ 0 (v−i) − e T ψ∗ (v−i)<br />
iv(1 + iv)x<br />
∣<br />
≤ T |eT (1−x)ψ∗ (v−i) ||ψ 0 (v − i) − ψ ∗ (v − i)|<br />
|v(1 + iv)|<br />
≤ T |e T (1−x)ψ∗ (v−i) |C ′<br />
for some constant C ′ . From the dominated converg<strong>en</strong>ce theorem and since Q ∗ satisfies (2.28),<br />
∂C Qx (T,K)<br />
∂x<br />
| x=0 exists and is boun<strong>de</strong>d uniformly on T and K in the mark<strong>et</strong> data s<strong>et</strong>. This in<br />
turn means that ‖C M −C Qx ‖ 2 −‖C M −C Q∗ ‖ 2<br />
x<br />
is boun<strong>de</strong>d as x → 0.<br />
To compl<strong>et</strong>e the proof, it remains to show that if I(Qx|P )−I(Q∗ |P )<br />
x<br />
is boun<strong>de</strong>d from below as<br />
x → 0, necessarily Q ∗ ∼ P . Using the convexity (with respect to ν Q and γ Q ) of the two terms
2.5. REGULARIZING THE CALIBRATION PROBLEM 91<br />
in the expression (2.19) for relative <strong>en</strong>tropy, we have:<br />
I(Q x |P ) − I(Q ∗ |P )<br />
x<br />
{<br />
= T ∫<br />
2<br />
∞<br />
xγ 0 + (1 − x)γ ∗ − γ P − z(xν 0 + (1 − x)ν ∗ − ν P )ν (dz)} P 1 A≠0<br />
2Ax<br />
|z|≤1<br />
{<br />
− T ∫<br />
2<br />
∞<br />
γ ∗ − γ P − (ν ∗ − ν P )ν (dz)} P 1 A≠0<br />
2Ax<br />
≤ T ∞<br />
2A<br />
+ T ∞<br />
x<br />
− T ∞<br />
x<br />
∫ ∞<br />
−∞<br />
∫ ∞<br />
−∞<br />
{ ∫<br />
γ 0 − γ P −<br />
|z|≤1<br />
{(xφ 0 + (1 − x)φ ∗ ) log(xφ 0 + (1 − x)φ ∗ ) − xφ 0 − (1 − x)φ ∗ + 1}ν P (dz)<br />
{φ ∗ log(φ ∗ ) − φ ∗ + 1}ν P (dz)<br />
|z|≤1<br />
(ν 0 − ν P )ν P (dz)} 2<br />
1 A≠0<br />
{<br />
− T ∫<br />
2<br />
∞<br />
γ ∗ − γ P − (ν ∗ − ν P )ν (dz)} P 1 A≠0<br />
2A<br />
|z|≤1<br />
∫<br />
∫<br />
+ T ∞ {φ 0 log(φ 0 ) − φ 0 + 1}ν P (dz) − T ∞<br />
+ T ∞<br />
∫<br />
{φ ∗ >0}<br />
{φ ∗ =0}<br />
{φ ∗ >0}<br />
{φ 0 log(xφ 0 ) − φ 0 }ν P (dz) ≤ I(Q 0 |P ) + T ∞<br />
∫<br />
{φ ∗ log(φ ∗ ) − φ ∗ + 1}ν P (dz)<br />
{φ ∗ =0}<br />
(φ 0 log x − 1)ν P (dx)<br />
Since J α (Q x ) − J α (Q ∗ ) ≥ 0, this expression must be boun<strong>de</strong>d from below. Therefore, ν P ({φ ∗ =<br />
0}) = 0, and Proposition 1.5 <strong>en</strong>tails that P ≪ Q ∗ .<br />
Continuity of solutions with respect to data<br />
Theorem 2.16. L<strong>et</strong> {C n M } n≥1 and C M be data s<strong>et</strong>s of option prices such that<br />
lim<br />
n<br />
‖C n M − C M ‖ w → 0.<br />
L<strong>et</strong> P ∈ L NA ∩ L + B , α > 0, and for each n, l<strong>et</strong> Q n be a solution of the calibration problem<br />
(2.27) with data C n M , prior Lévy process P and regularization param<strong>et</strong>er α. Th<strong>en</strong> {Q n} n≥1 has<br />
a subsequ<strong>en</strong>ce, converging weakly to a process Q ∗ ∈ M ∩ L + B<br />
, and the limit of every converging<br />
subsequ<strong>en</strong>ce of {Q n } n≥1 is a solution of calibration problem (2.27) with data C M , prior P and<br />
regularization param<strong>et</strong>er α.<br />
Proof. By Lemma 2.12, there exists Q 0 ∈ M ∩ L with I(Q 0 |P ) < ∞. Since, by Lemma 2.2,<br />
‖C Q0 − C n M ‖2 ≤ S 2 0 for all n, αI(Q n|P ) ≤ S 2 0 + αI(Q0 |P ) for all n. Therefore, by Lemmas 2.4
92 CHAPTER 2. THE CALIBRATION PROBLEM<br />
and 2.10 and Prohorov’s theorem, {Q n } n≥1 is weakly relatively compact, which proves the first<br />
part of the theorem.<br />
Choose any subsequ<strong>en</strong>ce of {Q n } n≥1 , converging weakly to a process Q ∗ ∈ M ∩ L + B . , To<br />
simplify notation, this subsequ<strong>en</strong>ce is <strong>de</strong>noted again by {Q n } n≥1 . The triangle inequality and<br />
Lemma 2.2 imply that<br />
‖C Qn − C n M‖ 2 −−−→<br />
n→∞ ‖CQ∗ − C M ‖ 2 (2.33)<br />
Since, by Lemma 2.11, the relative <strong>en</strong>tropy functional is weakly lower semicontinuous in Q,<br />
for every Q ∈ M ∩ L + B ,<br />
‖C Q∗ − C M ‖ + αI(Q|P ) ≤ lim inf{‖C Qn − C n<br />
n<br />
M‖ 2 + αI(Q n |P )}<br />
≤ lim inf{‖C Q − C n<br />
n<br />
M‖ 2 + αI(Q|P )}<br />
= lim<br />
n<br />
‖C Q − C n M‖ 2 + αI(Q|P )<br />
= ‖C Q − C M ‖ 2 + αI(Q|P ),<br />
where the second inequality follows from the fact that Q m is the solution of the calibration<br />
problem with data C m M<br />
and the last line follows from the triangle inequality.<br />
2.5.2 Converg<strong>en</strong>ce of regularized solutions<br />
In this section we study the converg<strong>en</strong>ce of solutions of the regularized calibration problem<br />
(2.27) to the solutions of the minimum <strong>en</strong>tropy least squares calibration problem (2.11) wh<strong>en</strong><br />
the noise level in the data t<strong>en</strong>ds to zero.<br />
Theorem 2.17. L<strong>et</strong> {C δ M } be a family of data s<strong>et</strong>s of option prices such that ‖C M − C δ M ‖ ≤ δ,<br />
l<strong>et</strong> P ∈ L NA ∩ L + B and suppose that there exist a solution Q of problem (2.4) with data C M (a<br />
least squares solution) such that I(Q|P ) < ∞.<br />
and<br />
If ‖C Q − C M ‖ = 0 (the constraints are reproduced exactly), l<strong>et</strong> α(δ) be such that α(δ) → 0<br />
δ2<br />
δ<br />
α(δ)<br />
→ 0 as δ → 0. Otherwise, l<strong>et</strong> α(δ) be such that α(δ) → 0 and<br />
Th<strong>en</strong> every sequ<strong>en</strong>ce {Q δ k}, where δ k → 0 and Q δ k<br />
α(δ)<br />
→ 0 as δ → 0.<br />
is a solution of problem (2.27) with data<br />
C δ k<br />
M , prior P and regularization param<strong>et</strong>er α(δ k), has a weakly converg<strong>en</strong>t subsequ<strong>en</strong>ce. The<br />
limit of every converg<strong>en</strong>t subsequ<strong>en</strong>ce is a solution of problem (2.11) (MELSS) with data C M<br />
and prior P . If such a MELSS Q + is unique th<strong>en</strong> lim δ→0 Q δ = Q + .
2.5. REGULARIZING THE CALIBRATION PROBLEM 93<br />
Proof. By Lemma 2.6, there exists at least one MELSS with data C M and prior P , that has<br />
finite relative <strong>en</strong>tropy with respect to the prior. L<strong>et</strong> Q + be any such MELSS. Since Q δ k<br />
solution of the regularized problem, for every k,<br />
is the<br />
‖C Qδk − C δ k<br />
M ‖2 + α(δ k )I(Q δ k<br />
|P ) ≤ ‖C Q+ − C δ k<br />
M ‖2 + α(δ k )I(Q + |P ).<br />
Using the fact that for every r > 0 and for every x, y ∈ R,<br />
(1 − r)x 2 + (1 − 1/r)y 2 ≤ (x + y) 2 ≤ (1 + r)x 2 + (1 + 1/r)y 2 ,<br />
we obtain that<br />
(1 − r)‖C Qδk − C M ‖ 2 + α(δ k )I(Q δ k<br />
|P )<br />
≤ (1 + r)‖C Q+ − C M ‖ 2 + 2δ2 k<br />
r + α(δ k)I(Q + |P ), (2.34)<br />
and since Q + is a least squares solution with data C M , this implies for all r ∈ (0, 1) that<br />
α(δ k )I(Q δ k<br />
|P ) ≤ 2r‖C Q+ − C M ‖ 2 + 2δ2 k<br />
r + α(δ k)I(Q + |P ). (2.35)<br />
If the constraints are reproduced exactly, th<strong>en</strong> ‖C Q+ −C M ‖ = 0 and with the choice r = 1/2,<br />
the above expression yields:<br />
I(Q δ k<br />
|P ) ≤<br />
4δ2 k<br />
α(δ k ) + I(Q+ |P ).<br />
Since, by the theorem’s statem<strong>en</strong>t, in the case of exact constraints<br />
δk<br />
2<br />
α(δ k )<br />
→ 0, this implies that<br />
lim sup{I(Q δ k<br />
|P )} ≤ I(Q + |P ). (2.36)<br />
k<br />
If ‖C Q+ − C M ‖ > 0 (misspecified mo<strong>de</strong>l) th<strong>en</strong> the right-hand si<strong>de</strong> of (2.35) achieves its<br />
maximum wh<strong>en</strong> r = δ k ‖C Q+ − C M ‖ −1 , in which case we obtain<br />
I(Q δ k<br />
|P ) ≤<br />
Since in the case of approximate constraints,<br />
4δ k<br />
α(δ k ) ‖CQ+ − C M ‖ + I(Q + |P ).<br />
δ k<br />
α(δ k )<br />
→ 0, we obtain (2.36) once again.<br />
Inequality (2.36) implies in particular that I(Q δ k|P ) is uniformly boun<strong>de</strong>d, which proves,<br />
by Lemmas 2.10 and 2.4, that {Q δ k} is relatively weakly compact in M ∩ L + B .
94 CHAPTER 2. THE CALIBRATION PROBLEM<br />
Choose a subsequ<strong>en</strong>ce of {Q δ k}, converging weakly to Q ∗ ∈ M ∩ L + B<br />
. To simplify notation,<br />
this subsequ<strong>en</strong>ce is <strong>de</strong>noted again by {Q δ k} k≥1 . Substituting r = δ into Equation (2.34) and<br />
making k t<strong>en</strong>d to infinity shows that<br />
Tog<strong>et</strong>her with Lemma 2.2 this implies that<br />
lim sup ‖C Qδk − C M ‖ 2 ≤ ‖C Q+ − C M ‖ 2 .<br />
k<br />
‖C Q∗ − C M ‖ 2 ≤ ‖C Q+ − C M ‖ 2 ,<br />
h<strong>en</strong>ce Q ∗ is a least squares solution. By weak lower semicontinuity of I (cf. Lemma 2.11) and<br />
using (2.36),<br />
I(Q ∗ |P ) ≤ lim inf<br />
k<br />
I(Q δ k<br />
|P ) ≤ lim sup I(Q δ k<br />
|P ) ≤ I(Q + |P ),<br />
k<br />
which means that Q ∗ is a MELSS. The last assertion of the theorem follows from the fact that<br />
in this case every subsequ<strong>en</strong>ce of {Q δ k} has a further subsequ<strong>en</strong>ce converging toward Q + .
Chapter 3<br />
Numerical implem<strong>en</strong>tation of the<br />
calibration algorithm<br />
Before solving the calibration problem (2.27) numerically, we reformulate it as follows:<br />
• The calibration problem (2.27) is expressed in terms of the characteristic tripl<strong>et</strong>s (A, ν Q , γ Q )<br />
and (A, ν P , γ P ) of the prior Lévy process and the solution. This can be done using Equations<br />
(1.1), (1.25) and (1.26) (option pricing by Fourier transform) and Equation (2.19)<br />
(expression of the relative <strong>en</strong>tropy in terms of characteristic tripl<strong>et</strong>s).<br />
• The Lévy measure ν Q is discr<strong>et</strong>ized (approximated by a finite-dim<strong>en</strong>sional object). This<br />
discussed in <strong>de</strong>tail in Section 3.1.<br />
The prior Lévy process P is a crucial ingredi<strong>en</strong>t that must be specified by the user. Section<br />
3.2 suggests differ<strong>en</strong>t ways to do this and studies the effect of a misspecification of the prior<br />
on the solutions of the calibration problem. Section 3.3 discusses the m<strong>et</strong>hods to choose the<br />
regularization param<strong>et</strong>er α based on the data and Section 3.4 treats the choice of weights w i of<br />
differ<strong>en</strong>t options. Section 3.5 <strong>de</strong>tails the numerical algorithm that we use to solve the calibration<br />
problem once the prior, the regularization param<strong>et</strong>er and the weights have be<strong>en</strong> fixed.<br />
The calibration algorithm, including the automatic choice of the regularization param<strong>et</strong>er,<br />
has be<strong>en</strong> implem<strong>en</strong>ted in a computer program levycalibration and various tests have be<strong>en</strong><br />
carried out, both on simulated option prices (computed in a known expon<strong>en</strong>tial Lévy mo<strong>de</strong>l)<br />
and using real mark<strong>et</strong> data. Section 3.6 discusses the results of these tests.<br />
95
96 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
3.1 Discr<strong>et</strong>izing the calibration problem<br />
A conv<strong>en</strong>i<strong>en</strong>t way to discr<strong>et</strong>ize the calibration problem is to take a prior Lévy process P with<br />
Lévy measure supported by a finite number of points:<br />
ν P =<br />
M−1<br />
∑<br />
k=0<br />
p k δ {xk }(dx). (3.1)<br />
In this case, by Proposition 1.5, the Lévy measure of the solution necessarily satisfies ν Q ≪ ν P ,<br />
therefore<br />
ν Q =<br />
M−1<br />
∑<br />
k=0<br />
q k δ {xk }(dx), (3.2)<br />
that is, the solution belongs to a finite-dim<strong>en</strong>sional space and can be computed using a numerical<br />
optimization algorithm. The advantage of this discr<strong>et</strong>ization approach is that we are solving the<br />
same problem (2.27), only with a differ<strong>en</strong>t prior measure, so all results of Section 2.5 (exist<strong>en</strong>ce<br />
of solution, continuity <strong>et</strong>c.) hold in the finite-dim<strong>en</strong>sional case.<br />
Taking Lévy measures of the form (3.1) we implicitly restrict the class of possible solutions<br />
to Lévy processes with boun<strong>de</strong>d jumps and finite jump int<strong>en</strong>sity. However, in this section we<br />
will see that this restriction is not as important as it seems: the solution of a calibration problem<br />
with any prior can be approximated (in the weak s<strong>en</strong>se) by a sequ<strong>en</strong>ce of solutions of calibration<br />
problems with priors having Lévy measures of the form (3.1). Moreover, in Section 3.6.1 we<br />
will observe empirically that smiles produced by infinite int<strong>en</strong>sity mo<strong>de</strong>ls can be calibrated with<br />
arbitrary precision by such jump-diffusion mo<strong>de</strong>ls.<br />
We start with a lemma showing that every Lévy process can be approximated by Lévy<br />
processes with atomic Lévy measures.<br />
Lemma 3.1. L<strong>et</strong> P be a Lévy process with characteristic tripl<strong>et</strong> (A, ν, γ) with respect to a<br />
continuous boun<strong>de</strong>d truncation function h, satisfying h(x) = x in a neighborhood of 0, and for<br />
every n, l<strong>et</strong> P n be a Lévy process with characteristic tripl<strong>et</strong> (A, ν n , γ) (with respect to the same<br />
truncation function) where<br />
ν n :=<br />
2n∑<br />
k=1<br />
δ {xk }(dx) µ([x k − 1/ √ n, x k + 1/ √ n))<br />
1 ∧ x 2 ,<br />
k<br />
x k := (2(k − n) − 1)/ √ n and µ is a finite measure on R, <strong>de</strong>fined by µ(B) := ∫ B (1 ∧ x2 )ν(dx)<br />
for all B ∈ B(R). Th<strong>en</strong> P n ⇒ P .
3.1. DISCRETIZING THE CALIBRATION PROBLEM 97<br />
Proof. For a function f ∈ C b (R), <strong>de</strong>fine<br />
⎧<br />
0, x ≥ 2 √ n,<br />
⎪⎨<br />
f n (x) := 0, x < −2 √ n,<br />
⎪⎩<br />
f(x i ), x ∈ [x i − 1/ √ n, x i + 1/ √ n) with 1 ≤ i ≤ 2n,<br />
Th<strong>en</strong> clearly<br />
∫<br />
∫<br />
(1 ∧ x 2 )f(x)ν n (dx) =<br />
f n (x)µ(dx).<br />
Since f(x) is continuous, f n (x) → f(x) for all x and since f is boun<strong>de</strong>d, the dominated converg<strong>en</strong>ce<br />
theorem implies that<br />
lim<br />
n<br />
∫<br />
(1 ∧ x 2 )f(x)ν n (dx) = lim<br />
n<br />
∫<br />
∫<br />
f n (x)µ(dx) =<br />
∫<br />
f(x)µ(dx) =<br />
(1 ∧ x 2 )f(x)ν(dx). (3.3)<br />
With f(x) ≡ h2 (x)<br />
1∧x 2<br />
the above yields:<br />
∫<br />
∫<br />
lim h 2 (x)ν n (dx) =<br />
n<br />
h 2 (x)ν(dx).<br />
On the other hand, for every g ∈ C b (R) such that g(x) ≡ 0 on a neighborhood of 0, f(x) := g(x)<br />
1∧x 2<br />
belongs to C b (R). Therefore, from Equation (3.3), lim<br />
n<br />
∫<br />
g(x)νn (dx) = ∫ g(x)ν(dx), and by<br />
Proposition (1.7), P n ⇒ P .<br />
Theorem 3.2. L<strong>et</strong> P, {P n } n≥1 ⊂ L NA ∩ L + B such that P n ⇒ P , l<strong>et</strong> α > 0, l<strong>et</strong> C M be a data<br />
s<strong>et</strong> of option prices and for each n l<strong>et</strong> Q n be a solution of the calibration problem (2.27) with<br />
prior P n , regularization param<strong>et</strong>er α and data C M . Th<strong>en</strong> the sequ<strong>en</strong>ce {Q n } n≥1 has a weakly<br />
converg<strong>en</strong>t subsequ<strong>en</strong>ce and the limit of every weakly converg<strong>en</strong>t subsequ<strong>en</strong>ce of {Q n } n≥1 is a<br />
solution of the calibration problem (2.27) with prior P .<br />
Proof. By Lemma 2.12, there exists C < ∞ such that for every n, one can find ˜Q n ∈ M∩L with<br />
I( ˜Q n |P n ) ≤ C. Since, by Lemma 2.2, ‖C ˜Q n<br />
− C M ‖ 2 w ≤ S 2 0 for every n and Q n is the solution<br />
of the calibration problem, I(Q n |P n ) ≤ S0 2 /α + C < ∞ for every n. Therefore, by Lemma<br />
2.10, {Q n } is tight and, by Prohorov’s theorem and Lemma 2.4, weakly relatively compact in<br />
M ∩ L + B . Choose a subsequ<strong>en</strong>ce of {Q n}, converging weakly to Q ∈ M ∩ L + B<br />
. To simplify<br />
notation, this subsequ<strong>en</strong>ce is also <strong>de</strong>noted by {Q n } n≥1 . It remains to show that Q is in<strong>de</strong>ed a<br />
solution of the calibration problem with prior P .
98 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
Lemma 2.11 <strong>en</strong>tails that<br />
I(Q, P ) ≤ lim inf<br />
n I(Q n, P n ), (3.4)<br />
and since, by Lemma 2.2, the pricing error is weakly continuous, we also have<br />
‖C Q − C M ‖ 2 w + αI(Q, P ) ≤ lim inf<br />
n {‖CQn − C M ‖ 2 w + αI(Q n , P n )}. (3.5)<br />
L<strong>et</strong> φ ∈ C b (Ω) with φ ≥ 0 and E P [φ] = 1. Without loss of g<strong>en</strong>erality we can suppose that for<br />
every n, E Pn [φ] > 0 and therefore Q ′ n, <strong>de</strong>fined by Q ′ n(B) := EPn [φ1 B ]<br />
, is a probability measure<br />
E Pn [φ]<br />
on Ω. Clearly, Q ′ n converges weakly to Q ′ <strong>de</strong>fined by Q ′ (B) := E P [φ1 B ]. Therefore, by Lemma<br />
2.2,<br />
Moreover,<br />
lim<br />
n<br />
I(Q ′ n|P n ) = lim<br />
n<br />
∫<br />
Ω<br />
lim<br />
n<br />
‖C Q′ n<br />
− C M ‖ 2 w = ‖C Q′ − C M ‖ 2 w. (3.6)<br />
φ<br />
E Pn [φ] log<br />
= lim<br />
n<br />
1<br />
E Pn [φ]<br />
φ<br />
E Pn [φ] dP n<br />
∫<br />
φ log φdP n − lim<br />
n<br />
Ω<br />
∫ ∫<br />
log φdP n = φ log φdP. (3.7)<br />
Ω<br />
Ω<br />
For the rest of this proof, for every φ ∈ L 1 (P ) with φ ≥ 0 and E P [φ] = 1 l<strong>et</strong> Q φ <strong>de</strong>note the<br />
probability measure on Ω, <strong>de</strong>fined by Q φ (B) := E P [φ1 B ] for every B ∈ F. Using (3.5–3.7) and<br />
the optimality of Q n , we obtain that for every φ ∈ C b (Ω) with φ ≥ 0 and E P [φ] = 1,<br />
‖C Q − C M ‖ 2 w + I(Q, P ) ≤ ‖C Q φ<br />
− C M ‖ 2 w + I(Q φ |P ) (3.8)<br />
To compl<strong>et</strong>e the proof of the theorem, we must g<strong>en</strong>eralize this inequality to all φ ∈ L 1 (P ) with<br />
φ ≥ 0 and E P [φ] = 1.<br />
First, l<strong>et</strong> φ ∈ L 1 (P ) ∩ L ∞ (P ) with φ ≥ 0 and E P [φ] = 1. Th<strong>en</strong> there exists a sequ<strong>en</strong>ce<br />
{φ n } ⊂ C b (Ω) such that φ n → φ in L 1 (P ), φ n ≥ 0 for all n and φ n are boun<strong>de</strong>d in L ∞ norm<br />
uniformly on n. Moreover, φ ′ n := φ n /E P [φ n ] also belongs to L 1 (P ), is positive and φ ′ n<br />
because by the triangle inequality,<br />
‖φ ′ n − φ‖ L 1 ≤<br />
1 (<br />
‖φn<br />
E P − φ‖<br />
[φ n ]<br />
L 1 + ‖φ − φE P )<br />
[φ n ]‖ L 1 −−−→ 0.<br />
n→∞<br />
In addition, it is easy to see that Q φ ′ n<br />
⇒ Q φ . Therefore,<br />
L 1 (P )<br />
−−−→ φ<br />
lim<br />
n<br />
‖C Q φ ′ n − C M ‖ 2 w = ‖C Q φ<br />
− C M ‖ 2 w
3.2. CHOICE OF THE PRIOR 99<br />
Since φ ′ n are boun<strong>de</strong>d in L ∞ norm uniformly on n, φ ′ n log φ ′ n is also boun<strong>de</strong>d and the dominated<br />
converg<strong>en</strong>ce theorem implies that lim n I(Q φ ′ n<br />
|P ) = I(Q φ |P ). Passing to the limit in (3.8), we<br />
obtain that this inequality holds for every φ ∈ L 1 (P ) ∩ L ∞ (P ) with φ ≥ 0 and E P [φ] = 1.<br />
L<strong>et</strong> us now choose a nonnegative φ ∈ L 1 (P ) with E P [φ] = 1. If I(Q φ |P ) = ∞ th<strong>en</strong> surely<br />
(3.8) holds, therefore we can suppose I(Q φ |P ) < ∞. L<strong>et</strong> φ n = φ ∧ n. Th<strong>en</strong> φ n → φ in L 1 (P )<br />
because<br />
∫<br />
‖φ n − φ‖ L 1 ≤<br />
φ≥n<br />
∫<br />
φdP =<br />
φ≥n<br />
D<strong>en</strong>oting φ ′ n := φ n /E P [φ n ] as above, we obtain that<br />
φ log φ<br />
log φ dP ≤ I(Q φ|P )<br />
log n → 0.<br />
lim<br />
n<br />
‖C Q φ ′ n − C M ‖ 2 w = ‖C Q φ<br />
− C M ‖ 2 w<br />
Since, for a suffici<strong>en</strong>tly large n, |φ n (x) log φ n (x)| ≤ |φ(x) log φ(x)|, we can once again apply the<br />
dominated converg<strong>en</strong>ce theorem:<br />
∫<br />
lim φ ′<br />
n<br />
n log φ ′ 1<br />
ndP =<br />
lim n E P [φ n ] lim n<br />
∫<br />
∫<br />
φ n log φ n dP − lim log E P [φ n ] =<br />
n<br />
φ log φdP<br />
Therefore, by passage to the limit, (3.8) holds for all φ ∈ L 1 (P ) with φ ≥ 0 and E P [φ] = 1,<br />
which compl<strong>et</strong>es the proof of the theorem.<br />
To approximate numerically the solution of the calibration problem (2.27) with a giv<strong>en</strong> prior<br />
P , we need to construct, using Lemma 3.1, an approximating sequ<strong>en</strong>ce {P n } of Lévy processes<br />
with atomic measures such that P n ⇒ P . The sequ<strong>en</strong>ce {Q n } of solutions corresponding to this<br />
sequ<strong>en</strong>ce of priors will converge (in the s<strong>en</strong>se of Theorem 3.2) to a solution of the calibration<br />
problem with prior P .<br />
3.2 Choice of the prior Lévy process<br />
The prior Lévy process must, g<strong>en</strong>erally speaking, reflect the user’s view of the mo<strong>de</strong>l. It is<br />
one of the most important ingredi<strong>en</strong>ts of the calibration m<strong>et</strong>hod and cannot be <strong>de</strong>termined<br />
compl<strong>et</strong>ely automatically because the choice of the prior has a strong influ<strong>en</strong>ce on the outcome<br />
of the calibration. The user should therefore specify a characteristic tripl<strong>et</strong> (A P , ν P , γ P ) of<br />
the prior P . A natural solution, justified by the economic consi<strong>de</strong>rations of Section 2.3 is<br />
to take the historical probability, resulting from statistical estimation of an expon<strong>en</strong>tial Lévy
100 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
mo<strong>de</strong>l from the time series of ass<strong>et</strong> r<strong>et</strong>urns. Since, un<strong>de</strong>r the conditions of Theorem 2.14,<br />
the calibration procedure yields a martingale probability equival<strong>en</strong>t to the prior, the choice<br />
of historical probability as prior <strong>en</strong>sures the abs<strong>en</strong>ce of arbitrage opportunity involving stock<br />
and options in the calibrated mo<strong>de</strong>l. Estimation of expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls is not discussed<br />
here and interested rea<strong>de</strong>r is referred to [27, Chapter 7].<br />
Specific expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls<br />
are discussed in [57] (Merton mo<strong>de</strong>l), [79] (g<strong>en</strong>eralized hyperbolic mo<strong>de</strong>l) and [21] (CGMY or<br />
tempered stable mo<strong>de</strong>l). [9] and [12] treat more g<strong>en</strong>eral jump-diffusion type mo<strong>de</strong>ls.<br />
To <strong>en</strong>sure the stability of calibrated Lévy measures over time, one can systematically choose<br />
the calibrated expon<strong>en</strong>tial Lévy mo<strong>de</strong>l of the previous day as today’s prior. This choice guarantees<br />
that the curr<strong>en</strong>t calibrated Lévy measure will be altered in the least possible way, to<br />
accommodate the arrival of new option pricing information.<br />
Alternatively, the prior can simply correspond to a mo<strong>de</strong>l that seems “reasonable” to the<br />
user (e.g. an analyst). In this case our calibration m<strong>et</strong>hod may be se<strong>en</strong> as a way to make the<br />
smallest possible change in this mo<strong>de</strong>l to take into account the observed option prices.<br />
Wh<strong>en</strong> the user does not have such <strong>de</strong>tailed views, it should be possible to g<strong>en</strong>erate a refer<strong>en</strong>ce<br />
measure P automatically from options data. To do this we choose an auxiliary mo<strong>de</strong>l Q(θ) (e.g.<br />
Merton mo<strong>de</strong>l) <strong>de</strong>scribed by a finite-dim<strong>en</strong>sional param<strong>et</strong>er vector θ and calibrate it to data<br />
using the least squares procedure:<br />
θ ∗ = arg min<br />
θ<br />
‖C Q(θ) − C M ‖ 2 w (3.9)<br />
It is g<strong>en</strong>erally not a good i<strong>de</strong>a to recalibrate this param<strong>et</strong>ric mo<strong>de</strong>l every day, because in this<br />
case the prior will compl<strong>et</strong>ely lose its stabilizing role. On the contrary, one should try to find<br />
typical param<strong>et</strong>er values for a particular mark<strong>et</strong> (e.g.<br />
averages over a long period) and fix<br />
them once and for all. Since the objective function in (3.9) is usually not convex, a simple<br />
gradi<strong>en</strong>t <strong>de</strong>sc<strong>en</strong>t procedure may not give the global minimum. However, the solution Q(θ ∗ ) will<br />
be corrected at later stages and should only be viewed as a way to regularize the optimization<br />
problem (2.4) so the minimization procedure at this stage need not be precise.<br />
Theorem 3.2 shows that the calibrated solutions are continuous with respect to the prior,<br />
that is, small changes in the prior process induce small changes in the solutions.<br />
To assess<br />
empirically the influ<strong>en</strong>ce of finite changes in the prior on the result of calibration, we have<br />
carried out two series of numerical tests. In the first series of tests, Lévy measure was calibrated
3.2. CHOICE OF THE PRIOR 101<br />
twice to the same s<strong>et</strong> of option prices using prior mo<strong>de</strong>ls that were differ<strong>en</strong>t but close to each<br />
other (see Section 3.5.3 for the <strong>de</strong>scription of the calibration algorithm). Namely, in the test A<br />
we used Merton mo<strong>de</strong>l with diffusion volatility σ = 0.2, zero mean jump size, jump standard<br />
<strong>de</strong>viation of 0.1 and int<strong>en</strong>sity λ = 3, whereas in the test B all the param<strong>et</strong>ers except int<strong>en</strong>sity<br />
had the same values and the int<strong>en</strong>sity was equal to 2. The result of the test is shown in<br />
Figure 3.1. The solid curves correspond to calibrated measures and the dotted ones <strong>de</strong>pict<br />
the prior measures. Notice that there is very little differ<strong>en</strong>ce b<strong>et</strong>we<strong>en</strong> the calibrated measures,<br />
which means that, in harmony with Theorem 3.2, the result of calibration is robust to minor<br />
variations of the param<strong>et</strong>ers of prior measure, as long as its qualitative shape remains the same.<br />
12<br />
10<br />
Test A<br />
8<br />
6<br />
4<br />
Test B<br />
2<br />
0<br />
−1.2 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6<br />
Figure 3.1: Lévy measures calibrated to the same data s<strong>et</strong> using two prior measures similar to<br />
each other. Solid curves correspond to calibrated measures and dotted ones <strong>de</strong>pict the priors.<br />
In the second series of tests we have again calibrated the Lévy measure twice to the same<br />
s<strong>et</strong> of option prices, this time taking two radically differ<strong>en</strong>t priors. Namely, in test A we used<br />
Merton mo<strong>de</strong>l with diffusion volatility σ = 0.2, zero mean jump size, jump standard <strong>de</strong>viation<br />
of 0.1 and int<strong>en</strong>sity λ = 2, whereas in test B we took a uniform Lévy measure on the interval<br />
[−1, 0.5] with int<strong>en</strong>sity λ = 2. The calibrated measures (solid lines in Figure 3.2) are still similar<br />
but exhibit much more differ<strong>en</strong>ces than in the first series of tests. Not only they are differ<strong>en</strong>t
102 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
in the middle, but also the behavior of tails of the calibrated Lévy measure with uniform prior<br />
is more erratic than in the case where Merton mo<strong>de</strong>l was used as prior (see Figure 3.2, right<br />
graph).<br />
Comparison of Figures 3.1 and 3.2 shows that the exact values of param<strong>et</strong>ers of the prior<br />
mo<strong>de</strong>l are not very important, but it is crucial to find the right shape of the prior.<br />
8<br />
10 2 Test A<br />
7<br />
6<br />
5<br />
Test A<br />
10 1<br />
10 0<br />
4<br />
10 −1<br />
Test B<br />
3<br />
2<br />
1<br />
Test B<br />
10 −2<br />
10 −3<br />
0<br />
−1.2 −1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6<br />
10 −4<br />
−0.5 −0.4 −0.3 −0.2 −0.1 0<br />
Figure 3.2: Lévy measures calibrated to the same data s<strong>et</strong> using two qualitatively differ<strong>en</strong>t<br />
priors. Solid curves correspond to calibrated measures and dotted ones <strong>de</strong>pict the priors. Right<br />
graph: zoom of the left tail of Lévy <strong>de</strong>nsities on log scale.<br />
3.3 Choice of the regularization param<strong>et</strong>er<br />
Theorem 2.17 of the preceding chapter suggests that for the regularization m<strong>et</strong>hod to converge,<br />
the param<strong>et</strong>er choice strategy α(δ) must satisfy the following limiting relations, wh<strong>en</strong> the data<br />
error δ goes to zero:<br />
• α(δ) → 0,<br />
• If the exact data C M is attainable by the mo<strong>de</strong>l, one must have<br />
δ 2<br />
α(δ)<br />
δ<br />
α(δ) → 0.<br />
→ 0 and if not,
3.3. CHOICE OF THE REGULARIZATION PARAMETER 103<br />
A typical example of a param<strong>et</strong>er choice rule that works in both attainable and unattainable<br />
cases would be<br />
α(δ) = Cδ µ (3.10)<br />
with any C > 0 and any µ ∈ (0, 1).<br />
However, in real calibration problems the error level δ is fixed and finite and rules of type<br />
(3.10) do not tell us how we should choose α in this case. Good performance and error control<br />
for finite values of δ is achieved by using the so called a posteriori param<strong>et</strong>er choice rules<br />
(α <strong>de</strong>p<strong>en</strong>ds not only on δ but also on the data CM δ ), the most wi<strong>de</strong>ly used of which is the<br />
discrepancy principle, originally <strong>de</strong>veloped by Morozov for Tikhonov regularization in Banach<br />
spaces [74, 75], see also [40]. In the rest of this section we apply this principle and its variants<br />
that is b<strong>et</strong>ter suited for nonlinear problems to our <strong>en</strong>tropic regularization m<strong>et</strong>hod.<br />
3.3.1 A posteriori param<strong>et</strong>er choice rules for attainable calibration problems<br />
In this subsection we make the following standing assumptions:<br />
1. The prior Lévy process corresponds to an arbitrage-free mo<strong>de</strong>l with jumps boun<strong>de</strong>d from<br />
above by B: P ∈ L NA ∩ L + B<br />
measure Q ∗ ).<br />
(this implies the exist<strong>en</strong>ce of a minimal <strong>en</strong>tropy martingale<br />
2. There exists a solution Q + of problem (2.11) with data C M (minimum <strong>en</strong>tropy least<br />
squares solution) such that<br />
I(Q + |P ) < ∞<br />
and<br />
‖C Q+ − C M ‖ w = 0<br />
(the data is attainable by an exp-Lévy mo<strong>de</strong>l).<br />
3. There exists δ 0 such that<br />
ε max := inf<br />
δ≤δ 0<br />
‖C Q∗ − C δ M‖ 2 w > δ 2 0. (3.11)<br />
Remark 3.1. In the condition (3.11), δ 0 can be se<strong>en</strong> as the highest possible noise level of all data<br />
s<strong>et</strong>s that we consi<strong>de</strong>r. If, for some δ, ‖C Q∗ − C δ M ‖ w < δ 0 th<strong>en</strong> either Q ∗ is already suffici<strong>en</strong>tly<br />
close to the solution or the noise level is so high that all the useful information in the data is
104 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
compl<strong>et</strong>ely blurred and the data does not allow to construct a b<strong>et</strong>ter approximation of the true<br />
solution than Q ∗ .<br />
L<strong>et</strong> Q δ α <strong>de</strong>note a solution of the regularized problem (2.27) with data C δ M<br />
param<strong>et</strong>er α. The function<br />
and regularization<br />
ε δ (α) := ‖C Qδ α<br />
− C δ M‖ 2 w<br />
is called the discrepancy function of the calibration problem (2.27). Note that since this problem<br />
can have many solutions, ε δ (α) is a priori a multivalued function. Giv<strong>en</strong> two constants c 1 and<br />
c 2 satisfying<br />
the discrepancy principle can be stated as follows:<br />
1 < c 1 ≤ c 2 < εmax<br />
δ0<br />
2 , (3.12)<br />
Discrepancy principle<br />
For a giv<strong>en</strong> noise level δ, choose α > 0 that satisfies<br />
δ 2 < c 1 δ 2 ≤ ε δ (α) ≤ c 2 δ 2 , (3.13)<br />
If, for a giv<strong>en</strong> α, the discrepancy function has several possible values, the above inequalities<br />
must be satisfied by each one of them.<br />
The intuition behind this principle is as follows. We would like to find a solution Q of<br />
the equation C Q = C M . Since the error level in the data is of or<strong>de</strong>r δ, it is the best possible<br />
precision that we can ask for in this context, so it does not make s<strong>en</strong>se to calibrate the noisy<br />
data CM δ with a precision higher than δ. Therefore, we try to solve ‖C Qδ α − C<br />
δ<br />
M<br />
‖ 2 w ≤ δ 2 . In<br />
or<strong>de</strong>r to gain stability we must sacrifice some precision compared to δ, therefore, we choose a<br />
constant c with 1 c, for example, c = 1.1 and look for Q δ α in the level s<strong>et</strong><br />
‖C Qδ α<br />
− CM‖ δ 2 w ≤ cδ 2 . (3.14)<br />
Since, on the other hand, by increasing precision, we <strong>de</strong>crease the stability, the highest stability<br />
is obtained wh<strong>en</strong> the inequality in (3.14) is replaced by equality and we obtain<br />
ε δ (α) ≡ ‖C Qδ α<br />
− CM‖ δ 2 w = cδ 2 .<br />
To make the numerical solution of the equation easier, we do not impose a strict value of the<br />
discrepancy function but allow it to lie b<strong>et</strong>we<strong>en</strong> two bounds, obtaining (3.13).
3.3. CHOICE OF THE REGULARIZATION PARAMETER 105<br />
Supposing that an α solving (3.13) exists, it is easy to prove the converg<strong>en</strong>ce of the regularized<br />
solutions to the minimal <strong>en</strong>tropy least squares solution, wh<strong>en</strong> the regularization param<strong>et</strong>er<br />
is chos<strong>en</strong> using the discrepancy principle.<br />
Proposition 3.3. Suppose that the hypotheses 1–3 of page 103 are satisfied and l<strong>et</strong> c 1 and c 2 be<br />
as in (3.12). L<strong>et</strong> {C δ k<br />
M } k≥1 be a sequ<strong>en</strong>ce of data s<strong>et</strong>s such that ‖C M − C δ k<br />
M ‖ w < δ k and δ k → 0.<br />
Th<strong>en</strong> the sequ<strong>en</strong>ce {Q δ k<br />
αk<br />
} k≥1 where Q δ k<br />
αk<br />
is a solution of problem (2.27) with data C δ k<br />
M , prior<br />
P and regularization param<strong>et</strong>er α k chos<strong>en</strong> according to the discrepancy principle, has a weakly<br />
converg<strong>en</strong>t subsequ<strong>en</strong>ce. The limit of every such subsequ<strong>en</strong>ce of {Q δ k<br />
αk<br />
} k≥1 is a MELSS with<br />
data C M and prior P .<br />
Proof. Using the optimality of Q δk<br />
α k<br />
, we can write:<br />
ε δk (α k ) + α k I(Q δk<br />
α k<br />
|P ) ≤ ‖C Q+ − C δ k<br />
M ‖2 w + α k I(Q + |P ) ≤ δ 2 k + α kI(Q + |P ).<br />
The discrepancy principle (3.13) th<strong>en</strong> implies that<br />
I(Q δk<br />
α k<br />
|P ) ≤ I(Q + |P ), (3.15)<br />
By Lemma 2.10, the sequ<strong>en</strong>ce {Q δ k<br />
αk<br />
} k≥1 is tight and therefore, by Prohorov’s theorem and<br />
Lemma 2.4, relatively weakly compact in M ∩ L + B .<br />
Choose a subsequ<strong>en</strong>ce of {Q δ k<br />
αk<br />
} k≥1 , converging weakly to a limit Q and <strong>de</strong>noted, to simplify<br />
notation, again by {Q δ k<br />
αk<br />
} k≥1 . Inequality (3.13) and the triangle inequality yield:<br />
‖C Qδ k αk<br />
− C M ‖ w ≤ ‖C Qδ k αk<br />
− C δ k<br />
M ‖ w + δ k ≤ δ k (1 + √ c 2 ) −−−→<br />
k→∞ 0.<br />
By Lemma 2.2 this means that ‖C Q − C M ‖ w = 0 and therefore Q is a solution. By weak lower<br />
semicontinuity of I (cf. Corollary 2.1) and using (3.15),<br />
I(Q|P ) ≤ lim inf<br />
k<br />
which means that Q is a MELSS.<br />
I(Q δ k<br />
αk<br />
|P ) ≤ lim sup<br />
k<br />
I(Q δ k<br />
αk<br />
|P ) ≤ I(Q + |P ),<br />
The discrepancy principle performs well for regularizing linear operators but may fail in<br />
nonlinear problems like (2.27), because Equation (3.13) may have no solution due to discontinuity<br />
of the discrepancy function ε δ (α). Examples of nonlinear ill-posed problems to which the
106 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
discrepancy principle cannot be applied are giv<strong>en</strong> in [95] and [50]. However, in our numerical<br />
tests (see Section 3.6) we have always be<strong>en</strong> able to find a solution to (3.13)<br />
We will now give a simple suffici<strong>en</strong>t condition, adapted from [94], un<strong>de</strong>r which (3.13) admits<br />
a solution.<br />
Proposition 3.4. Suppose that the hypotheses 1–3 of page 103 are satisfied and l<strong>et</strong> c 1 and c 2<br />
satisfy (3.12). If ε δ (α) is a single-valued function th<strong>en</strong> there exists an α satisfying (3.13).<br />
This proposition is a direct consequ<strong>en</strong>ce of the following lemma.<br />
Lemma 3.5. The function ε δ (α) is non-<strong>de</strong>creasing and satisfies the following limit relations:<br />
lim ε δ (α) ≤ δ 2 ,<br />
α↓0<br />
lim ε δ(α) = ‖C Q∗ − C δ<br />
α→∞<br />
M‖ 2 w.<br />
If, at some point α > 0, ε δ (α) is single-valued, th<strong>en</strong> it is continuous at this point.<br />
The function<br />
J δ (α) := ‖C Qδ α<br />
− CM‖ δ 2 w + αI(Q δ α|P ).<br />
is non-<strong>de</strong>creasing, continuous, and satisfies the following limit relations:<br />
lim J δ (α) ≤ δ 2 ,<br />
α↓0<br />
lim J δ(α) ≥ ‖C Q∗ − C δ<br />
α→∞<br />
M‖ 2 w.<br />
Proof. L<strong>et</strong> γ δ (α) := I(Q δ α|P ) and l<strong>et</strong> 0 < α 1 < α 2 . By the optimality of Q δ α 1<br />
and Q δ α 2<br />
we have:<br />
and therefore<br />
ε δ (α 1 ) + α 1 γ δ (α 1 ) ≤ ε δ (α 2 ) + α 1 γ δ (α 2 ),<br />
ε δ (α 2 ) + α 2 γ δ (α 2 ) ≤ ε δ (α 1 ) + α 2 γ δ (α 1 )<br />
ε δ (α 2 ) − ε δ (α 1 ) ≥ α 1 (γ δ (α 1 ) − γ δ (α 2 ))<br />
ε δ (α 2 ) − ε δ (α 1 ) ≤ α 2 (γ δ (α 1 ) − γ δ (α 2 )),<br />
which implies that ε δ (α 2 ) ≥ ε δ (α 1 ) and γ δ (α 1 ) ≥ γ δ (α 2 ). To prove the first limit relation for<br />
ε δ (α), observe that for all α > 0,<br />
ε δ (α) ≤ ‖C Q+ − C δ M‖ 2 w + αI(Q + |P ) ≤ δ 2 + αI(Q + |P ) −−−→<br />
α→0 δ2 .<br />
To prove the second limit relation for ε δ (α), one can write, using the optimality of Q δ α:<br />
ε δ (α) + αγ δ (α) ≤ ‖C Q∗ − C δ M‖ 2 w + αI(Q ∗ |P ).
3.3. CHOICE OF THE REGULARIZATION PARAMETER 107<br />
From [30, Theorem 2.2],<br />
γ δ (α) ≥ I(Q δ α|Q ∗ ) + I(Q ∗ |P ). (3.16)<br />
Therefore<br />
Using the inequality<br />
I(Q δ α|Q ∗ ) ≤ ‖CQ∗ − C δ M ‖2 w<br />
α<br />
−−−→<br />
α→∞ 0.<br />
|P − Q| ≤ √ 2I(P |Q), (3.17)<br />
where |P − Q| <strong>de</strong>notes the total variation distance (see [30, Equation (2.3)]), this implies that<br />
Q δ α converges to Q ∗ in total variation distance (and therefore also weakly) as α goes to infinity.<br />
The limit relation now follows from Lemma 2.2.<br />
To prove the continuity of ε δ (α), l<strong>et</strong> {α n } be a sequ<strong>en</strong>ce of positive numbers, converging to<br />
α > 0. By the optimality of Q δ α n<br />
, I(Q δ α n<br />
|P ) is boun<strong>de</strong>d and one can choose a subsequ<strong>en</strong>ce of<br />
{Q δ α n<br />
}, converging weakly toward some measure Q ′ , and <strong>de</strong>noted, to simplify notation, again<br />
by {Q δ α n<br />
} n≥1 . We now need to prove that Q ′ is the solution of the calibration problem with<br />
regularization param<strong>et</strong>er α. By weak continuity of the pricing error (Lemma 2.2) and weak<br />
lower semicontinuity of the relative <strong>en</strong>tropy (Lemma 2.11), we have for any other measure Q:<br />
‖C Q′ − C δ M‖ 2 w + αI(Q ′ |P ) ≤ lim inf<br />
n {‖CQδ αn − C<br />
δ<br />
M ‖ 2 w + αI(Q δ α n<br />
|P )}<br />
= lim inf<br />
n {‖CQδ αn − C<br />
δ<br />
M ‖ 2 w + α n I(Q δ α n<br />
|P ) + (α − α n )I(Q δ α n<br />
|P )}<br />
≤ lim inf<br />
n {‖CQ − C δ M‖ 2 w + α n I(Q|P ) + (α − α n )I(Q δ α n<br />
|P )}<br />
= ‖C Q − C δ M‖ 2 w + αI(Q|P ).<br />
Therefore, the sequ<strong>en</strong>ce {ε δ (α n )} converges to one of the possible values of ε δ (α). If this function<br />
is single-valued in α, this means that every subsequ<strong>en</strong>ce of the original sequ<strong>en</strong>ce {ε δ (α n )} has<br />
a further subsequ<strong>en</strong>ce that converges toward ε δ (α), and therefore, the original sequ<strong>en</strong>ce also<br />
converges toward ε δ (α).<br />
The fact that J δ (α) is non<strong>de</strong>creasing as a function of α is trivial. To show the continuity,<br />
observe that for 0 < α 1 < α 2 ,<br />
J δ (α 2 ) − J δ (α 1 ) ≤ ε δ (α 1 ) + α 2 γ δ (α 1 ) − ε δ (α 1 ) − α 1 γ δ (α 1 )<br />
= (α 2 − α 1 )γ δ (α 1 ) ≤ (α 2 − α 1 )I(Q + |P ).
108 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
The limit relations for J δ (α) follow from the relations for ε δ (α).<br />
We will now pres<strong>en</strong>t an alternative a posteriori param<strong>et</strong>er choice rule, which reduces to the<br />
discrepancy principle wh<strong>en</strong> inequality (3.13) has a solution but also works wh<strong>en</strong> this is not<br />
the case. However, if the param<strong>et</strong>er is chos<strong>en</strong> according to the alternative rule, the sequ<strong>en</strong>ce<br />
of regularized solutions does not necessarily converge to a minimum <strong>en</strong>tropy solution as in<br />
Proposition 3.3 but to a solution with boun<strong>de</strong>d <strong>en</strong>tropy (see Proposition 3.7). Our treatm<strong>en</strong>t<br />
partly follows [50] where this param<strong>et</strong>er choice rule is applied to Tikhonov regularization.<br />
Alternative principle<br />
For a giv<strong>en</strong> noise level δ, if there exists α > 0 that satisfies<br />
c 1 δ 2 ≤ ε δ (α) ≤ c 2 δ 2 , (3.18)<br />
choose one such α; otherwise, choose an α > 0 that satisfies<br />
ε δ (α) ≤ c 1 δ 2 , J δ (α) ≥ c 2 δ 2 . (3.19)<br />
Proposition 3.6. Suppose that the hypotheses 1–3 of page 103 are satisfied and l<strong>et</strong> c 1 and c 2<br />
be as in (3.12). Th<strong>en</strong> there exists α > 0 satisfying either (3.18) or (3.19).<br />
Proof. Suppose that (3.18) does not admit a solution. We need to prove that there exists α > 0<br />
satisfying (3.19). L<strong>et</strong><br />
B := {α > 0 : ε δ (α) ≤ c 1 δ 2 } and U := {α > 0 : ε δ (α) > c 2 δ 2 }.<br />
The limit relations of Lemma 3.5 imply that both s<strong>et</strong>s are nonempty. Moreover, since we have<br />
assumed that (3.18) does not admit a solution, necessarily sup B = inf U. L<strong>et</strong> α ∗ := sup B ≡<br />
inf U. Now we need to show that<br />
By continuity of J δ (α),<br />
J δ (α ∗ ) > c 2 δ 2 . (3.20)<br />
J δ (α ∗ ) ≥ c 2 δ 2 + lim<br />
α↓α ∗ γ δ(α).<br />
If lim α↓α ∗ γ δ (α) > 0 th<strong>en</strong> (3.20) holds. Otherwise from (3.16), P is the minimal <strong>en</strong>tropy martingale<br />
measure and (3.17) implies that Q δ α ⇒ P as α ↓ α ∗ . Therefore, J δ (α ∗ ) = lim α↓α ∗ ε δ (α) =<br />
‖C Q∗ − C δ M ‖2 w > c 2 δ 2 and (3.20) is also satisfied.
3.3. CHOICE OF THE REGULARIZATION PARAMETER 109<br />
By continuity of J δ (α), there exists ∆ > 0 such that J δ (α ∗ − ∆) > c 2 δ 2 . However, since<br />
α ∗ = sup B and ε δ (α) is non<strong>de</strong>creasing, necessarily ε δ (α ∗ − ∆) ≤ c 1 δ 2 . Therefore, α − ∆ is a<br />
solution of (3.19).<br />
Remark 3.2. If c 1 < c 2 , one can show, along the lines of the above proof, that there exists not<br />
a single α that satisfies either (3.18) or (3.19) but an interval of nonzero l<strong>en</strong>gth (α 1 , α 2 ), such<br />
that each point insi<strong>de</strong> this interval satisfies one of the two conditions. From the computational<br />
viewpoint this means that a feasible α can be found by bisection with a finite number of<br />
iterations.<br />
Proposition 3.7. Suppose that the hypotheses 1–3 of page 103 are satisfied and that c 1 and c 2<br />
are chos<strong>en</strong> according to (3.12). L<strong>et</strong> {C δ k<br />
M } k≥1 be a sequ<strong>en</strong>ce of data s<strong>et</strong>s such that ‖C M −C δ k<br />
M ‖ w <<br />
δ k and δ k → 0.<br />
Th<strong>en</strong> the sequ<strong>en</strong>ce {Q δ k<br />
αk<br />
} k≥1 where Q δ k<br />
αk<br />
is a solution of problem (2.27) with data C δ k<br />
M , prior<br />
P and regularization param<strong>et</strong>er α k chos<strong>en</strong> according to the alternative principle, has a weakly<br />
converg<strong>en</strong>t subsequ<strong>en</strong>ce. The limit Q ′ of every such subsequ<strong>en</strong>ce of {Q δ k<br />
αk<br />
} k≥1 satisfies<br />
‖C Q′ − C M ‖ w = 0<br />
I(Q ′ |P ) ≤ c 2<br />
c 2 − 1 I(Q+ |P ).<br />
Proof. Using the optimality of Q δk<br />
α k<br />
, we can write:<br />
ε δk (α k ) + α k I(Q δk<br />
α k<br />
|P ) ≤ ‖C Q+ − C δ k<br />
M ‖2 w + α k I(Q + |P ) ≤ δ 2 + α k I(Q + |P ). (3.21)<br />
If α k satisfies (3.18), the above implies that<br />
otherwise (3.19) <strong>en</strong>tails that<br />
and tog<strong>et</strong>her with (3.21) this gives<br />
I(Q δk<br />
α k<br />
|P ) ≤ I(Q + |P ),<br />
ε δk (α k ) + α k I(Q δk<br />
α k<br />
|P ) ≥ c 2 δ 2 ,<br />
I(Q δk<br />
α k<br />
|P ) ≤ c 2<br />
c 2 − 1 I(Q+ |P ).<br />
In both cases I(Q δk<br />
α k<br />
|P ) is uniformly boun<strong>de</strong>d, which means, by Lemma 2.10, that the sequ<strong>en</strong>ce<br />
{Q δ k<br />
αk<br />
} k≥1 is tight and therefore, by Prohorov’s theorem, relatively weakly compact. The rest<br />
of the proof follows the lines of the proof of Proposition 3.3.
110 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
3.3.2 A posteriori param<strong>et</strong>er choice rule for non-attainable calibration problems<br />
In this subsection we suppose that hypothesis 1 of page 103 is satisfied and that hypotheses 2<br />
and 3 are replaced with the following ones:<br />
2a. There exists a solution Q + of problem (2.11) with data C M such that<br />
I(Q + |P ) < ∞<br />
and<br />
‖C Q+ − C M ‖ w > 0<br />
(the data is not attainable by an exp-Lévy mo<strong>de</strong>l).<br />
3a. There exists δ 0 such that<br />
Giv<strong>en</strong> two constants c 1 and c 2 satisfying<br />
ε max := inf<br />
δ≤δ 0<br />
{‖C Q∗ − C δ M‖ 2 w − ‖C Q+ − C δ M‖ 2 w} > 0.<br />
the discrepancy principle can be stated as follows:<br />
0 < c 1 ≤ c 2 < εmax<br />
δ0<br />
2 , (3.22)<br />
Discrepancy principle for non-attainable data For a giv<strong>en</strong> noise level δ, choose α > 0<br />
that satisfies<br />
c 1 δ 2 ≤ ε δ (α) − ε δ (0) ≤ c 2 δ 2 , (3.23)<br />
Proofs of the following two results are similar to the proofs of Propositions 3.4 and 3.3 of<br />
the preceding subsection and are therefore omitted.<br />
Proposition 3.8. Suppose that hypothesis 1 of page 103 and hypotheses 2a and 3a of page 110<br />
are satisfied and l<strong>et</strong> c 1 and c 2 satisfy (3.22). If ε δ (α) is a single-valued function th<strong>en</strong> there exists<br />
an α satisfying (3.23).<br />
Proposition 3.9. Suppose that hypothesis 1 of page 103 and hypotheses 2a and 3a of page 110<br />
are satisfied and l<strong>et</strong> c 1 and c 2 satisfy (3.22) for all δ. L<strong>et</strong> {C δ k<br />
M } k≥1 be a sequ<strong>en</strong>ce of data s<strong>et</strong>s<br />
such that ‖C M − C δ k<br />
M ‖ w ≤ δ k and δ k → 0.
3.4. CHOICE OF THE WEIGHTS 111<br />
Th<strong>en</strong> the sequ<strong>en</strong>ce {Q δ k<br />
αk<br />
} k≥1 where Q δ k<br />
αk<br />
is a solution of problem (2.27) with data C δ k<br />
M , prior<br />
P and regularization param<strong>et</strong>er α k chos<strong>en</strong> according to the discrepancy principle, has a weakly<br />
converg<strong>en</strong>t subsequ<strong>en</strong>ce. The limit of every such subsequ<strong>en</strong>ce of {Q δ k<br />
αk<br />
} k≥1 is a MELSS with<br />
data C M and prior P .<br />
The alternative principle of the preceding section does not carry over to non-attainable<br />
problems as easily and is not discussed here.<br />
3.3.3 Computing the noise level<br />
If the bid and ask prices are known, the noise level δ and an estimate of option prices C δ M can<br />
be computed directly using<br />
CM(T, δ K) := Cbid M (T, K) + Cask (T, K)<br />
, ∀ T, K,<br />
2<br />
δ := ‖Cbid M<br />
− Cask M<br />
Since for all i, the true option prices satisfy C M (T i , K i ) ∈ (C bid<br />
C M ‖ w ≤ δ.<br />
2<br />
‖ w<br />
.<br />
M , Cask M<br />
), we clearly have ‖Cδ M −<br />
If the bid and ask prices are unavailable, one can assess the or<strong>de</strong>r of magnitu<strong>de</strong> of δ directly<br />
from C δ M , using the following heuristic argum<strong>en</strong>t. Suppose that the exact data C M is attainable<br />
and that the errors in differ<strong>en</strong>t option prices are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt. Th<strong>en</strong> it is reasonable to assume<br />
that the main part of error, pres<strong>en</strong>t in C δ M<br />
will lead to violations of arbitrage constraints on<br />
option prices (e.g. convexity). Since the least squares solution Q + is an arbitrage-free mo<strong>de</strong>l,<br />
these violations of no-arbitrage constraints will contribute to the discrepancy ‖C Q+ − C δ M ‖2 w ≡<br />
ε δ (0), as shown in Figure 3.3. Therefore, ε δ (0) will have the same or<strong>de</strong>r of magnitu<strong>de</strong> as δ 2<br />
and one can approximately take δ ∼ √ ε δ (0). Since the noise level δ is only used to choose<br />
the regularization param<strong>et</strong>er α, we do not need to know it with high precision and this rough<br />
estimate is suffici<strong>en</strong>t.<br />
3.4 Choice of the weights of option prices<br />
The relative weights w i of option prices in the pricing error term (2.3) should reflect our confi<strong>de</strong>nce<br />
in individual data points, which is <strong>de</strong>termined by the liquidity of a giv<strong>en</strong> option. This
112 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
C<br />
Least squares calibration<br />
Noisy mark<strong>et</strong> data<br />
K<br />
Figure 3.3: Estimating the noise level in the data.<br />
can be assessed from the bid-ask spreads by choosing<br />
w i :=<br />
w<br />
(CM bid(T<br />
i, K i ) − CM ask(T<br />
i, K i )) 2 ,<br />
where w is the normalization constant, <strong>de</strong>termined from ∑ i w i = 1. However, the bid and<br />
ask quotes are not always available from option price data bases. On the other hand, it is<br />
known that at least for the options that are not too far from the money, the bid-ask spread<br />
in implied volatility units is of or<strong>de</strong>r of 1%. This means that to have errors proportional to<br />
bid-ask spreads, one must minimize the differ<strong>en</strong>ces of implied volatilities and not those of the<br />
option prices. However, this would prohibitively increase the computational bur<strong>de</strong>n since one<br />
would have to invert numerically the Black-Scholes formula once for each data point at each<br />
minimization step. each A feasible solution is to minimize the squared differ<strong>en</strong>ces of option<br />
prices weighted by the Black Scholes “vegas” evaluated at the points corresponding to mark<strong>et</strong><br />
option prices. D<strong>en</strong>oting the implied volatility computed in the mo<strong>de</strong>l Q for strike K and<br />
maturity T by Σ Q (T, K) and the corresponding mark<strong>et</strong> implied volatility by Σ M (T, K), we
3.5. NUMERICAL SOLUTION 113<br />
have the following approximation:<br />
N∑<br />
(Σ Q (T i , K i ) − Σ M (T i , K i )) 2<br />
i=1<br />
≈<br />
=<br />
N∑<br />
i=1<br />
( ) ∂Σ<br />
2<br />
∂C (C M(T i , K i ))|C Q (T i , K i ) − C M (T i , K i )|<br />
N∑ (C Q (T i , K i ) − C M (T i , K i )) 2<br />
Vega 2 , (3.24)<br />
(Σ M (T i , K i ))<br />
i=1<br />
where Vega <strong>de</strong>notes the <strong>de</strong>rivative of the Black-Scholes option price with respect to volatility:<br />
Vega(σ) = S √ ( ( )<br />
1 S<br />
T n<br />
σ √ T log Ke −rT + 1 )<br />
2 σ√ T ,<br />
with n <strong>de</strong>noting the CDF of the standard normal distribution. Therefore, by using w i =<br />
w<br />
Vega 2 i<br />
one can achieve the correct weighting of option prices without increasing the computational<br />
bur<strong>de</strong>n 1 (because w i can be computed in advance.)<br />
3.5 Numerical solution of calibration problem<br />
Once the (discr<strong>et</strong>e) prior P = P (A, ν P , γ P ), the regularization param<strong>et</strong>er α and the weights w i<br />
have be<strong>en</strong> fixed, it remains to find the numerical solution of the calibration problem (2.27).<br />
We construct an approximate solution of the calibration problem (2.27) by minimizing an<br />
approximation of the calibration functional J α (Q), <strong>de</strong>noted by<br />
Ĵ α (Q) := ‖C M − ĈQ ‖ 2 w + αI(Q|P ), (3.25)<br />
where ĈQ is the approximate option price <strong>de</strong>fined by Equation (3.31) below. The minimization<br />
is done over all Lévy processes Q ∈ M ∩ L + B<br />
with Lévy measures of the form (3.2). The<br />
calibration functional therefore becomes a function of a finite number of argum<strong>en</strong>ts:<br />
Ĵ α (Q) = Ĵα(q 0 , . . . , q M−1 ), (3.26)<br />
To minimize (3.26) we use a variant of the popular Broy<strong>de</strong>n-Fl<strong>et</strong>cher-Goldfarb-Shanno (BFGS)<br />
variable m<strong>et</strong>ric algorithm. For a <strong>de</strong>scription of the algorithm see [80]. This algorithm requires<br />
1 Since vegas can be very small for out of the money options, to avoid giving them too much weight one should<br />
impose a lower bound on the vegas used for weighting, i.e., use weights of the form w i =<br />
constant C ∼ 10 −2 ÷ 10 −1 .<br />
w<br />
(Vega i ∧C) 2<br />
with some
114 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
the user to supply the function value and its gradi<strong>en</strong>t and tries, iteratively, to build up a good<br />
approximation of the inverse Hessian matrix of the functional being optimized. In our numerical<br />
examples we used the LBFGS implem<strong>en</strong>tation by Jorge Nocedal <strong>et</strong> al. [20]. The algorithm is<br />
typically initialized with the prior Lévy measure.<br />
Since gradi<strong>en</strong>t-based m<strong>et</strong>hods only allow to find one local minimum of the objective function<br />
and the calibration functional (3.26) is not convex, there is no guarantee that the BFGS algorithm<br />
will converge to its true global minimum. However, starting the optimization procedure<br />
from differ<strong>en</strong>t initializers, we have empirically observed (see Section 3.6.1) that in pres<strong>en</strong>ce of<br />
ev<strong>en</strong> a small regularization, the minimizers do not <strong>de</strong>p<strong>en</strong>d on the starting point of the minimization<br />
algorithm and that using a gradi<strong>en</strong>t-based optimization procedure produces an acceptable<br />
calibration quality.<br />
In the rest of this section we show how to compute numerically the functional (3.26) and<br />
its gradi<strong>en</strong>t. For simplicity, from now on we will suppose that the prior Lévy process has a<br />
non-zero diffusion part (A > 0).<br />
3.5.1 Computing the calibration functional<br />
Substituting the discr<strong>et</strong>e expressions (3.1) and (3.2) into formula (3.25), we obtain:<br />
Ĵ α (Q) =<br />
N∑<br />
w i (ĈQ (T i , K i ) − C M (T i , K i )) 2<br />
i=1<br />
⎛<br />
⎞<br />
+ α ⎝ A M−1<br />
2A 2 + ∑<br />
bP + (e x j<br />
− 1)q j<br />
⎠<br />
j=0<br />
2<br />
M−1<br />
∑<br />
+ α (q j log(q j /p j ) + 1 − q j ) , (3.27)<br />
j=0<br />
where b P = γ P − ∫ |x|≤1 xνP (dx) is the drift of the prior process. The last two terms of the<br />
above equation can be evaluated directly using a finite number of computer operations, we will<br />
therefore conc<strong>en</strong>trate on the first term.<br />
The approximate option prices ĈQ (T i , K i ) are computed using the Fourier transform algorithm<br />
of Section 1.4 as follows: for each maturity date, pres<strong>en</strong>t in the data, prices are first<br />
computed on a fixed grid of strikes and th<strong>en</strong> interpolated to obtain prices at strikes K i corresponding<br />
to this maturity date. The number of Fourier transforms is thus <strong>de</strong>termined by the<br />
number of maturity dates pres<strong>en</strong>t in the data, which is typically smaller than 10.<br />
To use the Fourier transform m<strong>et</strong>hod, the first step is to compute the characteristic expon<strong>en</strong>t
3.5. NUMERICAL SOLUTION 115<br />
of X t un<strong>de</strong>r Q at the points u − i for real u:<br />
ψ Q (u − i) = − A M−1<br />
2 u(u − i) − (1 + iu) ∑<br />
Introducing uniform grids<br />
j=0<br />
M−1<br />
∑<br />
(e x j<br />
− 1)q j −<br />
j=0<br />
M−1<br />
∑<br />
q j +<br />
j=0<br />
e iux j<br />
e x j<br />
q j .<br />
x j = x 0 + jd and u k = u 0 − k∆,<br />
the last term becomes:<br />
M−1<br />
∑<br />
j=0<br />
e iu kx j<br />
e x j<br />
q j = e −ik∆x 0<br />
M−1<br />
∑<br />
j=0<br />
e −ikjd∆ e (iu 0+1)x j<br />
q j<br />
and comparing this to Equation (1.27), we see that if d∆ = 2π M , the last term of {ψQ (u k −i)} M−1<br />
k=0<br />
becomes a discr<strong>et</strong>e Fourier transform (cf. Equation (1.27)):<br />
ψ k := ψ Q (u k − i) = − A M−1<br />
2 u ∑<br />
k(u k − i) − (1 + iu k )<br />
j=0<br />
(e x j<br />
− 1)q j −<br />
M−1<br />
∑<br />
j=0<br />
q j<br />
+ e −ik∆x 0<br />
DFT k [e (iu 0+1)x j<br />
q j ]. (3.28)<br />
This expression can therefore be computed using the fast Fourier transform algorithm. Note<br />
that at this stage all computations are exact: there are no truncation or discr<strong>et</strong>ization errors.<br />
For a giv<strong>en</strong> maturity date T we now need to compute the Fourier transform ˜ζ T<br />
modified time value of options (see Equation (1.25)) at the points {u k } M−1<br />
k=0 :<br />
of the<br />
˜ζ T (u k ) = e iu krT eT ψ k<br />
− e − AT<br />
2 (u k(u k −i))<br />
iu k (1 + iu k )<br />
. (3.29)<br />
Option time values are th<strong>en</strong> approximated using Equation (1.28) on the same grid of log-strikes<br />
{x j } M−1<br />
j=0<br />
that was used to discr<strong>et</strong>ize the Lévy measure. 2 In the following equation and below<br />
we <strong>de</strong>note approximated quantities by putting a hat over the corresponding variables.<br />
ˆ˜z T (x j ) = ∆ M−1<br />
∑<br />
2π e−ix ju M−1<br />
k=0<br />
w k ˜ζT (u M−1−k )e −ix 0∆k e −2πijk/M<br />
= ∆ 2π e−ix ju M−1<br />
DFT j [w k ˜ζT (u M−1−k )e −ix 0∆k ], (3.30)<br />
2 Actually, the grid of log-strikes may be shifted but we do not do this here to simplify the formulas.
116 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
where w k are the weights corresponding to the chos<strong>en</strong> integration rule. For a giv<strong>en</strong> strike K<br />
such that x 0 ≤ log K ≤ x M−1 , the option price can now be computed by linear interpolation<br />
(other interpolation m<strong>et</strong>hods can also be used):<br />
Ĉ Q √<br />
(T, K) = C A<br />
BS (T, K) + log K − x n K ˆ˜z T (x nK +1) + x n K +1 − log K<br />
ˆ˜z T (x nK ), (3.31)<br />
x nK +1 − x nK x nK +1 − x nK<br />
√<br />
where n K := sup{n : x n ≤ log K} and C A<br />
BS<br />
(T, K) <strong>de</strong>notes the Black Scholes price of a call<br />
option with time to maturity T , strike K and volatility √ A.<br />
Error control The above m<strong>et</strong>hod of evaluating option prices contains three types of numerical<br />
errors: truncation and discr<strong>et</strong>ization errors appear wh<strong>en</strong> the integral is replaced by a finite sum<br />
using Equation (1.28), and interpolation error appears in Equation (3.31). Supposing that the<br />
grid in Fourier space is c<strong>en</strong>tered, that is, u 0 = L/2 and ∆ = L/(M − 1) for some constant L,<br />
Section 1.4 allows to obtain the following bounds for the first two types of error.<br />
Since we have supposed that A > 0, Equation (1.30) provi<strong>de</strong>s a uniform (with respect to Q)<br />
bound for the truncation error:<br />
|ε T | ≤<br />
16e−T<br />
AL2<br />
πT AL 3 .<br />
Proposition 1.13 does not give uniform bounds for the discr<strong>et</strong>ization (sampling) error, however,<br />
since the calibrated Lévy measures are usually similar to the Lévy measures of the prior<br />
process (see Section 3.6), the or<strong>de</strong>r of magnitu<strong>de</strong> of the discr<strong>et</strong>ization error can be estimated<br />
by computing the bounds of Proposition 1.13 for the prior process. The exact form of the error<br />
<strong>de</strong>p<strong>en</strong>ds on the integration rule used; for example for Simpson’s rule one has<br />
( L 4 )<br />
log L<br />
|ε D | = O<br />
M 4 .<br />
A uniform bound for the interpolation error <strong>de</strong>p<strong>en</strong>ds on the interpolation m<strong>et</strong>hod that one<br />
is using. For linear interpolation using Equation (3.31) one easily obtains<br />
|ε I | ≤ d2<br />
8<br />
max ˜z′′ T ,<br />
and the second <strong>de</strong>rivative of the time value is uniformly boun<strong>de</strong>d un<strong>de</strong>r the hypothesis A > 0
3.5. NUMERICAL SOLUTION 117<br />
since<br />
∣<br />
∣˜z ′′<br />
T (k) ∣ ∣ = 1<br />
2π<br />
∣<br />
∫ ∞<br />
−∞<br />
v 2 e −ivk ˜ζT (v)dv<br />
∣<br />
≤ 1 ∫ ∞<br />
|Φ T (v − i)|dv + 1<br />
2π −∞<br />
2π<br />
∫ ∞<br />
−∞<br />
√<br />
√<br />
|Φ A<br />
2<br />
T (v − i)|dv ≤ πAT ,<br />
where we have used Equation (1.25) and Lemma 1.10. Combining the above two expressions,<br />
one obtains:<br />
|ε I | ≤ 1 L 2 √<br />
π 3<br />
2AT .<br />
Taking L and M suffici<strong>en</strong>tly large so that L/M becomes small, one can make the total error<br />
ε = ε T + ε D + ε I arbitrarily small. In practice, the param<strong>et</strong>ers M and L of the discr<strong>et</strong>ization<br />
scheme should be chos<strong>en</strong> such that the total numerical error is of the same or<strong>de</strong>r as the noise<br />
level in the data. The continuity result (Theorem 2.16) th<strong>en</strong> guarantees that the numerical<br />
approximation of the calibrated measure will be close to the true solution.<br />
3.5.2 Computing the gradi<strong>en</strong>t of the calibration functional<br />
We emphasize that for the optimization algorithm to work correctly, we must compute the exact<br />
gradi<strong>en</strong>t of the approximate functional (3.26), rather than an approximation of the gradi<strong>en</strong>t of<br />
the exact functional. The gradi<strong>en</strong>t of the approximate calibration functional is computed as<br />
follows:<br />
∂Ĵα(q 0 , . . . , q M−1 )<br />
∂q k<br />
=<br />
N∑<br />
w i (ĈQ (T i , K i ) − C M (T i , K i )) ∂ĈQ (T i , K i )<br />
∂q k<br />
⎛<br />
⎞<br />
+ α(ex k<br />
− 1)<br />
⎝ A M−1<br />
2A 2 + ∑<br />
bP + (e x j<br />
− 1)q j<br />
⎠ + α log(q k /p k ).<br />
i=1<br />
The nontrivial part is therefore to compute the gradi<strong>en</strong>t of the approximate option price<br />
Ĉ Q (T i , K i ) and for this, due to the linear structure of the interpolating formula (3.31) it suffices<br />
to know the gradi<strong>en</strong>t of ˆ˜z T at the points {x i }<br />
i=0 M−1 . From Equation (3.30),<br />
[<br />
∂ˆ˜z T (x j )<br />
= ∆ ∂q m 2π e−ix ju M−1<br />
∂<br />
DFT j w ˜ζ<br />
]<br />
T (u M−1−k )<br />
k e −ix 0∆k<br />
,<br />
∂q m<br />
j=0
118 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
and formulas (3.28–3.29) yield:<br />
where ψ A k<br />
∂ ˜ζ T (u k )<br />
∂q m<br />
= T eiu krT +T ψ k {<br />
e<br />
x m+iu k x m<br />
− 1 − (1 + iu k )(e xm − 1) }<br />
iu k (1 + iu k )<br />
= T (e xm − 1) eiu krT +T ψ k<br />
+ T e xm eiukrT (e T ψ k<br />
− e T ψA k )<br />
1 + iu k iu k (1 + iu k )<br />
− T e xm eiu krT (e T ψ k<br />
− e T ψA k )<br />
iu k (1 + iu k )<br />
e iu kx m<br />
+ T e xm eiu krT +T ψk A (e iu kx m<br />
− 1)<br />
,<br />
iu k (1 + iu k )<br />
= − A<br />
2 u k(u k − i). Suppose that the grid in strike space is such that x 0 = m 0 d for<br />
some m 0 ∈ Z. Th<strong>en</strong> for every j ∈ {0, . . . , M − 1},<br />
M−1<br />
∑<br />
DFT j [f k e iu M−1−kx m<br />
] = e iu M−1x m<br />
Introducing additional notation:<br />
k=0<br />
e −2πik(j−m−m 0)/M f k<br />
H k = eiu krT +ψ k T<br />
1 + iu k<br />
G k = eiu krT +ψ A k T<br />
iu k (1 + iu k ) ,<br />
we obtain the final formula for computing the gradi<strong>en</strong>t:<br />
∂ˆ˜z T (x j )<br />
∂q m<br />
= ∆ 2π e−ix ju M−1<br />
T (e xm − 1)DFT j<br />
[<br />
w k e −ix 0∆k H M−1−k<br />
]<br />
= e iu M−1x m<br />
DFT (j−m0 −m) mod M [f k ].<br />
+ T e xm (e iu M−1x m ˆ˜z T (x (j−m0 −m) mod M ) − ˆ˜z T (x j ))<br />
+ ∆ ]<br />
2π ei(xm−x j)u M−1<br />
T e xm DFT (j−m0 −m) mod M<br />
[w k e −ix0∆k G M−1−k<br />
− ∆ [<br />
]<br />
2π e−ix ju M−1<br />
T e xm DFT j w k e −ix0∆k G M−1−k . (3.32)<br />
The time values ˆ˜z T have already be<strong>en</strong> computed in all points of the grid wh<strong>en</strong> evaluating option<br />
prices, and the Fourier transforms of G k do not need to be reevaluated at each step of the<br />
algorithm because G k do not <strong>de</strong>p<strong>en</strong>d on q i . Therefore, compared to evaluating the functional<br />
alone, to compute the gradi<strong>en</strong>t of Ĵ α one only needs one additional fast Fourier transform per<br />
maturity date. The complexity of evaluating the gradi<strong>en</strong>t using the above formula is thus only<br />
about 1.5 times higher than that of evaluating the functional itself (because evaluating option<br />
prices requires two Fourier transforms per maturity date). If the gradi<strong>en</strong>t was to be evaluated<br />
numerically, the complexity would typically be M times higher. The analytic formula (3.32)<br />
therefore allows to reduce the overall running time of the calibration algorithm from several<br />
hours to less than a minute on a standard PC.
3.6. NUMERICAL AND EMPIRICAL TESTS 119<br />
3.5.3 Overview of the algorithm<br />
Here is the final numerical algorithm, as implem<strong>en</strong>ted in the computer program levycalibration,<br />
used to run the tests of Section 3.6.<br />
• Fix the prior using one of the m<strong>et</strong>hods <strong>de</strong>scribed in Section 3.2. In the tests below, a<br />
user-specified prior was tak<strong>en</strong>.<br />
• Compute the weights of mark<strong>et</strong> option prices (Section 3.4) and estimate the noise level<br />
(Section 3.3.3).<br />
• Use one of the a posteriori m<strong>et</strong>hods of Section 3.3.1 to compute an optimal regularization<br />
param<strong>et</strong>er α ∗ achieving tra<strong>de</strong>-off b<strong>et</strong>we<strong>en</strong> precision and stability. The optimal α ∗ is computed<br />
by bisection, minimizing ˜J α several times for differ<strong>en</strong>t values of α with low precision.<br />
In the tests below we have always be<strong>en</strong> able to choose α ∗ using the discrepancy principle<br />
(3.13) with c 1 = 1.1 and c 2 = 1.3, so there was no need to resort to the alternative scheme<br />
(3.19).<br />
• Minimize ˜J α ∗ with high precision to find the regularized solution Q ∗ .<br />
3.6 Numerical and empirical tests<br />
Our numerical tests, performed using the levycalibration program, fall into two categories.<br />
First, to assess the accuracy and numerical stability of our m<strong>et</strong>hod, we tested it on option prices<br />
produced by a known expon<strong>en</strong>tial-Lévy mo<strong>de</strong>l (Section 3.6.1). We th<strong>en</strong> applied our algorithm<br />
to real options data, using the prices of European options on differ<strong>en</strong>t European stock mark<strong>et</strong><br />
indices, provi<strong>de</strong>d by Thomson Financial R and studied the properties of Lévy measures, implied<br />
by mark<strong>et</strong> data.<br />
3.6.1 Tests on simulated data<br />
A compound Poisson example: Kou’s mo<strong>de</strong>l In the first series of tests, option prices<br />
were g<strong>en</strong>erated using Kou’s jump diffusion mo<strong>de</strong>l [62] with a diffusion part with volatility<br />
σ 0 = 10% and a Lévy <strong>de</strong>nsity giv<strong>en</strong> by Equation (1.17).
120 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
0.5<br />
0.45<br />
simulated<br />
calibrated<br />
0.5<br />
0.45<br />
simulated<br />
calibrated<br />
0.4<br />
0.4<br />
0.35<br />
0.35<br />
0.3<br />
0.3<br />
0.25<br />
0.25<br />
0.2<br />
0.2<br />
0.15<br />
0.15<br />
0.1<br />
6 7 8 9 10 11 12 13 14<br />
0.1<br />
6 7 8 9 10 11 12 13 14<br />
Figure 3.4: Calibration quality (implied volatilities as a function of strike prices) for Kou’s jump<br />
diffusion mo<strong>de</strong>l. Left: no perturbations. Right: 1% perturbations were ad<strong>de</strong>d to the data<br />
The Lévy <strong>de</strong>nsity used in the tests was asymm<strong>et</strong>ric with the left tail heavier than the<br />
right one (α 1 = 1/0.07 and α 2 = 1/0.13). The jump int<strong>en</strong>sity λ was equal to 1 and the last<br />
param<strong>et</strong>er p was chos<strong>en</strong> such that the Lévy <strong>de</strong>nsity is continuous at x = 0. The option prices<br />
were computed using the Fourier transform m<strong>et</strong>hod of Section 1.4. The maturity of the options<br />
was 5 weeks and we used 21 equidistant strikes ranging from 6 to 14 (the spot being at 10). To<br />
capture tail behavior it is important to have strikes quite far in and out of the money. Merton’s<br />
jump diffusion mo<strong>de</strong>l [71] was used as prior.<br />
After g<strong>en</strong>erating s<strong>et</strong>s of call option prices from Kou’s mo<strong>de</strong>l, in the first test, the algorithm<br />
<strong>de</strong>scribed in Section 3.5.3 was applied to these prices directly, and in the second test, to mo<strong>de</strong>l<br />
the pres<strong>en</strong>ce of data errors, random perturbations of or<strong>de</strong>r of 1% of implied volatility were<br />
ad<strong>de</strong>d to the simulated prices. As can be observed from Figure 3.4, in both cases the accuracy<br />
of calibration at the level of implied volatilities is satisfying with only 21 options.<br />
Figure 3.5 compares the non-param<strong>et</strong>ric reconstruction of the Lévy <strong>de</strong>nsity to the true Lévy<br />
<strong>de</strong>nsity which, in this case, is known to be of the form (1.17). It can be observed that ev<strong>en</strong> in<br />
pres<strong>en</strong>ce of data errors we r<strong>et</strong>rieve successfully the main features of the true <strong>de</strong>nsity with our<br />
non-param<strong>et</strong>ric approach. The only region in which we observe a <strong>de</strong>tectable error is near zero:<br />
very small jumps have a small impact on option prices. The gradi<strong>en</strong>t of option’s time value<br />
giv<strong>en</strong> by Equation (3.32) vanishes at zero (i.e. for m = m 0 ) which means that the Lévy <strong>de</strong>nsity
3.6. NUMERICAL AND EMPIRICAL TESTS 121<br />
5<br />
4.5<br />
4<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
Prior<br />
True<br />
Calibrated<br />
10 1 Prior<br />
True<br />
10 0<br />
Calibrated<br />
10 −1<br />
10 −2<br />
10 −3<br />
10 −4<br />
0<br />
−0.6 −0.4 −0.2 0 0.2 0.4 0.6<br />
5<br />
4.5<br />
4<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
Prior<br />
True<br />
Calibrated<br />
0<br />
−0.6 −0.4 −0.2 0 0.2 0.4 0.6<br />
10 −5<br />
−0.6 −0.4 −0.2 0 0.2 0.4 0.6<br />
10 1 Prior<br />
True<br />
10 0<br />
Calibrated<br />
10 −1<br />
10 −2<br />
10 −3<br />
10 −4<br />
10 −5<br />
−0.6 −0.4 −0.2 0 0.2 0.4 0.6<br />
Figure 3.5: Lévy measure calibrated to option prices simulated from Kou’s jump diffusion mo<strong>de</strong>l<br />
with σ 0 = 10%, on linear and logarithmic scale. Top: No perturbations were ad<strong>de</strong>d. Bottom:<br />
1% perturbations were ad<strong>de</strong>d to the data.<br />
at or near zero is <strong>de</strong>termined exclusively by the prior: the int<strong>en</strong>sity of small jumps cannot be<br />
r<strong>et</strong>rieved accurately.<br />
Figure 3.6 illustrates the redundancy of small jumps and diffusion: the two graphs were<br />
calibrated to the same prices and only differ in the diffusion coeffici<strong>en</strong>ts. Comparing the two<br />
graphs shows that the algorithm comp<strong>en</strong>sates the error in the diffusion coeffici<strong>en</strong>t by adding<br />
jumps to the Lévy <strong>de</strong>nsity so that, overall, the accuracy of calibration is maintained (the<br />
standard <strong>de</strong>viation in both graphs is 0.2%). The redundancy of small jumps and diffusion<br />
compon<strong>en</strong>t has be<strong>en</strong> pointed out by other authors in the context of statistical estimation on time<br />
series [15, 69]. Here we r<strong>et</strong>rieve another version of this redundancy in a context of calibration<br />
to a cross sectional data s<strong>et</strong> of options.
122 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
5<br />
4.5<br />
prior<br />
true<br />
calibrated<br />
5<br />
4.5<br />
prior<br />
true<br />
calibrated<br />
4<br />
4<br />
3.5<br />
3.5<br />
3<br />
3<br />
2.5<br />
2.5<br />
2<br />
2<br />
1.5<br />
1.5<br />
1<br />
1<br />
0.5<br />
0.5<br />
0<br />
−0.5 0 0.5<br />
0<br />
−0.5 0 0.5<br />
Figure 3.6: Lévy measure calibrated to option prices simulated from Kou’s jump diffusion mo<strong>de</strong>l<br />
with σ 0 = 10%. Left: σ = 10.5% > σ 0 . Right: σ = 9.5% < σ 0 .<br />
The stability of the algorithm with respect to initial conditions can be tested by altering<br />
the starting point of the optimization routine and examining the effect on the output. As<br />
illustrated in Figure 3.7, the <strong>en</strong>tropy p<strong>en</strong>alty removes the s<strong>en</strong>sitivity observed in the non-linear<br />
least squares algorithm (see Figure 2.2 and Section 2.1). The only minor differ<strong>en</strong>ce b<strong>et</strong>we<strong>en</strong><br />
the two calibrated measures is observed in the neighborhood of zero i.e. the region which, as<br />
remarked above, has little influ<strong>en</strong>ce on option prices.<br />
Variance gamma mo<strong>de</strong>l In a second series of tests we examine how our m<strong>et</strong>hod performs<br />
wh<strong>en</strong> applied to option prices g<strong>en</strong>erated by an infinite int<strong>en</strong>sity process such as the variance<br />
gamma mo<strong>de</strong>l. We assume that the user, ignoring that the data g<strong>en</strong>erating process has infinite<br />
jump int<strong>en</strong>sity, chooses a (misspecified) prior which has a finite jump int<strong>en</strong>sity (e.g. the Merton<br />
mo<strong>de</strong>l).<br />
We g<strong>en</strong>erated option prices for 21 equidistant strikes b<strong>et</strong>we<strong>en</strong> 0.6 and 1.4 (the spot being at<br />
1) using the variance gamma mo<strong>de</strong>l [67] with no diffusion compon<strong>en</strong>t and applied the calibration<br />
algorithm using a Merton jump diffusion mo<strong>de</strong>l as prior to these prices. The param<strong>et</strong>ers of the<br />
variance gamma process (cf Equation (1.18)) were σ = 0.3, θ = −0.2 and k = 0.04. All the<br />
options were maturing in five weeks. The left graph in Figure 3.8 shows that ev<strong>en</strong> though the<br />
prior is misspecified, the calibrated mo<strong>de</strong>l reproduced the simulated implied volatilities with
3.6. NUMERICAL AND EMPIRICAL TESTS 123<br />
5<br />
4.5<br />
4<br />
true<br />
calibrated with λ 0<br />
=2<br />
calibrated with λ 0<br />
=1<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5 0 0.5<br />
Figure 3.7: Levy <strong>de</strong>nsities calibrated to option prices g<strong>en</strong>erated from Kou mo<strong>de</strong>l, using two<br />
differ<strong>en</strong>t initial measures with int<strong>en</strong>sities λ = 1 and λ = 2.<br />
good precision (for both values of σ 0 that we took, the standard <strong>de</strong>viation is less than 0.5% in<br />
implied volatility units).<br />
The calibrated Lévy <strong>de</strong>nsities for two differ<strong>en</strong>t values of prior diffusion volatility σ 0 are<br />
shown in the right graph of Figure 3.8: a smaller value of the volatility param<strong>et</strong>er leads to a<br />
greater int<strong>en</strong>sity of small jumps.<br />
Here we observe once again the redundancy of volatility and small jumps, this time in an<br />
infinite int<strong>en</strong>sity context. More precisely this example shows that call option prices g<strong>en</strong>erated<br />
from an infinite int<strong>en</strong>sity expon<strong>en</strong>tial Lévy mo<strong>de</strong>l can be reproduced with arbitrary precision<br />
using a jump-diffusion with finite jump int<strong>en</strong>sity. This leads us to conclu<strong>de</strong> that giv<strong>en</strong> a finite<br />
(but realistic) number of option prices, the shape of implied volatility skews/smiles does not<br />
allow to distinguish infinite activity mo<strong>de</strong>ls like variance gamma from jump diffusions.<br />
3.6.2 Empirical properties of implied Lévy measures<br />
To illustrate our calibration m<strong>et</strong>hod we have applied it to a data s<strong>et</strong> spanning the period from<br />
1999 to 2001 and containing daily prices of options on the DAX (German stock mark<strong>et</strong> in<strong>de</strong>x)<br />
for a range of strikes and maturities.<br />
Figure 3.10 shows the calibration quality for three differ<strong>en</strong>t maturities. Note that here<br />
each maturity has be<strong>en</strong> calibrated separately (three differ<strong>en</strong>t expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls). These
124 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
0.4<br />
0.38<br />
Variance gamma<br />
Calibrated with σ=0.25<br />
Calibrated with σ=0.2<br />
15<br />
True VG Levy measure<br />
Calibrated with σ=0.25<br />
Calibrated with σ=0.2<br />
0.36<br />
10<br />
0.34<br />
0.32<br />
5<br />
0.3<br />
0.28<br />
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4<br />
0<br />
−0.5 0 0.5<br />
Figure 3.8: Calibration of options simulated from a variance gamma mo<strong>de</strong>l using a finite int<strong>en</strong>sity<br />
prior with differ<strong>en</strong>t values of diffusion volatility σ 0 . Left: calibration quality (implied<br />
volatilities as a function of strike prices). Right: Calibrated Lévy measures. Increasing the<br />
diffusion coeffici<strong>en</strong>t <strong>de</strong>creases the int<strong>en</strong>sity of small jumps in the calibrated measure.<br />
graphs show that using an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l one can calibrate with high precision the<br />
prices of a s<strong>et</strong> of options with common maturity. This conclusion contradicts the findings of<br />
Medve<strong>de</strong>v and Scaill<strong>et</strong> [70] who observe that “jumps in r<strong>et</strong>urns do not help explaining the slope<br />
of implied volatilities at the money”. It is important to note, however, that Medve<strong>de</strong>v and<br />
Scaill<strong>et</strong> used short term options on S&P 500 in<strong>de</strong>x whereas our analysis is based on DAX in<strong>de</strong>x<br />
options.<br />
Figure 3.9, left graph, illustrates the typical shape of risk neutral Lévy <strong>de</strong>nsities obtained<br />
from our data s<strong>et</strong>. It is readily se<strong>en</strong> that the Lévy measures obtained are far from being<br />
symm<strong>et</strong>ric: the distribution of jump sizes is highly skewed toward negative values. Figure 3.11<br />
shows the same result across cal<strong>en</strong>dar time, showing that this asymm<strong>et</strong>ry persists across time.<br />
This effect also <strong>de</strong>p<strong>en</strong>ds on the maturity of options in question: for longer maturities (see Figure<br />
3.11, right graph) the support of the Lévy measure ext<strong>en</strong>ds further to the left. Most of the<br />
<strong>de</strong>nsities we obtained are bimodal with one mo<strong>de</strong> corresponding to small jumps that are hard<br />
to separate from a diffusion compon<strong>en</strong>t and another clearly distinguishable mo<strong>de</strong> corresponding<br />
to a large negative jump that can reflect the mark<strong>et</strong> participants’ “fear of crash” [11].<br />
The logarithmic scale in the right graph of Figure 3.9 allows the tails to be se<strong>en</strong> more clearly.
3.6. NUMERICAL AND EMPIRICAL TESTS 125<br />
4<br />
3.5<br />
3<br />
2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
Maturity 8 days<br />
Maturity 36 days<br />
Maturity 71 days<br />
Prior<br />
10 1 Maturity 8 days<br />
Maturity 36 days<br />
10 0 Maturity 71 days<br />
Prior<br />
10 −1<br />
10 −2<br />
10 −3<br />
10 −4<br />
10 −5<br />
0<br />
−1 −0.5 0 0.5<br />
10 −6<br />
−1 −0.5 0 0.5<br />
Figure 3.9: Lévy measures calibrated to DAX options on the same cal<strong>en</strong>dar date for three<br />
differ<strong>en</strong>t maturities, linear and logarithmic scale.<br />
1.1<br />
1<br />
0.9<br />
0.8<br />
Maturity 8 days, mark<strong>et</strong><br />
Maturity 8 days, mo<strong>de</strong>l<br />
Maturity 36 days, mark<strong>et</strong><br />
Maturity 36 days, mo<strong>de</strong>l<br />
Maturity 71 days, mark<strong>et</strong><br />
Maturity 71 days, mo<strong>de</strong>l<br />
0.7<br />
0.6<br />
0.5<br />
0.4<br />
0.3<br />
0.2<br />
0.1<br />
3500 4000 4500 5000 5500 6000 6500 7000 7500<br />
Figure 3.10: Calibration quality for differ<strong>en</strong>t maturities: mark<strong>et</strong> implied volatilities for DAX<br />
options against mo<strong>de</strong>l implied volatilities. Each maturity has be<strong>en</strong> calibrated separately.
126 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
5<br />
4.5<br />
4<br />
3.5<br />
11 May 2001, 8 days<br />
11 June 2001, 4 days<br />
11 July 2001, 9 days<br />
Prior<br />
4<br />
3.5<br />
3<br />
11 May 2001, 36 days<br />
11 June 2001, 39 days<br />
11 July 2001, 37 days<br />
Prior<br />
3<br />
2.5<br />
2.5<br />
2<br />
2<br />
1.5<br />
1.5<br />
1<br />
1<br />
0.5<br />
0.5<br />
0<br />
−0.5 −0.4 −0.3 −0.2 −0.1 0 0.1 0.2 0.3 0.4<br />
0<br />
−1 −0.8 −0.6 −0.4 −0.2 0 0.2<br />
Figure 3.11: Results of calibration at differ<strong>en</strong>t dates for shortest (left) and second shortest<br />
(right) maturity. DAX in<strong>de</strong>x options.<br />
Recall that the prior <strong>de</strong>nsity is Gaussian, which shows up as a symm<strong>et</strong>ric parabola on log scales.<br />
The area un<strong>de</strong>r the curves shown here is to be interpr<strong>et</strong>ed as the (risk neutral) jump int<strong>en</strong>sity.<br />
While the shape of the curve does vary slightly across cal<strong>en</strong>dar time, the int<strong>en</strong>sity stays<br />
surprisingly stable: its numerical value is empirically found to be λ ≃ 1, which means around<br />
one jump a year. Of course note that this is the risk neutral int<strong>en</strong>sity: jump int<strong>en</strong>sities are not<br />
invariant un<strong>de</strong>r equival<strong>en</strong>t change of measures. Moreover this illustrates that a small int<strong>en</strong>sity<br />
of jumps λ can be suffici<strong>en</strong>t for explaining the shape of the implied volatility skew for small<br />
maturities. Therefore the motivation of infinite activity processes from the point of view of<br />
option pricing does not seem clear to us. On the other hand, from the mo<strong>de</strong>lling perspective<br />
infinite int<strong>en</strong>sity processes do pres<strong>en</strong>t a particular interest since they do not have a diffusion<br />
compon<strong>en</strong>t and therefore do not suffer from the problem of redundancy of small jumps and<br />
diffusion, <strong>de</strong>scribed above, leading to more parsimonious and i<strong>de</strong>ntifiable mo<strong>de</strong>ls.<br />
3.6.3 Testing time homog<strong>en</strong>eity<br />
While the literature on jump processes in finance has focused on time homog<strong>en</strong>eous (Lévy)<br />
mo<strong>de</strong>ls, practitioners have t<strong>en</strong><strong>de</strong>d to use time <strong>de</strong>p<strong>en</strong><strong>de</strong>nt jump or volatility param<strong>et</strong>ers. Despite<br />
the fact that, as our non-param<strong>et</strong>ric analysis and several empirical studies by other authors<br />
[21, 67] have shown, Lévy processes reproduce the implied volatility smile for a single maturity
3.6. NUMERICAL AND EMPIRICAL TESTS 127<br />
0.28<br />
Implied volatility<br />
0.26<br />
0.24<br />
0.22<br />
0.2<br />
0.18<br />
0.16<br />
0<br />
Maturity<br />
0.5<br />
1<br />
7000<br />
6500<br />
6000<br />
Strike<br />
5500<br />
5000<br />
0.3<br />
Implied volatility<br />
0.28<br />
0.26<br />
0.24<br />
0.22<br />
0.2<br />
0.18<br />
0.16<br />
0<br />
Maturity<br />
0.5<br />
1<br />
7000<br />
6500<br />
6000<br />
Strike<br />
5500<br />
Implied volatility<br />
0.28<br />
0.26<br />
0.24<br />
0.22<br />
0.2<br />
0.18<br />
0.16<br />
0<br />
5000<br />
0.5<br />
Maturity<br />
1<br />
7000<br />
6500<br />
6000<br />
Strike<br />
5500<br />
5000<br />
Figure 3.12: Top: Mark<strong>et</strong> implied volatility surface. Bottom left: implied volatility surface in<br />
an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l, calibrated to mark<strong>et</strong> prices of the first maturity. Bottom right:<br />
implied volatility surface in an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l, calibrated to mark<strong>et</strong> prices of the last<br />
maturity.
128 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
quite well, wh<strong>en</strong> it comes to calibrating several maturities at the same time, the calibration by<br />
Lévy processes becomes much less precise. This is clearly se<strong>en</strong> from the three graphs of Figure<br />
3.12. The top graph shows the mark<strong>et</strong> implied volatilities for four maturities and differ<strong>en</strong>t<br />
strikes. The bottom left graphs <strong>de</strong>picts implied volatilities, computed in an expon<strong>en</strong>tial Lévy<br />
mo<strong>de</strong>l calibrated using our nonparam<strong>et</strong>ric algorithm to the first maturity pres<strong>en</strong>t in the mark<strong>et</strong><br />
data. One can see that while the calibration quality is acceptable for the first maturity, it<br />
quickly <strong>de</strong>teriorates as the time to maturity increases: the smile in an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l<br />
flatt<strong>en</strong>s too fast. The same effect can be observed in the bottom right graph: here, the mo<strong>de</strong>l<br />
was calibrated to the last maturity, pres<strong>en</strong>t in the data. As a result, the calibration quality is<br />
poor for the first maturity: the smile in an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l is more pronounced and its<br />
shape does not resemble that of the mark<strong>et</strong>.<br />
It is difficult to calibrate an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l to options of several maturities because<br />
due to in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce and stationarity of their increm<strong>en</strong>ts, Lévy processes have a very rigid term<br />
structure of cumulants. In particular, the skewness of a Lévy process is proportional to the<br />
inverse square root of time and the excess kurtosis is inversely proportional to time [68]. A<br />
number of empirical studies have compared the term structure of skewness and kurtosis implied<br />
in mark<strong>et</strong> option prices to the skewness and kurtosis of Lévy processes. Bates [13], after an<br />
empirical study of implicit kurtosis in $/DM exchange rate options conclu<strong>de</strong>s that “while<br />
implicit excess kurtosis does t<strong>en</strong>d to increase as option maturity shrinks, . . . , the magnitu<strong>de</strong><br />
of maturity effects is not as large as predicted [by a Lévy mo<strong>de</strong>l]”. For stock in<strong>de</strong>x options,<br />
Madan and Konikov [68] report ev<strong>en</strong> more surprising results: both implied skewness and kurtosis<br />
actually <strong>de</strong>crease as the l<strong>en</strong>gth of the holding period becomes smaller. It should be m<strong>en</strong>tioned,<br />
however, that implied skewness/kurtosis cannot be computed from a finite number of option<br />
prices with high precision.<br />
Our non-param<strong>et</strong>ric approach allows to investigate time homog<strong>en</strong>eity by calibrating the Lévy<br />
measure separately to various option maturities. Figure 3.9 shows Lévy measures obtained by<br />
running the algorithm for options of differ<strong>en</strong>t maturity. The hypothesis of time homog<strong>en</strong>eity<br />
would imply that all the curves are the same, which is appar<strong>en</strong>tly not the case here. However,<br />
computing the areas un<strong>de</strong>r the curves yields similar jump int<strong>en</strong>sities across maturities: this<br />
result can be interpr<strong>et</strong>ed by saying that the risk neutral jump int<strong>en</strong>sity is relatively stable<br />
through time while the shape of the (normalized) jump size <strong>de</strong>nsity can actually change. The
3.6. NUMERICAL AND EMPIRICAL TESTS 129<br />
50<br />
30−day ATM options<br />
450−day ATM options<br />
45<br />
40<br />
35<br />
30<br />
25<br />
20<br />
15<br />
2/01/1996 2/01/1997 2/01/1998 30/12/1998<br />
Figure 3.13: Implied volatility of at the money European options on CAC40 in<strong>de</strong>x.<br />
type of time <strong>de</strong>p<strong>en</strong><strong>de</strong>nce is therefore more complicated than simply a time <strong>de</strong>p<strong>en</strong><strong>de</strong>nt int<strong>en</strong>sity.<br />
A second major difficulty arising while trying to calibrate an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l is the<br />
time evolution of the smile. Expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls belong to the class of so called “sticky<br />
moneyness” mo<strong>de</strong>ls, meaning that in an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l, the implied volatility of an<br />
option with giv<strong>en</strong> moneyness (strike price to spot ratio) does not <strong>de</strong>p<strong>en</strong>d on time. This can<br />
be se<strong>en</strong> from the following simple argum<strong>en</strong>t.<br />
In an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l Q, the implied<br />
volatility σ of a call option with moneyness m, expiring in τ years, satisfies:<br />
e −rτ E Q [(S t e rτ+Xτ − mS t ) + |F t ] = e −rτ σ2<br />
rτ+σWτ −<br />
E[(S t e 2 τ − mS t ) + |F t ]<br />
Due to the in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt increm<strong>en</strong>ts property, S t cancels out and we obtain an equation for<br />
the implied volatility σ which does not contain t or S t . Therefore, in an exp-Lévy mo<strong>de</strong>l this<br />
implied volatility does not <strong>de</strong>p<strong>en</strong>d on date t or stock price S t . This means that once the smile<br />
has be<strong>en</strong> calibrated for a giv<strong>en</strong> date t, its shape is fixed for all future dates. Wh<strong>et</strong>her or not this<br />
is true in real mark<strong>et</strong>s can be tested in a mo<strong>de</strong>l-free way by looking at the implied volatility<br />
of at the money options with the same maturity for differ<strong>en</strong>t dates. Figure 3.13 <strong>de</strong>picts the<br />
behavior of implied volatility of two at the money options on the CAC40 in<strong>de</strong>x, expiring in<br />
30 and 450 days. Since the maturities of available options are differ<strong>en</strong>t for differ<strong>en</strong>t dates, to<br />
obtain the implied volatility of an option with fixed maturity T for each date, we have tak<strong>en</strong><br />
two maturities, pres<strong>en</strong>t in the data, closest to T from above and below: T 1 ≤ T and T 2 > T .
130 CHAPTER 3. NUMERICAL IMPLEMENTATION<br />
The implied volatility Σ(T ) of the hypoth<strong>et</strong>ical option with maturity T was th<strong>en</strong> interpolated<br />
using the following formula:<br />
Σ 2 (T ) = Σ 2 (T 1 ) T 2 − T<br />
T 1 − T + Σ2 (T 2 ) T − T 1<br />
T 2 − T 1<br />
.<br />
As we have se<strong>en</strong>, in an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l the implied volatility of an option which is at<br />
the money and has fixed maturity must not <strong>de</strong>p<strong>en</strong>d on time or stock price. Figure 3.13 shows<br />
that in reality this is not so: both graphs are rapidly varying random functions.<br />
This simple test shows that real mark<strong>et</strong>s do not have the “sticky moneyness” property:<br />
arrival of new information can alter the form of the smile. The expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls are<br />
therefore “not random <strong>en</strong>ough” to account for the time evolution of the smile.<br />
Moreover,<br />
mo<strong>de</strong>ls based on additive processes, that is, time-inhomog<strong>en</strong>eous processes with in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt<br />
increm<strong>en</strong>ts, although they perform well in calibrating the term structure of implied volatilities<br />
for a giv<strong>en</strong> date [27], are not likely to <strong>de</strong>scribe the time evolution of the smile correctly since in<br />
these mo<strong>de</strong>ls the future form of the smile is still a <strong>de</strong>terministic function of its pres<strong>en</strong>t shape<br />
[27]. To <strong>de</strong>scribe the time evolution of the smile in a consist<strong>en</strong>t manner, one may need to<br />
introduce additional stochastic factors (e.g. stochastic volatility) [9, 10, 22].<br />
One of the important conclusions of this chapter is that at least in the domain of stock in<strong>de</strong>x<br />
options, to which we have applied our tests, expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls, although they provi<strong>de</strong> a<br />
consi<strong>de</strong>rable improvem<strong>en</strong>t compared to Black-Scholes mo<strong>de</strong>l, do not allow to calibrate the term<br />
structure of implied volatilities with suffici<strong>en</strong>t precision. Our calibration algorithm therefore<br />
should not be se<strong>en</strong> as a m<strong>et</strong>hod to find an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l consist<strong>en</strong>t with all available<br />
mark<strong>et</strong> data but rather as a way to construct a Lévy measure, implied by option prices of a<br />
particular maturity. It can therefore be ext<strong>en</strong><strong>de</strong>d to other mo<strong>de</strong>ls where jumps are repres<strong>en</strong>ted,<br />
in a nonparam<strong>et</strong>ric way, by a Lévy measure. Its many possible applications inclu<strong>de</strong>, among<br />
others,<br />
• Interpolation of option prices for a single maturity;<br />
• Calibration, using short-maturity data, of the jump part of hybrid mo<strong>de</strong>ls, including both<br />
jumps and stochastic volatility;<br />
• Separate calibration of Lévy <strong>de</strong>nsities for differ<strong>en</strong>t maturities in or<strong>de</strong>r to <strong>de</strong>termine the<br />
correct pattern of time <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of Lévy measure for additive processes.
Part II<br />
Multidim<strong>en</strong>sional mo<strong>de</strong>lling with<br />
Lévy processes<br />
131
Chapter 4<br />
Characterization of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of<br />
multidim<strong>en</strong>sional Lévy processes<br />
4.1 Introduction to <strong>de</strong>p<strong>en</strong><strong>de</strong>nce mo<strong>de</strong>lling<br />
Many financial applications require a multidim<strong>en</strong>sional mo<strong>de</strong>l with jumps, taking into account<br />
the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> compon<strong>en</strong>ts. However, such mo<strong>de</strong>ls are more difficult to construct than<br />
one-dim<strong>en</strong>sional ones and the applications continue to be dominated by (geom<strong>et</strong>ric) Brownian<br />
motion.<br />
A simple m<strong>et</strong>hod to introduce jumps into a multidim<strong>en</strong>sional mo<strong>de</strong>l is to take a multivariate<br />
Brownian motion and time change it with a one-dim<strong>en</strong>sional increasing Lévy process.<br />
This approach, advocated in [36, 79], allows to construct multidim<strong>en</strong>sional versions of many<br />
popular one-dim<strong>en</strong>sional mo<strong>de</strong>ls, including variance gamma, normal inverse Gaussian and g<strong>en</strong>eralized<br />
hyperbolic process. The principal advantage of this m<strong>et</strong>hod is its simplicity and analytic<br />
tractability; in particular, processes of this type are easy to simulate. However, the range of<br />
<strong>de</strong>p<strong>en</strong><strong>de</strong>nce patterns that one can obtain using this approach is quite limited (for instance, in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
is not inclu<strong>de</strong>d), and all compon<strong>en</strong>ts must follow the same param<strong>et</strong>ric mo<strong>de</strong>l (e.g.,<br />
either all of the compon<strong>en</strong>ts are variance gamma or all of the compon<strong>en</strong>ts are normal inverse<br />
Gaussian <strong>et</strong>c.)<br />
To be more specific, suppose that two stock price processes {St 1 } t≥0 and {St 2 } t≥0 are mod-<br />
133
134 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
elled as follows:<br />
S 1 t = exp(X 1 t ), X 1 t = B 1 (Z t ) + µ 1 Z t ,<br />
S 2 t = exp(X 2 t ), X 2 t = B 2 (Z t ) + µ 2 Z t ,<br />
where B 1 and B 2 are two compon<strong>en</strong>ts of a planar Brownian motion, with variances σ 2 1 and<br />
σ 2 2 and correlation coeffici<strong>en</strong>t ρ, and {Z t} t≥0 is the stochastic time change (an increasing Lévy<br />
process). The correlation of r<strong>et</strong>urns, ρ(X 1 t , X 2 t ), can be computed by conditioning with respect<br />
to Z t :<br />
ρ(X 1 t , X 2 t ) =<br />
σ 1 σ 2 ρE[Z t ] + µ 1 µ 2 Var Z t<br />
(σ 2 1 E[Z t] + µ 2 1 Var Z t) 1/2 (σ 2 2 E[Z t] + µ 2 2 Var Z t) 1/2 .<br />
In the compl<strong>et</strong>ely symm<strong>et</strong>ric case (µ 1 = µ 2 = 0) and in this case only ρ(X 1 t , X 2 t ) = ρ: the<br />
correlation of r<strong>et</strong>urns equals the correlation of Brownian motions that are being subordinated.<br />
However, the distributions of real stocks are skewed and in the skewed case the correlation of<br />
r<strong>et</strong>urns will be differ<strong>en</strong>t from the correlation of Brownian motions that we put into the mo<strong>de</strong>l.<br />
Ev<strong>en</strong> if the Brownian motions are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt, the covariance of r<strong>et</strong>urns is equal to µ 1 µ 2 Var Z t<br />
and if the distributions of stocks are not symm<strong>et</strong>ric, they are correlated.<br />
In the symm<strong>et</strong>ric case, if Brownian motions are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt, the two stocks are <strong>de</strong>correlated<br />
but not in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt. Since the compon<strong>en</strong>ts of the Brownian motion are time changed with<br />
the same subordinator, large jumps in the two stocks (that correspond to large jumps of the<br />
subordinator) will t<strong>en</strong>d to arrive tog<strong>et</strong>her, which means that absolute values of r<strong>et</strong>urns will be<br />
correlated. If µ 1 = µ 2 = 0 and ρ = 0 th<strong>en</strong> the covariance of squares of r<strong>et</strong>urns is<br />
Cov((X 1 t ) 2 , (X 2 t ) 2 ) = σ 1 σ 2 Cov((B 1 (Z t )) 2 , (B 2 (Z t )) 2 ) = σ 1 σ 2 Var Z t ,<br />
which means that squares of r<strong>et</strong>urns are correlated unless the subordinator Z t is <strong>de</strong>terministic.<br />
This ph<strong>en</strong>om<strong>en</strong>on can lead to mispricing and errors in evaluation of risk measures.<br />
In finite activity mo<strong>de</strong>ls, a more accurate mo<strong>de</strong>lling of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce may be achieved by<br />
specifying directly the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of individual jumps in one-dim<strong>en</strong>sional compound Poisson<br />
processes (see [65]). This approach is useful in pres<strong>en</strong>ce of few sources of jump risk (e.g., wh<strong>en</strong> all<br />
compon<strong>en</strong>ts jump at the same time) because in this case it allows to achieve a precise <strong>de</strong>scription<br />
of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce within a simple mo<strong>de</strong>l. Suppose that we want to improve a d-dim<strong>en</strong>sional Black-<br />
Scholes mo<strong>de</strong>l by allowing for “mark<strong>et</strong> crashes.” The dates of mark<strong>et</strong> crashes can be mo<strong>de</strong>lled
4.1. INTRODUCTION 135<br />
as jump times of a standard Poisson process {N t } t≥0 . This leads us to the following mo<strong>de</strong>l for<br />
the log-price processes of d ass<strong>et</strong>s:<br />
∑N t<br />
Xt i = µ i t + Bt i + Yj i , i = 1 . . . d,<br />
j=1<br />
where (B t ) is a d-dim<strong>en</strong>sional Brownian motion with covariance matrix Σ, and {Y j } ∞ j=1 are<br />
i.i.d.<br />
d-dim<strong>en</strong>sional random vectors which <strong>de</strong>termine the sizes of jumps in individual ass<strong>et</strong>s<br />
during a mark<strong>et</strong> crash. This mo<strong>de</strong>l contains only one driving Poisson shock because we only<br />
account for jump risk of one type (global mark<strong>et</strong> crash affecting all ass<strong>et</strong>s). To construct a<br />
param<strong>et</strong>ric mo<strong>de</strong>l, we need to specify the distribution of jumps in individual ass<strong>et</strong>s during a<br />
crash (distribution of Y i<br />
∗<br />
a simplifying assumption that {Y i<br />
j }d i=1<br />
for all i) and the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> jumps in ass<strong>et</strong>s. If we make<br />
are Gaussian random vectors, th<strong>en</strong> we need to specify<br />
their covariance matrix Σ ′ and the mean vector m, thus obtaining a multivariate version of<br />
Merton’s mo<strong>de</strong>l [71].<br />
If the jumps are not Gaussian, we must specify the distribution of jumps in each compon<strong>en</strong>t<br />
and the copula 1 <strong>de</strong>scribing their <strong>de</strong>p<strong>en</strong><strong>de</strong>nce.<br />
The mo<strong>de</strong>l is thus compl<strong>et</strong>ely specified by a<br />
covariance matrix Σ, d jump size distributions, a d-dim<strong>en</strong>sional copula C and a jump int<strong>en</strong>sity<br />
param<strong>et</strong>er λ. However, som<strong>et</strong>imes it is necessary to have several in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt shocks to account<br />
for ev<strong>en</strong>ts that affect individual companies or individual sectors rather than the <strong>en</strong>tire mark<strong>et</strong>.<br />
In this case we need to introduce several driving Poisson processes into the mo<strong>de</strong>l, which now<br />
takes the following form:<br />
where N 1 t , . . . , N M t<br />
X i t = µ i t + B i t +<br />
N M∑ ∑t<br />
k Yj,k i , i = 1 . . . d,<br />
k=1 j=1<br />
are Poisson processes driving M in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt shocks and Y i<br />
j,k<br />
is the size of<br />
jump in i-th compon<strong>en</strong>t after j-th shock of type k. The vectors {Yj,k i }d i=1 for differ<strong>en</strong>t j and/or k<br />
are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt. To <strong>de</strong>fine a param<strong>et</strong>ric mo<strong>de</strong>l compl<strong>et</strong>ely, one must specify a one-dim<strong>en</strong>sional<br />
distribution for each compon<strong>en</strong>t for each shock type — because differ<strong>en</strong>t shocks influ<strong>en</strong>ce the<br />
same stock in differ<strong>en</strong>t ways — and one d-dim<strong>en</strong>sional copula for each shock type. This adds up<br />
to M × d one-dim<strong>en</strong>sional distributions and M one-dim<strong>en</strong>sional copulas. How many differ<strong>en</strong>t<br />
1 For an introduction to copulas see [76] — this monograph treats mostly the bivariate case — and [56] for<br />
the multivariate case.
136 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
shocks do we need to <strong>de</strong>scribe suffici<strong>en</strong>tly rich <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures? The answer <strong>de</strong>p<strong>en</strong>ds<br />
on the particular problem, but to <strong>de</strong>scribe all possible <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures, such that the<br />
d-dim<strong>en</strong>sional process remains a Lévy process of compound Poisson type, one needs a total of<br />
2 M − 1 shocks (M shocks that affect only one stock, M(M−1)<br />
2<br />
shocks that affect two stocks <strong>et</strong>c.,<br />
adding up to 2 M − 1). It is clear that as the dim<strong>en</strong>sion of the problem grows, this kind of<br />
mo<strong>de</strong>lling quickly becomes infeasible. Not only the number of param<strong>et</strong>ers grows expon<strong>en</strong>tially,<br />
but also, wh<strong>en</strong> the number of shocks is greater than one, one cannot specify directly the laws<br />
of compon<strong>en</strong>ts because the laws of jumps must be giv<strong>en</strong> separately for each shock.<br />
Comparison of advantages and drawbacks of these two m<strong>et</strong>hods leads to an un<strong>de</strong>rstanding<br />
of the required properties of a multidim<strong>en</strong>sional mo<strong>de</strong>lling approach for Lévy processes.<br />
g<strong>en</strong>eral, such an approach must satisfy the following conditions:<br />
• One should be able to choose any one-dim<strong>en</strong>sional Lévy process for each of the compon<strong>en</strong>ts.<br />
In particular, it should be possible to couple a compound Poisson process with<br />
a process which has infinite jump int<strong>en</strong>sity. This is particularly important for financial<br />
applications because information about margins and about <strong>de</strong>p<strong>en</strong><strong>de</strong>nce may come from<br />
differ<strong>en</strong>t sources. For instance, for pricing bask<strong>et</strong> options the mark<strong>et</strong> practice is to estimate<br />
the correlations (<strong>de</strong>p<strong>en</strong><strong>de</strong>nce) from historical data while using implied volatilities,<br />
computed from the prices of tra<strong>de</strong>d options.<br />
In<br />
• The range of possible <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures should inclu<strong>de</strong> compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce and<br />
compl<strong>et</strong>e in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce with a “smooth” transition b<strong>et</strong>we<strong>en</strong> these two extremes.<br />
• It should be possible to mo<strong>de</strong>l <strong>de</strong>p<strong>en</strong><strong>de</strong>nce in a param<strong>et</strong>ric fashion (e.g., not through<br />
the <strong>en</strong>tire multidim<strong>en</strong>sional Lévy measure). A parsimonious <strong>de</strong>scription of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
is especially important because one typically does not have <strong>en</strong>ough information about<br />
the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure to estimate many param<strong>et</strong>ers or proceed with a nonparam<strong>et</strong>ric<br />
approach.<br />
To implem<strong>en</strong>t this program, we suggest to mo<strong>de</strong>l separately the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure of<br />
a Lévy process and the behavior of its compon<strong>en</strong>ts (margins). It has long be<strong>en</strong> known that<br />
the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure of a random vector on R d can be dis<strong>en</strong>tangled from its margins<br />
via the notion of copula.<br />
Since the law of a Lévy process is compl<strong>et</strong>ely <strong>de</strong>termined by its
4.1. INTRODUCTION 137<br />
distribution at time t for any fixed t > 0, the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure of a multidim<strong>en</strong>sional<br />
Lévy process X ≡ {X i t} i=1...d<br />
t≥0<br />
can be param<strong>et</strong>rized by the copula C t of the random vector<br />
{X i t} i=1...d for some t > 0. However, this approach has a number of drawbacks. First, for giv<strong>en</strong><br />
infinitely divisible one-dim<strong>en</strong>sional laws µ 1 t , . . . , µ d t , it is unclear, which copulas C t will yield a<br />
d-dim<strong>en</strong>sional infinitely divisible law. Second, the copula C t may <strong>de</strong>p<strong>en</strong>d on t and C s for some<br />
s ≠ t cannot in g<strong>en</strong>eral be computed from C t alone; to compute it one also needs to know the<br />
marginal distributions at time t and at time s. We will now construct an explicit example of a<br />
Lévy process with nonconstant copula.<br />
Example 4.1. L<strong>et</strong> Z := {Z t } t≥0 be a 2-dim<strong>en</strong>sional Cauchy process, that is, a Lévy process with<br />
characteristic tripl<strong>et</strong> (0, ν Z , 0), where ν Z has a <strong>de</strong>nsity, also <strong>de</strong>noted by ν Z , giv<strong>en</strong> by<br />
ν Z (x, y) =<br />
1<br />
(x 2 + y 2 ) 3/2 .<br />
The probability distribution of Z t for every t > 0 has a <strong>de</strong>nsity<br />
p Z t (x, y) = 1 t<br />
2π {(x 2 + y 2 ) 2 + t 2 } 3/2 .<br />
The copula of Z t does not <strong>de</strong>p<strong>en</strong>d on time and can be computed explicitly:<br />
⎧ ⎫<br />
C Z (u, v) = − 1 4 + u 2 + v 2 + 1 ⎨<br />
2π arctan tan π(u − 1 2 ) tan π(v − 1 2 ) ⎬<br />
⎩<br />
√1 + tan 2 π(u − 1 2 ) + tan2 π(v − 1 2 ) ⎭ ,<br />
which is clearly differ<strong>en</strong>t from the in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce copula C ⊥ (u, v) = uv.<br />
L<strong>et</strong> W := {W t } t≥0 be a standard planar Brownian motion, in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt from Z. Since the<br />
compon<strong>en</strong>ts of W are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt, the copula of W t for each t > 0 is the in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce copula<br />
C ⊥ (u, v) = uv. For every t, l<strong>et</strong> X t = Z t + W t . {X t } t≥0 is a Lévy process with characteristic<br />
tripl<strong>et</strong> (Id 2 , ν Z , 0).<br />
X t √t<br />
Since Z is a 1-stable process and W is 1 2 -stable, X t<br />
t<br />
d = Z √<br />
t<br />
+ W 1 . Therefore, the random variable Xt<br />
t<br />
d<br />
= Z 1 + W 1/t and<br />
is infinitely divisible with characteristic<br />
tripl<strong>et</strong> ( 1 t Id 2, 0, ν Z ) and the random variable Xt √<br />
t<br />
is infinitely divisible with characteristic tripl<strong>et</strong><br />
(Id 2 , 0, √ tν Z ). From Proposition 1.7 it follows that Xt d<br />
t<br />
−−−→ Z 1 and Xt d<br />
√<br />
t→∞<br />
t<br />
−−→ W 1 . Since the<br />
t→0<br />
copula is invariant with respect to transformations of margins by strictly increasing functions,<br />
X t , Xt √<br />
t<br />
and Xt<br />
t<br />
have the same copula. Therefore, Theorem 2.1 in [64] implies that the copula<br />
C t of X t has the following properties<br />
∀u, v, C t (u, v) → C Z (u, v) as t → ∞,<br />
∀u, v, C t (u, v) → C ⊥ (u, v) as t → 0.
138 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
Since C Z (u, v) is differ<strong>en</strong>t from C ⊥ (u, v), we conclu<strong>de</strong> that C t is not constant over time.<br />
Every Lévy process X := {X t } t≥0 is <strong>de</strong>scribed in a time-<strong>de</strong>p<strong>en</strong><strong>de</strong>nt fashion by its characteristic<br />
tripl<strong>et</strong> (A, ν, γ). It seems therefore natural to <strong>de</strong>scribe the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> compon<strong>en</strong>ts<br />
of X also in terms of its characteristic tripl<strong>et</strong>. Since the continuous martingale compon<strong>en</strong>t of<br />
X is compl<strong>et</strong>ely <strong>de</strong>scribed by the covariance matrix A and is in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt from the jump part,<br />
we will focus on the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of the jump part of X, that is, we only consi<strong>de</strong>r Lévy processes<br />
with A = 0. For such a process, separate mo<strong>de</strong>lling of margins and <strong>de</strong>p<strong>en</strong><strong>de</strong>nce will be<br />
achieved by introducing Lévy copulas, which play the same role for Lévy measures as copulas<br />
for probability measures. After showing how basic <strong>de</strong>p<strong>en</strong><strong>de</strong>nce patterns for Lévy processes are<br />
expressed in terms of their characteristic tripl<strong>et</strong>s in Section 4.2 and introducing the necessary<br />
notation and <strong>de</strong>finitions in Section 4.3, first, in Section 4.4 we treat the conceptually simpler<br />
case of Lévy processes, admitting only positive jumps in every compon<strong>en</strong>t or, equival<strong>en</strong>tly, having<br />
Lévy measures supported by [0, ∞) d . Lévy copulas for g<strong>en</strong>eral Lévy processes, introduced<br />
in a joint work of the pres<strong>en</strong>t author with Jan Kalls<strong>en</strong> [59], are discussed in Sections 4.5 and<br />
4.6 of this chapter.<br />
4.2 Dep<strong>en</strong><strong>de</strong>nce concepts for multidim<strong>en</strong>sional Lévy processes<br />
In this section, X := {X i t} i=1,...,d<br />
t≥0<br />
(A, ν, γ).<br />
<strong>de</strong>notes a Lévy process on R d with characteristic tripl<strong>et</strong><br />
For I ⊂ {1, . . . , d} we <strong>de</strong>fine I c := {1, . . . , d} \ I and |I| <strong>de</strong>notes the number of<br />
elem<strong>en</strong>ts in I. We start by <strong>de</strong>fining the margins of a Lévy process.<br />
Definition 4.1. L<strong>et</strong> I ⊂ {1, . . . , d} nonempty. The I-margin of X is the Lévy process X I :=<br />
{X i t} i∈I<br />
t≥0 .<br />
The following lemma explains that the Lévy measure of X I<br />
measure of X and shows how it can be computed.<br />
only <strong>de</strong>p<strong>en</strong>ds on the Lévy<br />
Lemma 4.1 (Marginal Lévy measures). L<strong>et</strong> I ⊂ {1, . . . , d} nonempty.<br />
process X I has Lévy measure ν I giv<strong>en</strong> by<br />
Th<strong>en</strong> the Lévy<br />
ν I (B) = ν({x ∈ R d : (x i ) i∈I ∈ B}), ∀B ∈ B(R |I| \ {0}). (4.1)<br />
Proof. This lemma is a direct consequ<strong>en</strong>ce of Proposition 11.10 in [87].
4.2. DEPENDENCE CONCEPTS FOR LEVY PROCESSES 139<br />
In view of the above lemma, for a giv<strong>en</strong> Lévy measure ν we will refer to the Lévy measure<br />
ν I <strong>de</strong>fined by Equation (4.5) as the I-margin of ν. To simplify notation, wh<strong>en</strong> I = {k} for some<br />
k, the I-margin of ν will be <strong>de</strong>noted by ν k and called simply k-th margin of ν.<br />
Next we would like to characterize the in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce of Lévy processes in terms of their<br />
characteristic tripl<strong>et</strong>s.<br />
Lemma 4.2. The compon<strong>en</strong>ts X 1 , . . . , X d of an R d -valued Lévy process X are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt<br />
if and only if their continuous martingale parts are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt and the Lévy measure ν is<br />
supported by the coordinate axes. ν is th<strong>en</strong> giv<strong>en</strong> by<br />
ν(B) =<br />
d∑<br />
ν i (B i ) ∀B ∈ B(R d \ {0}), (4.2)<br />
i=1<br />
where for every i, ν i <strong>de</strong>notes the i-th margin of ν and<br />
B i = {x ∈ R : ( 0, . . . , 0<br />
} {{ }<br />
, x, 0, . . . , 0) ∈ B}.<br />
i − 1 times<br />
Proof. Since the continuous martingale part and the jump part of X are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt, we<br />
can assume without loss of g<strong>en</strong>erality that X has no continuous martingale part, that is, its<br />
characteristic tripl<strong>et</strong> is giv<strong>en</strong> by (0, ν, γ).<br />
The “if” part. Suppose ν is supported by the coordinate axes. Th<strong>en</strong> necessarily for every<br />
B ∈ B(R d \ {0}), ν(B) = ∑ d<br />
i=1 ˜ν i(B i ) with some measures ˜ν i , and Lemma 4.1 show that these<br />
measures coinci<strong>de</strong> with the margins of ν: ˜ν i = ν i ∀i. Using the Lévy-Khintchine formula for<br />
the process X, we obtain:<br />
∫<br />
E[e i〈u,Xt〉 ] = exp t{i〈γ, u〉 + (e i〈u,x〉 − 1 − i〈u, x〉1 |x|≤1 )ν(dx)}<br />
R d \{0}<br />
d∑<br />
∫<br />
= exp t {iγ k u k + (e iu kx k<br />
− 1 − iu k x k 1 |xk |≤1)ν k (dx k )} =<br />
k=1<br />
R\{0}<br />
which shows that the compon<strong>en</strong>ts of X are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt Lévy processes.<br />
d∏<br />
E[e iu kXt k ],<br />
The “only if” part. Define a measure ˜ν on R d \ {0} by ˜ν(B) = ∑ d<br />
i=1 ν i(B i ), where ν i is the<br />
i-th marginal Lévy measure of X and B i is as above. It is straightforward to check that ˜ν is<br />
a Lévy measure. Since the compon<strong>en</strong>ts of X are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt, applying the Lévy-Khintchine<br />
formula to each compon<strong>en</strong>t of X, we find:<br />
∫<br />
E[e i〈u,Xt〉 ] = exp t{i〈γ, u〉 +<br />
R d \{0}<br />
k=1<br />
(e i〈u,x〉 − 1 − i〈u, x〉1 |x|≤1 )˜ν(dx)}.
140 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
Now from the uniqu<strong>en</strong>ess of Lévy-Khintchine repres<strong>en</strong>tation we conclu<strong>de</strong> that ˜ν is the Lévy<br />
measure of X.<br />
The compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of Lévy processes is a new notion that is worth being discussed<br />
in <strong>de</strong>tail. First, the following <strong>de</strong>finition is in or<strong>de</strong>r.<br />
Definition 4.2. A subs<strong>et</strong> S of R d is called or<strong>de</strong>red if, for any two vectors v, u ∈ S, either<br />
v k ≤ u k , k = 1, . . . , d or v k ≥ u k , k = 1, . . . , d. S is called strictly or<strong>de</strong>red if, for any two<br />
differ<strong>en</strong>t vectors v, u ∈ S, either v k < u k , k = 1, . . . , d or v k > u k , k = 1, . . . , d.<br />
We recall that random variables Y 1 , . . . , Y d are said to be compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt or comonotonic<br />
if there exists a strictly or<strong>de</strong>red s<strong>et</strong> S ⊂ R d such that (Y 1 , . . . , Y d ) ∈ S with probability 1.<br />
However, saying that the compon<strong>en</strong>ts of a Lévy process are compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt only if they<br />
are compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt for every fixed time is too restrictive; the compon<strong>en</strong>ts of a Lévy process<br />
can be compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt as processes without being compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt as random<br />
variables for every fixed time. The following example clarifies this point.<br />
Example 4.2 (Dynamic compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce for Lévy processes). L<strong>et</strong> {X t } t≥0 be a Lévy process<br />
with characteristic tripl<strong>et</strong> (A, ν, γ) such that A = 0 and γ = 0 and l<strong>et</strong> {Y t } t≥0 be a Lévy process,<br />
constructed from the jumps of X: Y t = ∑ s≤t ∆X3 s . From the dynamic point of view X and Y<br />
are compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt, because the trajectory of any one of them can be reconstructed from<br />
the trajectory of the other. However, the copula of X t and Y t is not that of compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
because Y t is not a <strong>de</strong>terministic function of X t . In<strong>de</strong>ed, if X is a compound Poisson process<br />
having jumps of size 1 and 2 and X t = 3 for some t, this may either mean that X has three<br />
jumps of size 1 in the interval [0, t], and th<strong>en</strong> Y t = 3, or that X has one jump of size 1 and one<br />
jump of size 2, and th<strong>en</strong> Y t = 9.<br />
This example motivates the following <strong>de</strong>finition. In this <strong>de</strong>finition and below,<br />
K := {x ∈ R d : sgn x 1 = · · · = sgn x d }. (4.3)<br />
Definition 4.3. L<strong>et</strong> X be a R d -valued Lévy process. Its jumps are said to be compl<strong>et</strong>ely<br />
<strong>de</strong>p<strong>en</strong><strong>de</strong>nt or comonotonic if there exists a strictly or<strong>de</strong>red subs<strong>et</strong> S ⊂ K such that ∆X t :=<br />
X t − X t− ∈ S, t ≥ 0 (except for a s<strong>et</strong> of paths having zero probability).
4.3. INCREASING FUNCTIONS 141<br />
Clearly, an elem<strong>en</strong>t of a strictly or<strong>de</strong>red s<strong>et</strong> is compl<strong>et</strong>ely <strong>de</strong>termined by one coordinate<br />
only. Therefore, if the jumps of a Lévy process are compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt, the jumps of all<br />
compon<strong>en</strong>ts can be <strong>de</strong>termined from the jumps of any single compon<strong>en</strong>t. If the Lévy process<br />
has no continuous martingale part, th<strong>en</strong> the trajectories of all compon<strong>en</strong>ts can be <strong>de</strong>termined<br />
from the trajectory of any one compon<strong>en</strong>t, which indicates that Definition 4.3 is a reasonable<br />
dynamic notion of compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce for Lévy processes. The condition ∆X t ∈ K means that<br />
if the compon<strong>en</strong>ts of a Lévy process are comonotonic, they always jump in the same direction.<br />
For any R d -valued Lévy process X with Lévy measure ν and for any B ∈ B(R d \ {0}) the<br />
number of jumps in the time interval [0, t] with sizes in B is a Poisson random variable with<br />
param<strong>et</strong>er tν(B). Therefore, Definition 4.3 can be equival<strong>en</strong>tly restated in terms of the Lévy<br />
measure ν of X as follows:<br />
Definition 4.4. L<strong>et</strong> X be a R d -valued Lévy process with Lévy measure ν. Its jumps are said<br />
to be compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt or comonotonic if there exists a strictly or<strong>de</strong>red subs<strong>et</strong> S of K such<br />
that ν(R d \ S) = 0.<br />
4.3 Increasing functions<br />
In this section we sum up some aspects of the theory of increasing functions of several variables.<br />
Most <strong>de</strong>finitions are well known (see, e.g. [88]) but some are introduced either here for the first<br />
time or in [59].<br />
L<strong>et</strong> ¯R := R ∪ {−∞} ∪ {∞} <strong>de</strong>note the ext<strong>en</strong><strong>de</strong>d real line. In the sequel, for a, b ∈ ¯R d such<br />
that a ≤ b (inequalities like this one are to be interpr<strong>et</strong>ed compon<strong>en</strong>twise), l<strong>et</strong> [a, b) <strong>de</strong>note a<br />
right-op<strong>en</strong> left-closed interval of ¯R d (d-box):<br />
[a, b) := [a 1 , b 1 ) × · · · × [a d , b d ),<br />
In the same way we <strong>de</strong>fine other types of intervals: (a, b], [a, b] and (a, b). To simplify notation it<br />
is conv<strong>en</strong>i<strong>en</strong>t to introduce a “g<strong>en</strong>eral” type of interval: wh<strong>en</strong> we want to consi<strong>de</strong>r a d-dim<strong>en</strong>sional<br />
interval as a s<strong>et</strong> of its vertices, without specifying wh<strong>et</strong>her the boundary is inclu<strong>de</strong>d or not, we<br />
will write |a, b|.
142 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
Definition 4.5 (F-volume). L<strong>et</strong> F : S ⊂ ¯R d → ¯R. For a, b ∈ S, with a ≤ b, the F -volume of<br />
|a, b| is <strong>de</strong>fined by<br />
V F (|a, b|) := ∑ (−1) N(c) F (c), (4.4)<br />
where the sum is tak<strong>en</strong> over all vertices c of |a, b|, and N(c) := #{k : c k = a k }.<br />
The notion of F-volume should only be se<strong>en</strong> as a conv<strong>en</strong>i<strong>en</strong>t notation for the sum in the<br />
right-hand si<strong>de</strong> of (4.4). It does not in g<strong>en</strong>eral correspond to any measure because the measure<br />
of |a, b| will <strong>de</strong>p<strong>en</strong>d on wh<strong>et</strong>her the boundary is inclu<strong>de</strong>d or not.<br />
In particular, in two dim<strong>en</strong>sions (d = 2) the F -volume of a rectangle B = |x 1 , x 2 | × |y 1 , y 2 |<br />
satisfies<br />
V F (B) = F (x 2 , y 2 ) − F (x 2 , y 1 ) − F (x 1 , y 2 ) + F (x 1 , y 1 ).<br />
If F (u) = ∏ d<br />
i=1 u i, the F -volume of any interval is equal to its Lebesgue measure.<br />
Definition 4.6 (d-increasing function). A function F : S ⊂ ¯R d → ¯R is called d-increasing<br />
if for all a, b ∈ S with a ≤ b, V F (|a, b|) ≥ 0.<br />
Definition 4.7 (Groun<strong>de</strong>d function). For each k, l<strong>et</strong> S k ⊂ ¯R be such that inf S k ∈ S k . A<br />
function F : S 1 × · · · × S d → ¯R is groun<strong>de</strong>d if F (x 1 , . . . , x d ) = 0 wh<strong>en</strong>ever x k = inf S k for at<br />
least one k.<br />
Definition 4.8 (margins of a d-increasing groun<strong>de</strong>d function). For each k, l<strong>et</strong> S k ⊂ ¯R<br />
be such that inf S k ∈ S k and sup S k ∈ S k and l<strong>et</strong> F : S 1 × · · · × S d → ¯R be d-increasing and<br />
groun<strong>de</strong>d. Th<strong>en</strong> for I ⊂ {1, . . . , d} nonempty, the I-margin of F is a function F I : ∏ i∈I S i → ¯R<br />
<strong>de</strong>fined by<br />
F I ((x i ) i∈I ) := F (x 1 , . . . , x d )| xi =sup S i , i∈Ic. (4.5)<br />
Wh<strong>en</strong> I = {k}, to simplify notation, the (one-dim<strong>en</strong>sional) I-margin of F is <strong>de</strong>noted by F k .<br />
Example 4.3. The distribution function F of a random vector X ∈ R d is usually <strong>de</strong>fined by<br />
F (x 1 , . . . , x d ) := P [X 1 ≤ x 1 , . . . , X d ≤ x d ]
4.3. INCREASING FUNCTIONS 143<br />
for x 1 , . . . , x d ∈ ¯R. F is th<strong>en</strong> clearly increasing because for every a, b ∈ ¯R d with a ≤ b,<br />
V F (|a, b|) = P [X ∈ (a, b]] (4.6)<br />
It is groun<strong>de</strong>d because F (x 1 , . . . , x d ) = 0 if x k = −∞ for some k, and the margins of F are the<br />
distribution functions of the margins of X: for example, F 1 (x) = F (x, ∞, . . . , ∞) = P [X 1 ≤ x].<br />
The following technical lemma will be useful in the sequel.<br />
Lemma 4.3. For each k, l<strong>et</strong> S k ⊂ ¯R be such that inf S k ∈ S k and l<strong>et</strong> F, H : S 1 × · · · × S d → ¯R<br />
be d-increasing and groun<strong>de</strong>d. Th<strong>en</strong> their product F H is d-increasing and groun<strong>de</strong>d.<br />
Proof. We will prove this lemma by induction on d. The product of two increasing groun<strong>de</strong>d<br />
functions on ¯R is clearly increasing and groun<strong>de</strong>d. Suppose d ≥ 2, and for each k l<strong>et</strong> a k , b k ∈ S k<br />
with a k ≤ b k . Consi<strong>de</strong>r the function<br />
˜F (u 2 , . . . , u d ) := F (b 1 , u 2 , . . . , u d )H(b 1 , u 2 , . . . , u d ) − F (a 1 , u 2 , . . . , u d )H(a 1 , u 2 , . . . , u d )<br />
= H(a 1 , u 2 , . . . , u d )[F (b 1 , u 2 , . . . , u d ) − F (a 1 , u 2 , . . . , u d )]<br />
+ F (b 1 , u 2 , . . . , u d )[H(b 1 , u 2 , . . . , u d ) − H(a 1 , u 2 , . . . , u d )]<br />
Since H is groun<strong>de</strong>d,<br />
V H(a1 ,∗)(|a 2 , b 2 | × · · · × |a d , b d |) = V H (|0, a 1 | × |a 2 , b 2 | × · · · × |a d , b d |) ≥ 0,<br />
V H(b1 ,∗)−H(a 1 ,∗)(|a 2 , b 2 | × · · · × |a d , b d |) = V H (|a 1 , b 1 | × |a 2 , b 2 | × · · · × |a d , b d |) ≥ 0,<br />
and the same is true for F . Therefore ˜F is increasing by the induction hypothesis. Since<br />
V F H (|a 1 , b 1 | × · · · × |a d , b d |) = V ˜F<br />
(|a 2 , b 2 | × · · · × |a d , b d |),<br />
this finishes the proof of the lemma.<br />
To <strong>de</strong>velop the theory of Lévy copulas for g<strong>en</strong>eral Lévy processes, we will need to <strong>de</strong>fine the<br />
notion of margins for a function that is not groun<strong>de</strong>d. The following example gives an intuition<br />
of how this can be done.<br />
Example 4.4. Consi<strong>de</strong>r the following “alternative” <strong>de</strong>finition of a distribution function of a<br />
random vector X:<br />
d∏<br />
˜F (x 1 , . . . , x d ) := P [X 1 ∈ (x 1 ∧ 0, x 1 ∨ 0]; . . . ; X d ∈ (x d ∧ 0, x d ∨ 0]] sgn x i (4.7)<br />
i=1
144 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
for x 1 , . . . x d ∈ ¯R. This function satisfies Equation (4.6) and can therefore play the role of a<br />
distribution function. However, the margins of ˜F (e.g. the distribution functions computed<br />
using Equation (4.7) for the compon<strong>en</strong>ts of X) are no longer giv<strong>en</strong> by (4.5). It can be shown<br />
that<br />
˜F I ((x i ) i∈I ) := P [X i ∈ (x i ∧ 0, x i ∨ 0], i ∈ I] ∏ i∈I<br />
sgn x i<br />
=<br />
∑<br />
(x i ) i∈I c ∈{−∞,∞} |Ic |<br />
˜F (x 1 , . . . , x d ) ∏ i∈I c sgn x i .<br />
The above example motivates the following <strong>de</strong>finitions.<br />
notion of “increasing and groun<strong>de</strong>d” function.<br />
First, we need to g<strong>en</strong>eralize the<br />
Definition 4.9 (Volume function). L<strong>et</strong> S k ⊂ ¯R for k = 1, . . . , d. A function F : S 1 × · · ·×S d<br />
is called volume function if it is d-increasing and there exists x ∗ ∈ S 1 × · · · × S d such that<br />
F (x 1 , . . . , x d ) = 0 wh<strong>en</strong>ever x k = x ∗ k<br />
for some k.<br />
The term “volume function” is due to the fact that an increasing function is a volume<br />
function if and only if there exists x ∗ ∈ S 1 × · · · × S d such that<br />
d∏<br />
F (x 1 , . . . , x d ) = V F (|x 1 ∧ x ∗ 1, x 1 ∨ x ∗ 1| × · · · × |x d ∧ x ∗ d , x d ∨ x ∗ d |) sgn(x i − x ∗ i )<br />
for all x ∈ S 1 ×· · ·×S d . Every increasing groun<strong>de</strong>d function is a volume function. The function<br />
˜F , <strong>de</strong>fined in Example 4.4 is a volume function but is not groun<strong>de</strong>d.<br />
Definition 4.10 (Margins of a volume function). L<strong>et</strong> S k ⊂ ¯R for k = 1, . . . , d and l<strong>et</strong><br />
F : S 1 × · · · × S d → ¯R be a volume function. Th<strong>en</strong> for I ⊂ {1, . . . , d} nonempty, the I-margin<br />
of F is a function F I : ∏ i∈I S i → ¯R <strong>de</strong>fined by<br />
( )<br />
∏<br />
F I ((x i ) i∈I ) := sgn(x i − x ∗ i )<br />
i∈I<br />
∑<br />
× sup<br />
(−1) N((x i) i∈I c ) F (x 1 , . . . , x d ), (4.8)<br />
a i ,b i ∈S i :i∈I c<br />
(x i ) i∈I c ∈ ∏<br />
j∈I c{a j,b j }<br />
where N((x i ) i∈I c) = #{i ∈ I c : x i = a i }.<br />
In particular, for d = 2 we have F 1 (x) = sgn(x − x ∗ ) sup y1 ,y 2 ∈S 2<br />
{F (x, y 2 ) − F (x, y 1 )}.<br />
Equation (4.8) looks so complicated because it applies without modification to all cases that<br />
i=1
4.3. INCREASING FUNCTIONS 145<br />
are of interest to us: distribution functions, copulas, Lévy copulas with closed or op<strong>en</strong> domains.<br />
In particular cases we will obtain simplifications that are easier to work with. Using the F-<br />
volume notation, Equation (4.8) can be rewritt<strong>en</strong> as follows:<br />
⎛ ⎧<br />
⎞<br />
( )<br />
∏<br />
F I ((x i ) i∈I ) = sgn(x i − x ∗ ⎜<br />
d∏<br />
⎪⎨ |x i ∧ x ∗ i , x i ∨ x ∗ i |, i ∈ I ⎟<br />
i ) sup V F ⎝<br />
⎠ .<br />
i∈I<br />
a i ,b i ∈S i :a i ≤b i ,i∈I c i=1<br />
⎪⎩ |a i , b i |, i ∈ I c<br />
(4.9)<br />
Wh<strong>en</strong> F satisfies the conditions of Definition 4.8, since F is d-increasing, the sup is achieved<br />
wh<strong>en</strong> for every i ∈ I c , a i = inf S i and b i = sup S i . Therefore, in this case the above formula<br />
yields F I ((x i ) i∈I ) = F (x 1 , . . . , x d )| xi =sup S i , i∈I c<br />
and the two <strong>de</strong>finitions coinci<strong>de</strong>.<br />
The following important property of increasing functions will be useful in the sequel.<br />
Lemma 4.4. L<strong>et</strong> S k ⊂ ¯R for k = 1, . . . , d and l<strong>et</strong> F : S 1 × · · · × S d → ¯R be a volume function.<br />
L<strong>et</strong> (x 1 , . . . , x d ) and (y 1 , . . . , y d ) be any points in Dom F . Th<strong>en</strong><br />
|F (x 1 , . . . , x d ) − F (y 1 , . . . , y d )| ≤<br />
Proof. From the triangle inequality,<br />
d∑<br />
|F k (x k ) − F k (y k )|. (4.10)<br />
k=1<br />
|F (x 1 , . . . , x d ) − F (y 1 , . . . , y d )| ≤ |F (x 1 , . . . , x d ) − F (y 1 , x 2 . . . , x d )| + . . .<br />
+ |F (y 1 , . . . , y d−1 , x d ) − F (y 1 , . . . , y d )|,<br />
h<strong>en</strong>ce it suffices to prove that<br />
|F (x 1 , . . . , x d ) − F (y 1 , x 2 . . . , x d )| ≤ |F 1 (x 1 ) − F 1 (y 1 )|. (4.11)<br />
Without loss of g<strong>en</strong>erality suppose that x 1 ≥ y 1 ≥ x ∗ 1 and that x k ≥ x ∗ k<br />
B := |x ∗ 2 , x 2| × · · · × |x ∗ d , x d|. Th<strong>en</strong><br />
for k = 2, . . . , d and l<strong>et</strong><br />
F (x 1 , . . . , x d ) − F (y 1 , x 2 . . . , x d ) = V F (|y 1 , x 1 | × B). (4.12)<br />
Moreover, for all x ≥ x ∗ 1 ,<br />
F 1 (x) =<br />
sup V F (|x ∗ 1, x| × |a 2 , b 2 | × · · · × |a d , b d |).<br />
a i ,b i ∈S i :a i ≤b i ,i=2,...,d
146 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
Fix ε > 0 and choose a i , b i ∈ S i : a i ≤ b i , i = 2, . . . , d such that<br />
F 1 (y 1 ) ≤ ε + V F (|x ∗ 1, y 1 | × |a 2 , b 2 | × · · · × |a d , b d |).<br />
For i = 2, . . . , d l<strong>et</strong> ã i := a i ∧ x ∗ i and ˜b i := b i ∨ x i and <strong>de</strong>note ˜B := |ã 2 , ˜b 2 | × · · · × |ã d , ˜b d |. Th<strong>en</strong>,<br />
since F is d-increasing, V F (|y 1 , x 1 | × B) ≤ V F (|y 1 , x 1 | × ˜B) and V F (|x ∗ 1 , y 1| × |a 2 , b 2 | × · · · ×<br />
|a d , b d |) ≤ V F (|x ∗ 1 , y 1| × ˜B). Therefore<br />
V F (|y 1 , x 1 | × B) ≤ V F (|x ∗ 1, x 1 | × ˜B) − F 1 (y 1 ) + ε ≤ F 1 (x 1 ) − F 1 (y 1 ) + ε.<br />
Since the above is true for all ε > 0, in view of (4.12), the proof of (4.11) is compl<strong>et</strong>e.<br />
We close this section with the <strong>de</strong>finition of (ordinary) copula and the Sklar’s theorem, which<br />
relates copulas to distribution functions. The proof of Sklar’s theorem can be found in [90].<br />
Definition 4.11 (Copula). A d-dim<strong>en</strong>sional copula (a d-copula) is a function C : [0, 1] d →<br />
[0, 1] such that<br />
1. C is groun<strong>de</strong>d and d-increasing.<br />
2. C has margins C k , k = 1, 2, . . . , d, which satisfy C k (u) = u for all u in [0, 1].<br />
Theorem 4.5 (Sklar). L<strong>et</strong> F be a d-dim<strong>en</strong>sional distribution function with margins F 1 , . . . , F d .<br />
Th<strong>en</strong> there exists a d-dim<strong>en</strong>sional copula C such that for all x ∈ ¯R d ,<br />
F (x 1 , x 2 , . . . , x d ) = C(F 1 (x 1 ), F 2 (x 2 ), . . . , F d (x d )). (4.13)<br />
If F 1 , . . . , F d are continuous th<strong>en</strong> C is unique; otherwise, C is uniquely <strong>de</strong>termined on Ran F 1 ×<br />
· · · × Ran F d . Conversely, if C is a d-copula and F 1 , . . . , F d are distribution functions, th<strong>en</strong> the<br />
function F <strong>de</strong>fined by (4.13) is a d-dim<strong>en</strong>sional distribution function with margins F 1 , . . . , F d .<br />
4.4 Lévy copulas for spectrally positive Lévy processes<br />
This section discusses the notion of Lévy copula for Lévy processes with only positive jumps in<br />
each compon<strong>en</strong>t. This notion was introduced by the pres<strong>en</strong>t author in [92]. Examples of Lévy<br />
copulas for spectrally positive Lévy processes and m<strong>et</strong>hods to construct them will be giv<strong>en</strong> in<br />
Sections 4.6 and 5.1 tog<strong>et</strong>her with the examples of g<strong>en</strong>eral Lévy copulas. Further properties of
4.4. LEVY COPULAS: SPECTRALLY POSITIVE CASE 147<br />
Lévy copulas in the spectrally positive case, including a characterization of the converg<strong>en</strong>ce of<br />
Lévy measures in terms of Lévy copulas can be found in a rec<strong>en</strong>t paper by Barndorff-Niels<strong>en</strong><br />
and Lindner [8].<br />
As the laws of random variables are repres<strong>en</strong>ted by their distribution functions, Lévy measures<br />
can be repres<strong>en</strong>ted by their tail integrals.<br />
Definition 4.12. L<strong>et</strong> ν be a Lévy measure on R d + := [0, ∞) d \ {0}. The tail integral U of ν is<br />
a function [0, ∞) d → [0, ∞] such that<br />
1. U(0, . . . , 0) = ∞.<br />
2. For (x 1 , . . . , x d ) ∈ R d +,<br />
U(x 1 , . . . , x d ) = ν([x 1 , ∞) × · · · × [x d , ∞)).<br />
The Lévy measure is uniquely <strong>de</strong>termined by its tail integral, because the above <strong>de</strong>finition<br />
implies that for every x, y ∈ R d + with x ≤ y,<br />
V U (|x, y|) = (−1) d ν([x 1 , y 1 ) × · · · × [x d , y d )). (4.14)<br />
Definition 4.13. L<strong>et</strong> X be a R d -valued Lévy process and l<strong>et</strong> I ⊂ {1, . . . , d} non-empty. The<br />
I-marginal tail integral U I of X is the tail integral of the process X I := (X i ) i∈I . The onedim<strong>en</strong>sional<br />
margins are, as usual, <strong>de</strong>noted by U i := U {i} .<br />
Lemma 4.1 <strong>en</strong>tails that for I ⊂ {1, . . . , d} nonempty, the I-marginal tail integral of a Lévy<br />
measure ν on R d + can be computed from the tail integral U of ν by substituting 0 instead of<br />
argum<strong>en</strong>ts with indices not in I:<br />
U I ((x i ) i∈I ) = U(x 1 , . . . , x d )| (xi ) i∈I c =0. (4.15)<br />
A Lévy copula is <strong>de</strong>fined similarly to ordinary copula but on a differ<strong>en</strong>t domain.<br />
Definition 4.14. A function F : [0, ∞] d → [0, ∞] is a Lévy copula if<br />
1. F (u 1 , . . . , u d ) < ∞ for (u 1 , . . . , u d ) ≠ (∞, . . . , ∞),<br />
2. F is groun<strong>de</strong>d: F (u 1 , . . . , u d ) = 0 wh<strong>en</strong>ever u i = 0 for at least one i ∈ {1, . . . , d},
148 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
3. F is d-increasing,<br />
4. F i (u) = u for any i ∈ {1, . . . , d}, u ∈ [0, ∞].<br />
The following theorem is an analog of the well-known Sklar’s theorem for copulas. The<br />
proof is done using multilinear interpolation and is inspired by Sklar’s proof of his theorem in<br />
[90].<br />
Theorem 4.6. L<strong>et</strong> ν be a Lévy measure on R d + with tail integral U and marginal Lévy measures<br />
ν 1 , . . . , ν d . There exists a Lévy copula F on [0, ∞] d such that<br />
U(x 1 , . . . , x d ) = F (U 1 (x 1 ), . . . , U d (x d )), (x 1 , . . . , x d ) ∈ [0, ∞) d , (4.16)<br />
where U 1 , . . . , U d are tail integrals of ν 1 , . . . , ν d . This Lévy copula is unique on ∏ d<br />
i=1 Ran U i.<br />
Conversely, if F is a Lévy copula on [0, ∞] d and ν 1 , . . . , ν d are Lévy measures on (0, ∞)<br />
with tail integrals U 1 , . . . , U d th<strong>en</strong> Equation (4.16) <strong>de</strong>fines a tail integral of a Lévy measure on<br />
R d + with marginal Lévy measures ν 1 , . . . , ν d .<br />
Remark 4.1. In particular, the Lévy copula F is unique if the marginal Lévy measures ν 1 , . . . , ν d<br />
are infinite and have no atoms, because in this case Ran U k = [0, ∞] for every k.<br />
The first part of this theorem states that all types of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of Lévy processes (with<br />
only positive jumps), including compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce and in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce, can be repres<strong>en</strong>ted<br />
with Lévy copulas. The second part shows that one can construct multivariate Lévy process<br />
mo<strong>de</strong>ls by specifying separately jump <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure and one-dim<strong>en</strong>sional laws for the<br />
compon<strong>en</strong>ts. The laws of compon<strong>en</strong>ts can have very differ<strong>en</strong>t structure, in particular, it is possible<br />
to construct examples of Lévy processes with some compon<strong>en</strong>ts being compound Poisson<br />
and others having an infinite jump int<strong>en</strong>sity.<br />
Proof of theorem 4.6. For the purposes of this proof, we introduce some auxiliary functions and<br />
measures. First, for every k = 1, . . . , d and every x ∈ [0, ∞] we <strong>de</strong>fine<br />
⎧<br />
⎪⎨ U k (x), x ≠ ∞<br />
Ũ k (x) :=<br />
⎪⎩ 0, x = ∞.<br />
Ũ (−1)<br />
k<br />
(t) := sup{x ≥ 0 : Ũk(x) ≥ t}.
4.4. LEVY COPULAS: SPECTRALLY POSITIVE CASE 149<br />
The following properties of Ũ (−1)<br />
k<br />
follow directly from its <strong>de</strong>finition:<br />
Ũ (−1)<br />
k<br />
(t) is nonincreasing in t,<br />
Ũ (−1)<br />
k<br />
(∞) = 0, (4.17)<br />
Ũ k (Ũ (−1)<br />
k<br />
(t)) = t ∀t ∈ Ran Ũk. (4.18)<br />
For every (x 1 , . . . , x d ) ∈ [0, ∞] d , we <strong>de</strong>fine<br />
⎧<br />
⎪⎨<br />
0, x k = ∞ for some k<br />
Ũ(x 1 , . . . , x d ) =<br />
⎪⎩ U(x 1 , . . . , x d ), otherwise.<br />
Finally, introduce a measure ˜ν on [0, ∞] d \{0} by ˜ν(B) := ν(B ∩R d +) for all B ∈ B([0, ∞] d \{0}).<br />
Clearly, Equation (4.14) still holds for all x, y ∈ [0, ∞] d \{0} with x ≤ y, if U and ν are replaced<br />
by Ũ and ˜ν.<br />
First part. To prove the exist<strong>en</strong>ce of a Lévy copula, we construct the required Lévy copula<br />
in two stages.<br />
1. First consi<strong>de</strong>r the function ˜F : D := Ran Ũ1 × · · · × Ran Ũd → [0, ∞] <strong>de</strong>fined by<br />
˜F (x 1 , . . . , x d ) =<br />
Ũ(Ũ<br />
(−1)<br />
1 (x 1 ), . . . , Ũ (−1)<br />
d<br />
(x d )).<br />
Suppose that x k = 0 for some k. Without loss of g<strong>en</strong>erality we can take k = 1. Th<strong>en</strong><br />
˜F (0, x 2 , . . . , x d ) =<br />
Ũ(z, Ũ<br />
(−1)<br />
2 (x 2 ), . . . , Ũ (−1)<br />
d<br />
(x d )),<br />
where z is such that Ũ1(z) = 0. Since Ũ is nonnegative and nonincreasing in each argum<strong>en</strong>t,<br />
0 ≤<br />
Ũ(z, Ũ<br />
(−1)<br />
2 (x 2 ), . . . , Ũ (−1)<br />
d<br />
(x d )) ≤ Ũ(z, 0, . . . , 0) = Ũ1(z) = 0.<br />
Therefore, ˜F is groun<strong>de</strong>d. L<strong>et</strong> a, b ∈ D with ak ≤ b k , k = 1, . . . , d and <strong>de</strong>note<br />
B := (a 1 , b 1 ] × · · · × (a d , b d ]<br />
and<br />
Since Ũ (−1)<br />
k<br />
˜B := [Ũ (−1)<br />
1 (b 1 ), Ũ (−1)<br />
1 (a 1 )) × · · · × [Ũ (−1)<br />
(b k ) ≤ Ũ (−1)<br />
k<br />
(a k ) for every k, formula (4.14) <strong>en</strong>tails that<br />
d<br />
(b d ), Ũ (−1)<br />
d<br />
(a d )).<br />
V F (B) = (−1) d VŨ( ˜B) = ˜ν( ˜B) ≥ 0,
150 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
which means that ˜F is a d-increasing. Equations (4.17) and (4.18) show that for every k,<br />
˜F (∞, . . . , ∞, x k , ∞, . . . , ∞) = x k , ∀x k ∈ Ran Ũk. Therefore, ˜F has uniform margins.<br />
2. The second stage is to ext<strong>en</strong>d ˜F to the function F <strong>de</strong>fined on [0, ∞] d . The ext<strong>en</strong>sion can<br />
be carried out step by step, constructing a sequ<strong>en</strong>ce of d + 1 groun<strong>de</strong>d d-increasing functions<br />
F 0 , . . . , F d with uniform margins such that F 0 ≡ ˜F , F d ≡ F ,<br />
Dom F k = [0, ∞] k × Ran Ũk+1 × · · · × Ran Ũd,<br />
and for each k = 1, . . . , d − 1, F k ≡ F k+1 on Dom F k . In other words, at each step, we ext<strong>en</strong>d<br />
˜F along one coordinate only. Since all d steps are performed in the same way, we need only to<br />
<strong>de</strong>scribe one of them. To simplify the notation and without loss of g<strong>en</strong>erality, we <strong>de</strong>scribe the<br />
first one, that is, we show how to ext<strong>en</strong>d ˜F to a function <strong>de</strong>fined on [0, ∞]×Ran Ũ2×· · ·×Ran Ũd.<br />
First, l<strong>et</strong> us ext<strong>en</strong>d ˜F by continuity to a function <strong>de</strong>fined on Ran Ũ1 ×Ran Ũ2 ×· · ·×Ran Ũd.<br />
Giv<strong>en</strong> a sequ<strong>en</strong>ce of real numbers {ξ i } ∞ i=1 such that ξ i ∈ Ran Ũ1 for all i and lim i ξ i /∈ Ran Ũ1,<br />
we <strong>de</strong>fine<br />
F (lim<br />
i<br />
ξ i , x 2 , . . . , x d ) := lim<br />
i<br />
F (ξ i , x 2 , . . . , x d ).<br />
Since ∞ ∈ Ran Ũ1, lim i ξ i is finite. Therefore, by Lemma 4.4, the limit in the right-hand si<strong>de</strong> of<br />
the above expression exists and is uniform in other coordinates so F is well-<strong>de</strong>fined. It is also<br />
clear that F is d-increasing, groun<strong>de</strong>d and has uniform margins.<br />
Now we can suppose that Ran Ũ1 is closed and ext<strong>en</strong>d ˜F using linear interpolation to a<br />
function <strong>de</strong>fined on ([0, λ 1 ] ∪ {∞}) × Ran Ũ2 × · · · × Ran Ũd where λ 1 = lim x↓0 Ũ 1 (x).<br />
any x ≤ λ 1 such that x /∈ Ran Ũ1, we introduce x := sup{ξ ∈ Ran Ũ1, ξ ≤ x}, ¯x := inf{ξ ∈<br />
Ran Ũ1, ξ ≥ x}. Since Ran Ũ1 is closed, it contains both x and ¯x. Define<br />
F (x, x 2 , . . . , x d ) := ˜F (x, x 2 , . . . , x d ) ¯x − x<br />
¯x − x + ˜F (¯x, x 2 , . . . , x d ) x − x<br />
¯x − x . (4.19)<br />
The function F is clearly groun<strong>de</strong>d and has uniform margins; we only need to prove that it<br />
is d-increasing. Fix a d-box B = |x 1 , y 1 | × · · · × |x d , y d | with vertices in the domain of F and<br />
<strong>de</strong>note ˜B = |x 2 , y 2 | × · · · × |x d , y d |.<br />
If both x 1 and y 1 belong to Ran Ũ1 th<strong>en</strong> all vertices of B are in Dom ˜F and V F (B) =<br />
V ˜F<br />
(B) ≥ 0.<br />
If x 1 /∈ Ran Ũ1, y 1 /∈ Ran Ũ1 and b<strong>et</strong>we<strong>en</strong> x 1 and y 1 there are no points that belong to<br />
For
4.4. LEVY COPULAS: SPECTRALLY POSITIVE CASE 151<br />
Ran Ũ1, th<strong>en</strong> a straightforward computation using Equation (4.19) shows that<br />
Suppose that x 1<br />
V F (B) = y 1 − x 1<br />
¯x 1 − x 1<br />
V ˜F<br />
(|x 1 , ¯x 1 | × ˜B) ≥ 0.<br />
/∈ Ran Ũ1 but y 1 ∈ Ran Ũ1. L<strong>et</strong> z = inf{ζ ≥ x 1 , ζ ∈ Ran Ũ1}. Because<br />
Ran Ũ1 is closed, z ∈ Ran Ũ1. The F -volume of B can be <strong>de</strong>composed as follows:<br />
V F (B) = V F (|x 1 , z| × ˜B) + V F (|z, y 1 | × ˜B).<br />
The second term is positive because all vertices of the corresponding d-box are in the domain<br />
of ˜F . The first term can again be computed using formula (4.19):<br />
V F (|x 1 , z| × ˜B) = z − x 1<br />
z − x 1<br />
V ˜F<br />
(|x 1 , z| × ˜B) ≥ 0.<br />
The case where x 1 ∈ Ran Ũ1 and y 1 /∈ Ran Ũ1 can be treated in this same way and if x 1 /∈ Ran Ũ1,<br />
y 1 /∈ Ran Ũ1 and b<strong>et</strong>we<strong>en</strong> x 1 and y 1 there are points that belong to Ran Ũ1, the interval |x 1 , y 1 |<br />
can be split onto two intervals of types that we have already discussed.<br />
We have thus ext<strong>en</strong><strong>de</strong>d ˜F to a function <strong>de</strong>fined on ([0, λ 1 ]∪{∞})×Ran Ũ2 ×· · ·×Ran Ũd. If<br />
λ 1 = ∞ th<strong>en</strong> we are done; otherwise we ext<strong>en</strong>d ˜F to [0, ∞] × Ran Ũ2 × · · · × Ran Ũd by <strong>de</strong>fining<br />
F (x 1 , . . . , x d ) := ˜F (g λ1 (x 1 ), x 2 , . . . , x d ) + (x 1 − λ 1 ) + 1 x2 =∞ . . . 1 xd =∞, (4.20)<br />
where<br />
⎧<br />
x, x ≤ λ 1<br />
⎪⎨<br />
g λ1 (x) := λ 1 , λ 1 < x < ∞<br />
⎪⎩<br />
∞, x = ∞.<br />
The function F , <strong>de</strong>fined by (4.20) is an increasing function because it is a sum of two increasing<br />
functions. The groun<strong>de</strong>dness and marginal properties can be verified by direct substitution.<br />
This compl<strong>et</strong>es the construction of the Lévy copula.<br />
To prove the uniqu<strong>en</strong>ess, assume that there exist two functions with required properties,<br />
i.e., we have<br />
F 1 (U 1 (x 1 ), . . . , U d (x d )) = F 2 (U 1 (x 1 ), . . . , U d (x d )), ∀x 1 , . . . , x d .<br />
For each vector (t 1 , . . . , t d ) ∈ Ran U 1 × · · · × Ran U d there exists a vector (x 1 , . . . , x d ) ∈ [0, ∞] d<br />
such that U 1 (x 1 ) = t 1 , . . . , U d (x d ) = t d . This means that for every (t 1 , . . . , t d ) ∈ Ran U 1 × · · · ×
152 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
Ran U d we have F 1 (t 1 , . . . , t d ) = F 2 (t 1 , . . . , t d ). The uniqu<strong>en</strong>ess statem<strong>en</strong>t now follows from<br />
Lemma 4.4.<br />
The converse statem<strong>en</strong>t. Since U 1 , . . . , U d are left-continuous (as tail integrals of Lévy<br />
measures), Lemma 4.4 <strong>en</strong>tails that U is left-continuous in each variable. Therefore, there exists<br />
a unique positive measure ν on B(R d +) such that for every right-op<strong>en</strong> left-closed interval I of<br />
R d +, ν(I) = (−1) d V U (I) (see Section 4.5 in [60]).<br />
It remains to prove that ∫ |x|≤1 |x|2 ν(dx) < ∞. L<strong>et</strong> us fix k ∈ {1 . . . d} and consi<strong>de</strong>r the<br />
measure ν ′ k <strong>de</strong>fined by ν ′ k (A) := ∫<br />
ν(dx)<br />
{x∈R d + :x k∈A}<br />
for A ∈ B((0, ∞)).<br />
By the uniqu<strong>en</strong>ess of the ext<strong>en</strong>sion this measure coinci<strong>de</strong>s with ν k because it is straightforward<br />
to check that the two measures coinci<strong>de</strong> on right-op<strong>en</strong> left-closed intervals of (0, ∞). Therefore<br />
∫<br />
|x| 2 ν(dx) =<br />
[0,1] d<br />
d∑<br />
∫<br />
d∑<br />
∫<br />
x 2 k ν(dx) ≤<br />
[0,1] d<br />
k=1<br />
k=1<br />
[0,1]<br />
x 2 k ν′ k (dx k) =<br />
d∑<br />
∫<br />
k=1<br />
[0,1]<br />
x 2 k ν k(dx k ).<br />
Since ν k for every k is by the theorem’s statem<strong>en</strong>t a Lévy measure, the right-hand si<strong>de</strong> of the<br />
above expression is finite, which shows that ν is in<strong>de</strong>ed a Lévy measure.<br />
4.5 Lévy copulas for g<strong>en</strong>eral Lévy processes<br />
This section discusses the notion of Lévy copula for g<strong>en</strong>eral Lévy processes, introduced in a<br />
joint work of the pres<strong>en</strong>t author with Jan Kalls<strong>en</strong> [59]. In the sequel, we will need a special<br />
interval associated with any x ∈ R:<br />
⎧<br />
⎨ [x, ∞), x ≥ 0,<br />
I(x) :=<br />
⎩<br />
(−∞, x), x < 0.<br />
(4.21)<br />
Similarly to Lévy processes with positive jumps, the Lévy measure of a g<strong>en</strong>eral Lévy process<br />
will be repres<strong>en</strong>ted by its tail integral.<br />
Definition 4.15. L<strong>et</strong> X be a R d -valued Lévy process with Lévy measure ν. The tail integral<br />
of ν is the function U : (R \ {0}) d → R <strong>de</strong>fined by<br />
⎛ ⎞<br />
d∏<br />
d∏<br />
U(x 1 , . . . , x d ) := ν ⎝ I(x j ) ⎠ sgn(x i ) (4.22)<br />
j=1 i=1
4.5. LEVY COPULAS: GENERAL CASE 153<br />
Note that the tail integral is <strong>de</strong>fined so that (−1) d U is d-increasing and left-continuous in<br />
each orthant as was the case for the tail integral of Lévy measure on R d +.<br />
Since the tail integral is only <strong>de</strong>fined on (R \ {0}) d , it does not <strong>de</strong>termine the Lévy measure<br />
uniquely (unless we know that the latter does not charge the coordinate axes). However, we<br />
will see from the following lemma that the Lévy measure is compl<strong>et</strong>ely <strong>de</strong>termined by its tail<br />
integral and all its marginal tail integrals (cf. Definition 4.13).<br />
Lemma 4.7. L<strong>et</strong> X be a R d -valued Lévy process. Its marginal tail integrals {U I : I ⊂<br />
{1, . . . , d} non-empty} are uniquely <strong>de</strong>termined by its Lévy measure ν. Conversely, its Lévy<br />
measure is uniquely <strong>de</strong>termined by the s<strong>et</strong> of its marginal tail integrals.<br />
An important differ<strong>en</strong>ce b<strong>et</strong>we<strong>en</strong> the spectrally positive case and the g<strong>en</strong>eral case is that in<br />
the spectrally positive case the Lévy measure is <strong>de</strong>termined by a single tail integral U, <strong>de</strong>fined<br />
on [0, ∞) d , whereas in the g<strong>en</strong>eral case the Lévy measure is <strong>de</strong>termined jointly by all marginal<br />
tail integrals, each one being <strong>de</strong>fined on (R \ {0}) I . In the spectrally positive case Equation<br />
4.15 shows that specifying the values of U wh<strong>en</strong> some of the argum<strong>en</strong>ts equal 0 is equival<strong>en</strong>t<br />
to specifying the marginal tail integrals. In principle, we could do the same in the g<strong>en</strong>eral case<br />
and <strong>de</strong>fine the tail integral on R d by Equation (4.22). However, due to a more complicated<br />
structure of margins of a Lévy copula in the g<strong>en</strong>eral case, with this <strong>de</strong>finition of the tail integral<br />
the repres<strong>en</strong>tation formula (4.16) does not hold on R d . Therefore, we keep the Definition 4.15<br />
and <strong>de</strong>scribe the Lévy measure using its tail integral, <strong>de</strong>fined on (R \ {0}) d and all its marginal<br />
tail integrals.<br />
Proof of Lemma 4.7. The fact that marginal tail integrals are uniquely <strong>de</strong>termined by the Lévy<br />
measure ν follows from Lemma 4.1.<br />
The converse statem<strong>en</strong>t.<br />
It is suffici<strong>en</strong>t to prove that ν([a, b)) is compl<strong>et</strong>ely <strong>de</strong>termined<br />
by the tail intergals for any a, b ∈ R d with a ≤ b and 0 /∈ [a, b). We prove by induction on<br />
k = 0, . . . , d that ν I ( ∏ i∈I [a i, b i )) is <strong>de</strong>termined by the tail integrals for any a, b ∈ R d such that<br />
a ≤ b and a i b i ≤ 0 for at most k indices and any non-empty I ⊂ {1, . . . , d} with 0 /∈ ∏ i∈I [a i, b i ).<br />
If k = 0, Definitions 4.15 and 4.13 <strong>en</strong>tail that<br />
ν I ( ∏<br />
i∈I[a i , b i )<br />
)<br />
= (−1) |I| V U I<br />
( ∏<br />
[a i , b i )<br />
i∈I<br />
)<br />
.
154 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
L<strong>et</strong> a, b ∈ R d such that a i b i ≤ 0 for at most k indices. For ease of notation we suppose that<br />
a i b i ≤ 0 for i = 1, . . . , k. L<strong>et</strong> I ⊂ {1, . . . , d} non-empty with 0 /∈ ∏ i∈I [a i, b i ). By induction<br />
hypothesis, ν I ( ∏ i∈I [a i, b i )) is uniquely <strong>de</strong>termined if k ∉ I. Suppose that k ∈ I. If b k = 0, th<strong>en</strong><br />
( ) ⎛<br />
⎞<br />
∏<br />
ν I i , b i ) = lim ν<br />
α↑0<br />
i∈I[a I ⎝ ∏<br />
[a i , b i ) × [a k , α) × ∏<br />
[a i , b i ) ⎠<br />
i∈I,ik<br />
and the right-hand si<strong>de</strong> is uniquely <strong>de</strong>termined by the induction hypothesis. If b k ≠ 0, th<strong>en</strong><br />
( )<br />
⎛<br />
⎞<br />
∏<br />
ν I i , b i ) = ν<br />
i∈I[a I\{k} ⎝ ∏<br />
[a i , b i ) ⎠<br />
which is uniquely <strong>de</strong>termined as well.<br />
i∈I\{k}<br />
⎛<br />
⎞<br />
− lim ν I ⎝ ∏<br />
[a i , b i ) × [b k , c) × ∏<br />
[a i , b i ) ⎠<br />
c↑∞<br />
i∈I,ik<br />
⎛<br />
⎞<br />
− lim<br />
α↑a k ;c↓−∞ νI ⎝ ∏<br />
[a i , b i ) × [c, a k ) × ∏<br />
[a i , b i ) ⎠ ,<br />
i∈I,ik<br />
Lévy copulas in the g<strong>en</strong>eral case are <strong>de</strong>fined similarly to the spectrally positive case.<br />
Definition 4.16. A function F : (−∞, ∞] d → (−∞, ∞] is a Lévy copula if<br />
1. F (u 1 , . . . , u d ) < ∞ for (u 1 , . . . , u d ) ≠ (∞, . . . , ∞),<br />
2. F (u 1 , . . . , u d ) = 0 if u i = 0 for at least one i ∈ {1, . . . , d},<br />
3. F is d-increasing,<br />
4. F i (u) = u for any i ∈ {1, . . . , d}, u ∈ (−∞, ∞].<br />
Remark 4.2. Since F is d-increasing, the sup in Equation (4.8) for the margins of F may be<br />
computed by taking b i = ∞ and a i → −∞ for every i ∈ I c . Therefore, Equation (4.8) reduces<br />
to<br />
F I ((x i ) i∈I ) := lim<br />
∑<br />
c→∞<br />
(x j ) j∈I c ∈{−c,∞} |Ic |<br />
F (x 1 , . . . , x d ) ∏<br />
j∈I c sgn x j . (4.23)<br />
Wh<strong>en</strong> F is a Lévy copula on [0, ∞] d (Definition 4.14), it can be ext<strong>en</strong><strong>de</strong>d to a Lévy copula F ext<br />
on (−∞, ∞] d by taking<br />
⎧<br />
⎪⎨ F (x 1 , . . . , x d ), (x 1 , . . . , x d ) ∈ [0, ∞] d<br />
F ext (x 1 , . . . , x d ) :=<br />
⎪⎩<br />
0 otherwise.
4.5. LEVY COPULAS: GENERAL CASE 155<br />
In the following, the term Lévy copula without specifying the domain refers to a Lévy copula<br />
on (−∞, ∞] d .<br />
Example 4.5. It is easy to check that the function<br />
F (u, v) := 1 uv<br />
2 1 + |u| + |v|<br />
<strong>de</strong>fines a Lévy copula on (−∞, ∞] 2 .<br />
In view of Lemma 4.7, the following theorem is analogous to Theorem 4.6 for Lévy measures<br />
on R d + and to Sklar’s theorem for probability measures.<br />
Theorem 4.8. L<strong>et</strong> ν be a Lévy measure on R d \ {0}. Th<strong>en</strong> there exists a Lévy copula F such<br />
that the tail integrals of ν satisfy:<br />
U I ((x i ) i∈I ) = F I ((U i (x i )) i∈I ) (4.24)<br />
for any non-empty I ⊂ {1, . . . , d} and any (x i ) i∈I ∈ (R \ {0}) I . The Lévy copula F is unique<br />
on ∏ d<br />
i=1 Ran U i.<br />
Conversely, if F is a d-dim<strong>en</strong>sional Lévy copula and ν 1 , . . . , ν d are Lévy measures on R\{0}<br />
with tail integrals U i , i = 1, . . . , d th<strong>en</strong> there exists a unique Lévy measure on R d \ {0} with onedim<strong>en</strong>sional<br />
marginal tail integrals U 1 , . . . , U d and whose marginal tail integrals satisfy Equation<br />
(4.24) for any non-empty I ⊂ {1, . . . , d} and any (x i ) i∈I ∈ (R \ {0}) I .<br />
Remark 4.3. In particular, the Lévy copula F is unique if for each k, the marginal Lévy measure<br />
ν k has no atoms and both ν k ((−∞, 0)) = ∞ and ν k ((0, ∞)) = ∞, because in this case Ran U k =<br />
[−∞, ∞] for each k.<br />
Definition 4.17. For a Lévy process X on R d with characteristic tripl<strong>et</strong> (A, ν, γ), any Lévy<br />
copula as in statem<strong>en</strong>t of Theorem 4.8 is called the Lévy copula of X.<br />
Proof of Theorem 4.8. First part. D<strong>en</strong>ote the marginal Lévy measures of ν by ν 1 , . . . , ν d . For<br />
the purposes of this proof we s<strong>et</strong> for x ∈ (−∞, ∞], i = 1, . . . , d,<br />
⎧<br />
U ⎪⎨ i (x) for x ≠ 0 and x ≠ ∞,<br />
Ũ i (x) := 0 for x = ∞,<br />
⎪⎩<br />
∞ for x = 0
156 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
and<br />
⎧<br />
⎨ lim ξ↓x U i (ξ) − U i (x) for x ≠ 0 and x ≠ ∞,<br />
∆U i (x) :=<br />
⎩<br />
0 for x = ∞ or x = 0.<br />
L<strong>et</strong> m be the measure on ((−∞, ∞] d \ {0}) × [0, 1] d × R <strong>de</strong>fined by<br />
m := ˜ν ⊗ λ| (0,1) d ⊗ δ 0 +<br />
d∑<br />
i=1<br />
δ (0,...,0<br />
,∞,0,...,0) ⊗ δ (0,...,0 ) ⊗ λ| (νi ((0,∞)),∞)∪(−∞,−ν<br />
}{{}<br />
}{{}<br />
i ((−∞,0))),<br />
i−1<br />
d<br />
where ˜ν is the ext<strong>en</strong>sion of ν to (−∞, ∞] d \ {0}, i.e. ˜ν(B) := ν(B ∩ R d ). L<strong>et</strong><br />
g i : (−∞, ∞] × [0, 1] × R → (−∞, ∞],<br />
(x, y, z) ↦→ Ũi(x) + y∆U i (x) + z<br />
and <strong>de</strong>fine a measure ˜m on (−∞, ∞] d \ {∞, . . . , ∞} via<br />
˜m(B) := m(˜g −1 (B))<br />
with<br />
˜g(x 1 , . . . , x d , y 1 , . . . , y d , z) := (g 1 (x 1 , y 1 , z), . . . , g d (x d , y d , z)).<br />
Finally, l<strong>et</strong> F be giv<strong>en</strong> by<br />
⎧ ( d∏<br />
) d∏<br />
⎪⎨ ˜m (u i ∧ 0, u i ∨ 0] sgn u i , (u 1 , . . . , u d ) ∈ (−∞, ∞] d \ (∞, . . . , ∞)<br />
F (u 1 , . . . , u d ) := i=1<br />
i=1<br />
⎪⎩ ∞, (u 1 , . . . , u d ) = (∞, . . . , ∞).<br />
Properties 1 and 2 in Definition 4.16 are obvious. From the fact that ˜m is a positive measure<br />
it follows immediately that F is d-increasing. L<strong>et</strong> I ⊂ {1, . . . , d} nonempty and (u i ) i∈I ∈<br />
(−∞, ∞] I . For ease of notation, we consi<strong>de</strong>r only the case of non-negative u i . The g<strong>en</strong>eral case<br />
follows analogously. By <strong>de</strong>finition of F we have<br />
∑<br />
F I ((u i ) i∈I ) = lim<br />
F (u 1 , . . . , u d ) ∏<br />
sgn u j<br />
c→∞<br />
(u j ) j∈I c ∈{−c,∞} Ic j∈I c<br />
( )<br />
∏<br />
u i ] × (−∞, ∞]<br />
i∈I(0, Ic<br />
= ˜m<br />
= m( {<br />
(x 1 , . . . , x d , y 1 , . . . , y d , z) ∈ ((−∞, ∞] d \ {0}) × [0, 1] d × R :<br />
Ũ i (x i ) + y i ∆U i (x i ) + z ∈ (0, u i ] for i ∈ I} ) .
4.5. LEVY COPULAS: GENERAL CASE 157<br />
If I = {i}, th<strong>en</strong> the <strong>de</strong>finition of m implies that this equals<br />
(<br />
νi ⊗ λ| (0,1)<br />
) (<br />
{(x, y) ∈ R × [0, 1] : Ũ i (x) + y∆U i (x) ∈ (0, u i ]} ) + (u i − ν i ((0, ∞)))1 {ui >ν i ((0,∞))}.<br />
Introducing x ∗ := inf{x ≥ 0 : Ũi(x) + ∆U i (x) ≤ u i }, this can be expressed as<br />
ν i ((x ∗ , ∞)) + (u i − Ũi(x ∗ ) − ∆U i (x ∗ ))1 {x∗≠0} + (u i − ν i ((0, ∞)))1 {x ∗ =0} = u i ,<br />
i.e. property 4 in Definition 4.16 is m<strong>et</strong>.<br />
Now, l<strong>et</strong> (x i ) i∈I ∈ (R \ {0}) I . Again, we consi<strong>de</strong>r only the case where all the x i are nonnegative.<br />
Th<strong>en</strong><br />
F I ((U i (x i )) i∈I ) = m( {<br />
(˜x 1 , . . . , ˜x d , y 1 , . . . , y d , z) ∈ (−∞, ∞] d × [0, 1] d × R :<br />
= ν<br />
} )<br />
Ũ i (˜x i ) + y i ∆U i (˜x i ) + z ∈ (0, U i (x i )] for i ∈ I<br />
( ∏<br />
i∈I[x i , ∞) × R Ic )<br />
= ν I ( ∏<br />
i∈I[x i , ∞)<br />
= U I ((x i ) i∈I )<br />
as claimed. The uniqu<strong>en</strong>ess statem<strong>en</strong>t follows from (4.24) and Lemma 4.4.<br />
The converse statem<strong>en</strong>t.<br />
)<br />
Since F is d-increasing and continuous (by Lemma 4.4), there<br />
exists a unique measure µ on (−∞, ∞] d \ {∞, . . . , ∞} such that V F (|a, b|) = µ((a, b]) for any<br />
a, b ∈ (−∞, ∞] d \ {∞, . . . , ∞} with a ≤ b. (see [60], Section 4.5). For a one-dim<strong>en</strong>sional tail<br />
integral U(x), we <strong>de</strong>fine<br />
⎧<br />
⎨<br />
U (−1) sup{x > 0 : U(x) ≥ u} ∨ 0, u ≥ 0<br />
(u) :=<br />
⎩<br />
sup{x < 0 : U(x) ≥ u}, u < 0.<br />
L<strong>et</strong> ˜ν := f(µ) be the image of µ un<strong>de</strong>r<br />
f : (u 1 , . . . , u d ) ↦→ (U (−1)<br />
1 (u 1 ), . . . , U (−1)<br />
d<br />
(u d ))<br />
(4.25)<br />
and l<strong>et</strong> ν be the restriction of ˜ν to R d \ {0}. We need to prove that ν is a Lévy measure and<br />
that its marginal tail integrals U I ν satisfy<br />
U I ν ((x i ) i∈I ) = F I ((U i (x i )) i∈I )
158 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
for any non-empty I ⊂ {1, . . . , d} and any (x i ) i∈I ∈ (R \ {0}) I . Suppose for ease of notation<br />
that x i > 0, i ∈ I. Th<strong>en</strong><br />
U I ν ((x i ) i∈I ) = ν({ξ ∈ R d : ξ i ∈ [x i , ∞), i ∈ I})<br />
= µ({u ∈ (−∞, ∞] d : U (−1)<br />
i<br />
(u i ) ∈ [x i , ∞), i ∈ I})<br />
= µ({u ∈ (−∞, ∞] d : 0 < u i ≤ U(x i ), i ∈ I}).<br />
= F I ((U i (x i )) i∈I ).<br />
This proves in particular that the one-dim<strong>en</strong>sional marginal tail integrals of ν equal U 1 , . . . , U d .<br />
Since the marginals ν i of ν are Lévy measures on R, we have ∫ (x 2 i ∧ 1)ν i(dx i ) < ∞ for<br />
i = 1, . . . , d. This implies<br />
∫<br />
∫<br />
(|x| 2 ∧ 1)ν(dx) ≤<br />
d∑<br />
d∑<br />
∫<br />
(x 2 i ∧ 1)ν(dx)<br />
i=1<br />
i=1<br />
(x 2 i ∧ 1)ν i (dx i ) < ∞<br />
and h<strong>en</strong>ce ν is a Lévy measure on R d . The uniqu<strong>en</strong>ess of ν follows from the fact that it is<br />
uniquely <strong>de</strong>termined by its marginal tail integrals (cf. Lemma 4.7).<br />
4.6 Examples of Lévy copulas<br />
In this section we <strong>de</strong>rive the form of Lévy copulas corresponding to special <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures<br />
of Lévy processes: in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce, compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce and the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of stable<br />
processes. Examples of param<strong>et</strong>ric families of Lévy copulas will be giv<strong>en</strong> in the next chapter.<br />
To characterize in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce of compon<strong>en</strong>ts of a multidim<strong>en</strong>sional Lévy process in terms of its<br />
Lévy copula, we need to restate Lemma 4.2 in terms of tail integrals.<br />
Lemma 4.9. The compon<strong>en</strong>ts X 1 , . . . , X d of an R d -valued Lévy process X are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt if<br />
and only if their continuous martingale parts are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt and the tail integrals of the Lévy<br />
measure satisfy U I ((x i ) i∈I ) = 0 for all I ⊂ {1, . . . , d} with card I ≥ 2 and all (x i ) i∈I ∈ (R\{0}) I .<br />
Proof. The “only if” part. L<strong>et</strong> I ⊂ {1, . . . , d} with card I ≥ 2 and (x i ) i∈I ∈ (R \ {0}) I . Th<strong>en</strong><br />
the compon<strong>en</strong>ts of the Lévy process (X i ) i∈I are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt as well. Applying Lemma 4.2 to<br />
this process, we conclu<strong>de</strong>, using Equation (4.2), that U I ((x i ) i∈I ) = 0.<br />
The “if” part. L<strong>et</strong> ν be <strong>de</strong>fined by Equation (4.2), where ν i is the Lévy measure of X i for<br />
i = 1, . . . , d. Th<strong>en</strong> all marginal tail integrals of ν coinci<strong>de</strong> with those of the Lévy measure of
4.6. EXAMPLES OF LEVY COPULAS 159<br />
X. Therefore, ν is the Lévy measure of X (cf. Lemma 4.7), which <strong>en</strong>tails by Lemma 4.2 that<br />
X 1 , . . . , X d are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt.<br />
Theorem 4.10. The compon<strong>en</strong>ts X 1 , . . . , X d of an R d -valued Lévy process X are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt<br />
if and only if their Brownian motion parts are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt and X has a Lévy copula of the<br />
form<br />
F ⊥ (x 1 , . . . , x d ) :=<br />
d∑ ∏<br />
x i 1 {∞} (x j ) (4.26)<br />
i=1 j≠i<br />
Proof. It is straightforward to see that Equation (4.26) <strong>de</strong>fines a Lévy copula.<br />
The “if” part. L<strong>et</strong> I ⊂ {1, . . . , d} with card I ≥ 2. Equation (4.23) <strong>en</strong>tails that F⊥ I ((u i) i∈I ) =<br />
0 for all (u i ) i∈I ∈ R I . Therefore, the tail integrals of X satisfy U I ((x i ) i∈I ) = 0 for all (x i ) i∈I ∈<br />
(R \ {0}) I by (4.24). From Lemma 4.9 we conclu<strong>de</strong> that X 1 , . . . , X d are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt.<br />
The “only if” part. By Lemma 4.9, the tail integrals of X satisfy U I ((x i ) i∈I ) = 0 for all<br />
(x i ) i∈I ∈ (R \ {0}) I and all I ⊂ {1, . . . , d} with card I ≥ 2. Since also F⊥ I ((u i) i∈I ) = 0, we<br />
conclu<strong>de</strong> that F ⊥ is a Lévy copula for X.<br />
Observing that F ⊥ | [0,∞] d<br />
following easy corollary.<br />
is a Lévy copula in the s<strong>en</strong>se of Definition 4.14, we obtain the<br />
Corollary 4.1. The compon<strong>en</strong>ts X 1 , . . . , X d of an R d -valued spectrally positive Lévy process X<br />
are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt if and only if their Brownian motion parts are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt and X has a Lévy<br />
copula on [0, ∞] d of the form F ⊥ | [0,∞] d, where F ⊥ is <strong>de</strong>fined by (4.26).<br />
The following theorem <strong>de</strong>scribes compl<strong>et</strong>e jump <strong>de</strong>p<strong>en</strong><strong>de</strong>nce in terms of Lévy copulas.<br />
Theorem 4.11. L<strong>et</strong> X be a R d -valued Lévy process whose Lévy measure is supported by an<br />
or<strong>de</strong>red s<strong>et</strong> S ⊂ K, where K is as in Equation (4.3). Th<strong>en</strong> the compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce Lévy<br />
copula giv<strong>en</strong> by<br />
d∏<br />
F ‖ (x 1 , . . . , x d ) := min(|x 1 |, . . . , |x d |)1 K (x 1 , . . . , x d ) sgn x i (4.27)<br />
is a Lévy copula of X.<br />
Conversely, if F ‖ is a Lévy copula of X, th<strong>en</strong> the Lévy measure of X is supported by an<br />
or<strong>de</strong>red subs<strong>et</strong> of K. If, in addition, the tail integrals U i of X i are continuous and satisfy<br />
lim x→0 U i (x) = ∞, i = 1, . . . , d, th<strong>en</strong> the jumps of X are compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt.<br />
i=1
160 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
The proof is based on the following repres<strong>en</strong>tation of an or<strong>de</strong>red s<strong>et</strong> as a union of a strictly<br />
or<strong>de</strong>red s<strong>et</strong> and countable many segm<strong>en</strong>ts that are perp<strong>en</strong>dicular to some coordinate axis.<br />
Lemma 4.12. L<strong>et</strong> S ⊂ R d be an or<strong>de</strong>red s<strong>et</strong>. It can be writt<strong>en</strong> as<br />
∞⋃<br />
S = S ∗ ∪ S n , (4.28)<br />
n=1<br />
where S ∗ ⊂ R d is strictly or<strong>de</strong>red and for every n, S n ⊂ R d and there exist k(n) and ξ(n) such<br />
that x k(n) = ξ(n) for all x ∈ S n .<br />
Proof. For the purposes of this proof we <strong>de</strong>fine the l<strong>en</strong>gth of an or<strong>de</strong>red s<strong>et</strong> S ′ by |S ′ | :=<br />
∑<br />
sup d<br />
a,b∈S ′ i=1 (a i − b i ). L<strong>et</strong><br />
S(ξ, k) = {x ∈ R d : x k = ξ} ∩ S. (4.29)<br />
First, we want to prove that there is at most a countable number of such segm<strong>en</strong>ts with nonzero<br />
l<strong>en</strong>gth. Consi<strong>de</strong>r N differ<strong>en</strong>t segm<strong>en</strong>ts of this type (S i := S(ξ i , k i )) N i=1 with k i = k and<br />
|S i | ≥ ε > 0 for all i. Since S i are differ<strong>en</strong>t, ξ i must all be differ<strong>en</strong>t and we can suppose without<br />
loss of g<strong>en</strong>erality that ξ i < ξ i+1 for all i. Th<strong>en</strong> x i ≤ x i+1 for all i, where x i and x i are the upper<br />
and the lower bounds of S i . Since all S i are subs<strong>et</strong>s of S, which is an or<strong>de</strong>red s<strong>et</strong>, this implies<br />
that | ⋃ N<br />
i=1 S i| ≥ Nε. Therefore, for all A > 0 and for all ε > 0, the s<strong>et</strong> [−A, A] d contains a<br />
finite number of segm<strong>en</strong>ts of type (4.29) with l<strong>en</strong>gth greater or equal to ε. This means that<br />
there is at most a countable number of segm<strong>en</strong>ts of non-zero l<strong>en</strong>gth, and one can <strong>en</strong>umerate<br />
them in a sequ<strong>en</strong>ce {S n } ∞ n=1 with S n := S(ξ(n), k(n)).<br />
Now l<strong>et</strong> S ∗ = S \ ⋃ ∞<br />
n=1 S n. S ∗ is or<strong>de</strong>red because it is a subs<strong>et</strong> of S. L<strong>et</strong> x, y ∈ S ∗ . If<br />
x k = y k for some k th<strong>en</strong> either x and y are the same or they are in some segm<strong>en</strong>t of type (4.29)<br />
h<strong>en</strong>ce not in S ∗ . Therefore, either x k < y k for every k or x k > y k for every k, which <strong>en</strong>tails<br />
that S ∗ is strictly or<strong>de</strong>red and we have obtained the <strong>de</strong>sired repres<strong>en</strong>tation for S.<br />
Proof of Theorem 4.11. We start by proving that F ‖ is in<strong>de</strong>ed a Lévy copula in the s<strong>en</strong>se of<br />
Definition 4.16. Properties 1 and 2 are obvious. To show property 3, introduce a positive<br />
measure µ on ¯R d by<br />
µ(B) = λ({x ∈ R : (x, . . . , x) ∈ B}), B ∈ B(¯R d ),<br />
} {{ }<br />
d times
4.6. EXAMPLES OF LEVY COPULAS 161<br />
where λ <strong>de</strong>notes the Lebesgue measure on R. Th<strong>en</strong> V F‖ ((a, b]) = µ((a, b]) for any a ≤ b, and<br />
therefore F ‖ is d-increasing. The margins of F have the same form as F , namely<br />
F‖ I ((x i) i∈I ) = min |x i|1 {(−1,...,−1),(1,...,1)} ((sgn x i ) i∈I ) ∏ sgn x i . (4.30)<br />
i∈I<br />
i∈I<br />
Therefore, the one-dim<strong>en</strong>sional margins satisfy F {i} (u) = u.<br />
The first part. L<strong>et</strong> x ∈ (0, ∞) d . Clearly, U(x) ≤ U k (x k ) for any k. On the other hand, since<br />
S is an or<strong>de</strong>red s<strong>et</strong>, we have<br />
{y ∈ R d : x k ≤ y k } ∩ S = {y ∈ R d : x ≤ y} ∩ S<br />
for some k. In<strong>de</strong>ed, suppose that this is not so. Th<strong>en</strong> there exist points z 1 , . . . , z d ∈ S and<br />
indices j 1 , . . . , j d such that zk k ≥ x k and zj k k<br />
< x jk for k = 1, . . . , d. Choose the greatest elem<strong>en</strong>t<br />
among z 1 , . . . , z d (this is possible because they all belong to an or<strong>de</strong>red s<strong>et</strong>) and call it z k .<br />
Th<strong>en</strong> z k j k<br />
< x jk . However, by construction of z 1 , . . . , z d we also have z j k<br />
jk<br />
contradiction to the fact that z k is the greatest elem<strong>en</strong>t. Therefore,<br />
U(x) = min(U 1 (x 1 ), . . . , U d (x d )).<br />
≥ x jk , which is a<br />
Similarly, it can be shown that for every x ∈ (−∞, 0) d ,<br />
U(x) = (−1) d min(|U 1 (x 1 )|, . . . , |U d (x d )|).<br />
Since U(x) = 0 for any x /∈ K, we have shown that<br />
U(x) = F ‖ (U 1 (x 1 ), . . . , U d (x d ))<br />
for any x ∈ (R \ {0}) d . Since the marginal Lévy measures of X are also supported by or<strong>de</strong>red<br />
s<strong>et</strong>s and the margins of F ‖ have the same form as F ‖ , we have<br />
U I ((x i ) i∈I ) = F I ‖ ((U i(x i )) i∈I ) (4.31)<br />
for any I ⊂ {1, . . . , d} and any (x i ) i∈I ∈ (R \ {0}) I .<br />
The converse statem<strong>en</strong>t. L<strong>et</strong> S := supp ν. L<strong>et</strong> us first show that S ⊆ K. Suppose that<br />
this is not so. Th<strong>en</strong> there exists x ∈ S such that for some m and n, x m < 0 and x n > 0 and<br />
for every neighborhood N of x, ν(N) > 0. This implies that U {m,n} (x m /2, x n /2) > 0, which<br />
contradicts Equation (4.31).
162 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
Suppose now that S is not an or<strong>de</strong>red s<strong>et</strong>.<br />
Th<strong>en</strong> there exist two points u, v ∈ S such<br />
that u m > v m and u n < v n for some m and n. Moreover, either u i ≥ 0 and v i ≥ 0 for all<br />
i or u i ≤ 0 and v i ≤ 0 for all i. Suppose that u i ≥ 0 and v i ≥ 0, the other case being<br />
analogous. L<strong>et</strong> x = u+v<br />
2 . Since u, v ∈ S, we have ν({z ∈ Rd : z m < x m , z n ≥ x n }) > 0 and<br />
ν({z ∈ R d : z m ≥ x m , z n < x n }) > 0. However<br />
ν({z ∈ R d : z m < x m , z n ≥ x n }) = U n (x n ) − U {m,n} (x m , x n )<br />
= U n (x n ) − min(U m (x m ), U n (x n ))<br />
and<br />
ν({z ∈ R d : z m ≥ x m , z n < x n }) = U m (x m ) − min(U m (x m ), U n (x n )),<br />
which is a contradiction because these expressions cannot be simultaneously positive.<br />
For the last assertion, we assume that the tail integrals U i of X i are continuous and satisfy<br />
lim x→0 U i (x) = ∞, i = 1, . . . , d. It suffices to show that ν(S n ) = 0 for any n in <strong>de</strong>composition<br />
(4.28). If ξ(n) ≠ 0, th<strong>en</strong><br />
ν(S n ) = lim<br />
ε↓0<br />
(U k(n) (ξ(n) − ε) − U k(n) (ξ(n))) = 0,<br />
because U k(n) is continuous. Suppose now that ξ(n) = 0. Since S n does not reduce to a single<br />
point, we must have either x m > 0 or x m < 0 for some x ∈ S n and some m. Suppose that<br />
x m > 0, the other case being analogous. Since S is or<strong>de</strong>red, we have<br />
ν({x ∈ R d : x k(n) ≥ ε} ∩ S) ≤ ν({ξ ∈ R d : ξ m ≥ x m } ∩ S) < ∞<br />
uniformly in ε > 0. This implies lim x↓0 U k(n) (x) < ∞ in contradiction to lim x→0 U k(n) (x) = ∞.<br />
H<strong>en</strong>ce, ξ(n) > 0 for any n. Therefore, ν(R d \ S ∗ ) = 0 and the proof is compl<strong>et</strong>ed.<br />
A characterization of compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of spectrally positive Lévy processes can be<br />
obtained as a corollary of Theorem 4.11.<br />
Corollary 4.2. L<strong>et</strong> X be a R d -valued spectrally positive Lévy process whose Lévy measure is<br />
supported by an or<strong>de</strong>red s<strong>et</strong> S ⊂ R d +. Th<strong>en</strong><br />
F ‖ (x 1 , . . . , x d )| [0,∞] d ≡ min(x 1 , . . . , x d )<br />
is a Lévy copula of X.
4.6. EXAMPLES OF LEVY COPULAS 163<br />
Conversely, if F ‖ | [0,∞] d is a Lévy copula of a spectrally positive Lévy process X, th<strong>en</strong> the<br />
Lévy measure of X is supported by an or<strong>de</strong>red subs<strong>et</strong> of R d +. If, in addition, the tail integrals<br />
U i of X i are continuous and satisfy lim x↓0 U i (x) = ∞, i = 1, . . . , d, th<strong>en</strong> the jumps of X are<br />
compl<strong>et</strong>ely <strong>de</strong>p<strong>en</strong><strong>de</strong>nt.<br />
Lévy copulas provi<strong>de</strong> a simple characterization of possible <strong>de</strong>p<strong>en</strong><strong>de</strong>nce patterns of multidim<strong>en</strong>sional<br />
stable processes.<br />
Theorem 4.13. L<strong>et</strong> X := (X 1 , . . . , X d ) be a Lévy process on R d and l<strong>et</strong> α ∈ (0, 2). X is<br />
α-stable if and only if its compon<strong>en</strong>ts X 1 , . . . , X d are α-stable and it has a Lévy copula F that<br />
is a homog<strong>en</strong>eous function of or<strong>de</strong>r 1:<br />
∀r > 0, ∀u 1 , . . . , u d , F (ru 1 , . . . , ru d ) = rF (u 1 , . . . , u d ). (4.32)<br />
Proof. The “only if” part. L<strong>et</strong> X be α-stable. For each i = 1, . . . , d, three situations are<br />
possible: Ran U i = (−∞, 0] (only negative jumps), Ran U i = [0, ∞) (only positive jumps) or<br />
Ran U i = (−∞, 0) ∪ (0, ∞) (jumps of both signs). We exclu<strong>de</strong> the trivial case of a compon<strong>en</strong>t<br />
having no jumps at all. L<strong>et</strong> I 1 = {i : Ran U i = (−∞, 0]} and I 2 = {i : Ran U i = [0, ∞)} and<br />
for each i, l<strong>et</strong> ¯X i be a copy of X i , in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt from X and from ¯X k for k ≠ i. Define a Lévy<br />
process ˜X on R d by<br />
⎧<br />
⎨ X i , i /∈ I 1 ∪ I 2 ,<br />
˜X i =<br />
⎩<br />
X i − ¯X i , i ∈ I 1 ∪ I 2 .<br />
L<strong>et</strong> ˜ν be the Lévy measure of ˜X, Ũ be its tail integral and ˜F be its Lévy copula (it exists by<br />
Theorem 4.8). The process ˜X is clearly α-stable and each compon<strong>en</strong>t of this process has jumps<br />
of both signs (Ran Ũi = R \ {0}). By Theorem 14.3 in [87], for every B ∈ B(R d \ {0}) and for<br />
every r > 0,<br />
˜ν(B) = r α˜ν(rB). (4.33)<br />
Therefore, for every I ⊂ {1, . . . , d} nonempty and for every (x i ) i∈I ∈ (R \ {0}) |I| ,<br />
Ũ I ((x i ) i∈I ) = r α Ũ I ((rx i ) i∈I ). (4.34)<br />
By Theorem 4.8 this implies that for all (u 1 , . . . , u d ) ∈ (R \ {0}) d ,<br />
˜F I ((u i ) i∈I ) = r −1 ˜F I ((ru i ) i∈I ),
164 CHAPTER 4. DEPENDENCE OF LEVY PROCESSES<br />
and therefore (4.32) holds for ˜F . However, ˜F is also the copula of X. In<strong>de</strong>ed, l<strong>et</strong> I ⊂ {1, . . . , d}<br />
nonempty and (x i ) i∈I ∈ (R \ {0}) |I| . Two situations are possible:<br />
• For every i ∈ I, Ũi(x i ) = U(x i ). Th<strong>en</strong> it is easy to see that Equation (4.24) holds with F<br />
replaced by ˜F .<br />
• For some k ∈ I, U k (x k ) = 0. Th<strong>en</strong> ˜F I ((U i (x i )) i∈I ) = 0, but on the other hand<br />
|U I ((x i ) i∈I )| ≤ |U k (x k )| = 0, and (4.24) also holds.<br />
The “if” part. L<strong>et</strong> X have α-stable margins and a homog<strong>en</strong>eous Lévy copula. Th<strong>en</strong> the<br />
marginal tail integrals of X satisfy (4.34), and since by Lemma 4.7, the Lévy measure of every<br />
s<strong>et</strong> of the form [a, b) can be expressed as a linear combination of tail integrals, the Lévy measure<br />
of X has the property (4.33) and we conclu<strong>de</strong> by Theorem 14.3 in [87] that X is α-stable.
Chapter 5<br />
Applications of Lévy copulas<br />
To apply Lévy copulas to multidim<strong>en</strong>sional financial problems with <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> ass<strong>et</strong>s,<br />
three kinds of tools are required:<br />
1. Param<strong>et</strong>ric families of Lévy copulas. Parsimonious mo<strong>de</strong>ls are nee<strong>de</strong>d because one typically<br />
does not have <strong>en</strong>ough information about the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce to estimate many param<strong>et</strong>ers<br />
or proceed with a non-param<strong>et</strong>ric approach.<br />
2. Algorithms allowing to compute various quantities within a Lévy copula mo<strong>de</strong>l (e.g.,<br />
option prices, risk measures <strong>et</strong>c.)<br />
3. Estimation m<strong>et</strong>hods for Lévy copula mo<strong>de</strong>ls.<br />
In this chapter we give an answer to the first two questions. Section 5.1 <strong>de</strong>scribes several<br />
m<strong>et</strong>hods to construct param<strong>et</strong>ric families of Lévy copulas and gives examples of such families. In<br />
Section 5.2 we show how Lévy copulas can be used to simulate multidim<strong>en</strong>sional Lévy processes<br />
with <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> compon<strong>en</strong>ts. This simulation algorithm <strong>en</strong>ables us to compute the<br />
quantities of interest using the Monte Carlo m<strong>et</strong>hod. Estimation m<strong>et</strong>hods for Lévy copulas are<br />
the topic of our curr<strong>en</strong>t research and we do not discuss them here.<br />
A fundam<strong>en</strong>tal advantage of the Lévy copula approach compared to ordinary copulas is the<br />
possibility to work with several time scales at the same time. Wh<strong>en</strong> the time scale is fixed,<br />
the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure of r<strong>et</strong>urns can be <strong>de</strong>scribed with an ordinary copula. However, on a<br />
differ<strong>en</strong>t time scale the copula will not be the same (cf. Example 4.1). On the other hand, a<br />
165
166 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
Lévy copula of a Lévy process is not linked to any giv<strong>en</strong> time scale; it <strong>de</strong>scribes the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
structure of the <strong>en</strong>tire process.<br />
One example of a financial mo<strong>de</strong>lling problem where Lévy copulas naturally appear is the<br />
pricing of multi-ass<strong>et</strong> options on un<strong>de</strong>rlyings, <strong>de</strong>scribed by expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls. In this<br />
s<strong>et</strong>ting the param<strong>et</strong>ers of the marginal Lévy processes can be calibrated from the prices of European<br />
options, quoted at the mark<strong>et</strong>, and the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure will typically be estimated<br />
from the historical time series of r<strong>et</strong>urns. Since the sampling rate of r<strong>et</strong>urns is differ<strong>en</strong>t from<br />
the maturity of tra<strong>de</strong>d options as well as from the maturity of the bask<strong>et</strong> option that one wants<br />
to price, ordinary copulas are not well suited for this problem. Pricing of bask<strong>et</strong> options in a<br />
Lévy copula mo<strong>de</strong>l is discussed in more <strong>de</strong>tail in Section 5.3.<br />
Lévy copulas can also be useful outsi<strong>de</strong> the realm of financial mo<strong>de</strong>lling. Other contexts<br />
where mo<strong>de</strong>lling <strong>de</strong>p<strong>en</strong><strong>de</strong>nce in jumps is required are portfolios of insurance claims and mo<strong>de</strong>ls<br />
of operational risk.<br />
Consi<strong>de</strong>r an insurance company with two subsidiaries, in France and in Germany. The<br />
aggregate loss process of the Fr<strong>en</strong>ch subsidiary is mo<strong>de</strong>lled by the subordinator {X t } t≥0 and<br />
the loss process of the German one is {Y t } t≥0 . The nature of processes X and Y may be<br />
differ<strong>en</strong>t because the subsidiaries may not be working in the same sector and many risks that<br />
cause losses are local. However, common risks like floods and pan-European windstorms will<br />
lead to a certain <strong>de</strong>gree of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> the claims. In this s<strong>et</strong>ting it is conv<strong>en</strong>i<strong>en</strong>t<br />
to mo<strong>de</strong>l the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> X and Y using a Lévy copula on [0, ∞] 2 . In this mo<strong>de</strong>lling<br />
approach, the two-dim<strong>en</strong>sional Lévy measure of (X, Y ) is known and the overall loss distribution<br />
and ruin probability can be computed.<br />
Another example where jump processes naturally appear is giv<strong>en</strong> by mo<strong>de</strong>ls of operational<br />
risk. The 2001 Basel agreem<strong>en</strong>t <strong>de</strong>fines the operational risk as “the risk of direct and indirect<br />
loss resulting from ina<strong>de</strong>quate or failed internal processes, people and systems or from external<br />
ev<strong>en</strong>ts” and allows banks to use internal loss data to compute regulatory capital requirem<strong>en</strong>ts.<br />
Taking into account the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> differ<strong>en</strong>t business lines in this computation, due to<br />
a diversification effect, may lead to substantial reduction of regulatory capital [14]. Aggregate<br />
loss processes from differ<strong>en</strong>t business lines can be dynamically mo<strong>de</strong>lled by subordinators and<br />
the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> them can be accounted for using a Lévy copula on [0, ∞] 2 .
5.1. PARAMETRIC FAMILIES 167<br />
The applications of Lévy copulas are not limited to constructing expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls.<br />
Lévy copula mo<strong>de</strong>ls can be time changed to obtain multidim<strong>en</strong>sional analogs of stochastic<br />
volatility mo<strong>de</strong>ls discussed in [22]. More g<strong>en</strong>erally, since a large class of Markov processes or<br />
ev<strong>en</strong> semimartingales behaves locally as a Lévy process in the s<strong>en</strong>se that its dynamics can be<br />
<strong>de</strong>scribed by a drift rate, a covariance matrix, and a Lévy measure, which may all change<br />
randomly through time (cf. e.g. [54], II.2.9, II.4.19), Lévy copulas could be used to <strong>de</strong>scribe<br />
<strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> processes of these types.<br />
5.1 Param<strong>et</strong>ric families of Lévy copulas<br />
Our first result is a m<strong>et</strong>hod to construct Lévy copulas on [0, ∞] d from ordinary copulas.<br />
Theorem 5.1 (Construction of Lévy copulas from ordinary copulas). L<strong>et</strong> C be a copula<br />
on [0, 1] d and φ : [0, 1] → [0, ∞] be a strictly increasing continuous function with φ(1) = ∞,<br />
φ(0) = 0, having nonnegative <strong>de</strong>rivatives of or<strong>de</strong>rs up to d on (0, 1). Th<strong>en</strong><br />
F (u 1 , . . . , u d ) := φ(C(φ −1 (u 1 ), . . . , φ −1 (u d )))<br />
is a Lévy copula on [0, ∞] d .<br />
Proof. First, note that φ −1 is well <strong>de</strong>fined and satisfies φ −1 (0) = 0 and φ −1 (∞) = 1. Therefore,<br />
properties 1 and 2 of Definition 4.14 are clear, and in view of Equation (4.5), property 4 also<br />
holds. It remains to show that F is a d-increasing function, and since φ −1 is strictly increasing,<br />
it suffices to prove that the function φ(C(u 1 , . . . , u d )) is d-increasing on [0, 1] d .<br />
To this <strong>en</strong>d, l<strong>et</strong> us show by induction on d that if H : [0, 1] d → [0, 1] is d-increasing and<br />
groun<strong>de</strong>d and ψ : [0, 1] → [0, ∞] is a continuous increasing function with ψ(0) = 0 and positive<br />
<strong>de</strong>rivatives of or<strong>de</strong>rs up to d on (0, 1) th<strong>en</strong> ψ(H) is also d-increasing and groun<strong>de</strong>d. For d = 1,<br />
the result is clear. Suppose d ≥ 2. For k = 1, . . . , d l<strong>et</strong> a k , b k ∈ [0, 1] with a k ≤ b k . The function<br />
˜H(u 2 , . . . , u d ) := ψ(H(b 1 , u 2 , . . . , u d )) − ψ(H(a 1 , u 2 , . . . , u d )) satisfies<br />
V ψ(H) (|a 1 , b 1 | × · · · × |a d , b d |) = V ˜H(|a 2 , b 2 | × · · · × |a d , b d |),<br />
h<strong>en</strong>ce, it remains to prove that ˜H is d − 1-increasing. It can be repres<strong>en</strong>ted as follows (“∗”
168 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
stands for u 2 , . . . , u d ):<br />
˜H(∗) =<br />
∫ H(b1 ,∗)<br />
H(a 1 ,∗)<br />
ψ ′ (t)dt<br />
= (H(b 1 , ∗) − H(a 1 , ∗))<br />
∫ 1<br />
= (H(b 1 , ∗) − H(a 1 , ∗))ψ ′ +(0)<br />
+ (H(b 1 , ∗) − H(a 1 , ∗))<br />
0<br />
∫ 1<br />
0<br />
ψ ′ (H(a 1 , ∗) + t(H(b 1 , ∗) − H(a 1 , ∗)))dt<br />
{ψ ′ (H(a 1 , ∗) + t(H(b 1 , ∗) − H(a 1 , ∗))) − ψ ′ +(0)}dt.<br />
Note that ψ ′ +(0), the right <strong>de</strong>rivative of ψ at 0, is well <strong>de</strong>fined because we have supposed that<br />
d ≥ 2 and therefore ψ ′′ exists on (0, 1) and ψ ′ is increasing. In the right-hand si<strong>de</strong> of the above<br />
equation:<br />
• The integrand is d−1-increasing by the induction hypothesis, because H(a 1 , ∗)+t(H(b 1 , ∗)−<br />
H(a 1 , ∗)) is d − 1-increasing and groun<strong>de</strong>d for every t and ˜ψ(t) := ψ ′ (t) − ψ ′ +(0) is an<br />
increasing continuous function with ˜ψ(0) = 0 and nonnegative <strong>de</strong>rivatives of or<strong>de</strong>rs up to<br />
d − 1 on (0, 1).<br />
• The second term is d − 1-increasing by Lemma 4.3,<br />
• The first term is d − 1-increasing because H is,<br />
h<strong>en</strong>ce ˜H is d − 1-increasing as sum of d − 1-increasing functions and the proof is compl<strong>et</strong>e.<br />
One example of an absolutely monotonic (with positive <strong>de</strong>rivatives of all or<strong>de</strong>rs) function<br />
that maps [0, 1] into [0, ∞] is φ(x) =<br />
x<br />
1−x .<br />
The following result allows to construct Lévy copulas on (−∞, ∞] d , analogous to the<br />
Archime<strong>de</strong>an copulas (cf. [76]). It can be used to build param<strong>et</strong>ric families of Lévy copulas<br />
in arbitrary dim<strong>en</strong>sion, where the number of param<strong>et</strong>ers does not <strong>de</strong>p<strong>en</strong>d on the dim<strong>en</strong>sion.<br />
Theorem 5.2 (Archime<strong>de</strong>an Lévy copulas). L<strong>et</strong> φ : [−1, 1] → [−∞, ∞] be a strictly increasing<br />
continuous function with φ(1) = ∞, φ(0) = 0, and φ(−1) = −∞, having <strong>de</strong>rivatives of<br />
or<strong>de</strong>rs up to d on (−1, 0) and (0, 1), and satisfying<br />
L<strong>et</strong><br />
d d φ(e x )<br />
dx d ≥ 0,<br />
d d φ(−e x )<br />
dx d ≤ 0, x ∈ (−∞, 0). (5.1)<br />
˜φ(u) := 2 d−2 {φ(u) − φ(−u)}
5.1. PARAMETRIC FAMILIES 169<br />
for u ∈ [−1, 1]. Th<strong>en</strong><br />
<strong>de</strong>fines a Lévy copula.<br />
F (u 1 , . . . , u d ) := φ<br />
( d∏<br />
i=1<br />
˜φ −1 (u i )<br />
)<br />
, (u 1 , . . . , u d ) ∈ (−∞, ∞] d<br />
Proof. Firstly, note that ˜φ is a strictly increasing continuous function from [−1, 1] to [−∞, ∞],<br />
satisfying ˜φ(1) = ∞ and ˜φ(−1) = −∞, which means that ˜φ −1 exists for all u ∈ (−∞, ∞] and<br />
F is well <strong>de</strong>fined. Properties 1 and 2 of Definition 4.16 are clearly satisfied. For k = 1, . . . , d<br />
and u k ∈ R we have<br />
F {k} (u k ) = lim<br />
=<br />
=<br />
c→∞<br />
∑<br />
sgn u i<br />
F (u 1 , . . . , u d ) ∏<br />
(u i ) i≠k ∈{−c,∞} d−1 i≠k<br />
⎛<br />
⎞<br />
∑<br />
⎝ ˜φ−1 (u k ) ∏ sgn u i<br />
⎠ ∏ sgn u i<br />
i≠k<br />
i≠k<br />
(u i ) i≠k ∈{−∞,∞} d−1 φ<br />
∑d−1<br />
( ) d − 1<br />
(<br />
(−1) i φ ˜φ−1 (u k )(−1) i)<br />
i<br />
i=0<br />
= 2 d−2 {φ( ˜φ −1 (u k )) − φ(− ˜φ −1 (u k ))} = u k ,<br />
which proves property 4. It remains to show that F is d-increasing. Since ˜φ −1 is increasing,<br />
we only need to show that (u 1 , . . . , u d ) ↦→ φ( ∏ d<br />
i=1 u i) is d-increasing on (−1, 1] d , and for this,<br />
because φ( ∏ d<br />
i=1 u i) = φ( ∏ d<br />
i=1 |u i| ∏ d<br />
i=1 sgn u i), it suffices to prove that both (u 1 , . . . , u d ) ↦→<br />
φ( ∏ d<br />
i=1 u i) and (u 1 , . . . , u d ) ↦→ −φ(− ∏ d<br />
i=1 u i) are d-increasing on [0, 1] d or, equival<strong>en</strong>tly, on<br />
(0, 1) d (since φ is continuous). The first condition of (5.1) implies that<br />
∂ d ψ(z 1 , . . . , z d )<br />
∂z 1 . . . ∂z d<br />
≥ 0<br />
on (−∞, 0) d for ψ(z 1 , . . . , z d ) := φ(e z 1+···+z d<br />
). From Definition 4.5 it follows easily that<br />
∫<br />
∂ d ψ(z 1 , . . . , z d )<br />
V ψ (B) =<br />
dz 1 . . . dz d .<br />
∂z 1 . . . ∂z d<br />
B<br />
Therefore, ψ is increasing on (−∞, 0) d , which implies that (u 1 , . . . , u d ) ↦→ φ( ∏ d<br />
i=1 u i) is d-<br />
increasing on (0, 1) d .<br />
The second condition of (5.1) <strong>en</strong>tails similarly that (u 1 , . . . , u d ) ↦→<br />
−φ(− ∏ d<br />
i=1 u i) is d-increasing on (0, 1) d as well.<br />
Remark 5.1. Condition (5.1) is satisfied in particular if for any k = 1, . . . , d,<br />
d k φ(u)<br />
du k ≥ 0, u ∈ (0, 1) and (−1) k dk φ(u)<br />
du k ≤ 0, u ∈ (−1, 0).
170 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
Corollary 5.1 (Archime<strong>de</strong>an Lévy copulas for spectrally positive processes). L<strong>et</strong><br />
ψ : [0, ∞] → [0, ∞] be a strictly <strong>de</strong>creasing continuous function with ψ(0) = ∞, ψ(∞) = 0,<br />
having <strong>de</strong>rivatives of or<strong>de</strong>rs up to d on (0, ∞) and satisfying<br />
for all x ∈ (0, ∞). Th<strong>en</strong><br />
(−1) d dd ψ(x)<br />
dx d ≥ 0<br />
is a Lévy copula on [0, ∞] d .<br />
d∑<br />
F (u 1 , . . . , u d ) := ψ( ψ −1 (u i )) (5.2)<br />
i=1<br />
Proof. L<strong>et</strong><br />
⎧<br />
⎨ ψ(− log u), u ≥ 0<br />
φ(u) =<br />
, u ∈ [−1, 1].<br />
⎩<br />
−ψ(− log(−u)), u < 0<br />
Th<strong>en</strong> φ satisfies the conditions of Theorem 5.2 and therefore<br />
( d∏<br />
)<br />
¯F (u 1 , . . . , u d ) := φ φ −1 (u i /2 d−1 )<br />
i=1<br />
is a Lévy copula on (−∞, ∞] d . This implies that the function ˜F := ¯F | [0,∞] d has properties 1,<br />
2 and 3 of Definition 4.14. However, it is easy to check that ˜F (u 1 , . . . , u d )| ui =∞,i≠k = u k /2 d−1<br />
and therefore<br />
d∑<br />
2 d−1 ˜F (u1 , . . . , u d ) = 2 d−1 ψ( ψ −1 (u i /2 d−1 ))<br />
is a Lévy copula on [0, ∞] d , which means that (5.2) also <strong>de</strong>fines a positive Lévy copula.<br />
i=1<br />
Example 5.1. L<strong>et</strong><br />
with θ > 0 and η ∈ (0, 1). Th<strong>en</strong><br />
φ(x) := η(− log |x|) −1/θ 1 x≥0 − (1 − η)(− log |x|) −1/θ 1 x
5.1. PARAMETRIC FAMILIES 171<br />
2.5<br />
2.5<br />
2<br />
2<br />
1.5<br />
1.5<br />
1<br />
1<br />
0.5<br />
0.5<br />
0<br />
0<br />
−0.5<br />
−0.5<br />
−1<br />
−1<br />
−1.5<br />
−1.5<br />
−2<br />
−2<br />
−2.5<br />
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5<br />
2.5<br />
−2.5<br />
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5<br />
2<br />
1.5<br />
1<br />
0.5<br />
0<br />
−0.5<br />
−1<br />
−1.5<br />
−2<br />
−2.5<br />
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5<br />
Figure 5.1: Contour plots of Lévy <strong>de</strong>nsity with 1-stable margins and Lévy copula (5.4) with<br />
θ = 5 and differ<strong>en</strong>t values of η. Top left: η = 0. Top right: η = 1. Bottom: η = 0.5. On each<br />
curve the Lévy <strong>de</strong>nsity ν(x, y) is constant and it increases from outer curves to inner curves.<br />
<strong>de</strong>fines a two-param<strong>et</strong>er family of Lévy copulas (F is in fact a Lévy copula for all θ > 0 and<br />
η ∈ [0, 1]). The role of param<strong>et</strong>ers is most easy to analyze in the case d = 2, wh<strong>en</strong> (5.3) becomes<br />
F (u, v) = (|u| −θ + |v| −θ ) −1/θ (η1 uv≥0 − (1 − η)1 uv
172 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
2.5<br />
2.5<br />
2<br />
2<br />
1.5<br />
1.5<br />
1<br />
1<br />
0.5<br />
0.5<br />
0<br />
0<br />
−0.5<br />
−0.5<br />
−1<br />
−1<br />
−1.5<br />
−1.5<br />
−2<br />
−2<br />
−2.5<br />
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5<br />
2.5<br />
−2.5<br />
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5<br />
2.5<br />
2<br />
2<br />
1.5<br />
1.5<br />
1<br />
1<br />
0.5<br />
0.5<br />
0<br />
0<br />
−0.5<br />
−0.5<br />
−1<br />
−1<br />
−1.5<br />
−1.5<br />
−2<br />
−2<br />
−2.5<br />
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5<br />
−2.5<br />
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5<br />
Figure 5.2: Contour plots of Lévy <strong>de</strong>nsity with 1-stable margins and Lévy copula (5.4) with<br />
η = 1. Top left: θ = 0.2. Top right: θ = 0.7. Bottom left: θ = 1. Bottom right: θ = 5. On each<br />
curve the Lévy <strong>de</strong>nsity ν(x, y) is constant and it increases from outer curves to inner curves.<br />
values of η, positive jumps in one compon<strong>en</strong>t can correspond to both positive and negative<br />
jumps in the other compon<strong>en</strong>t. The param<strong>et</strong>er θ is responsible for the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of absolute<br />
values of jumps in differ<strong>en</strong>t compon<strong>en</strong>ts: from Figure 5.2 it is se<strong>en</strong> that as θ grows from 0.2 to<br />
5, the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure changes from in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce to almost compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce.<br />
Theorem 5.2 can be used to construct parsimonious mo<strong>de</strong>ls of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce; this is typically<br />
useful wh<strong>en</strong> one has little information about the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure of the problem. If a more<br />
precise vision is necessary, a possible strategy is to mo<strong>de</strong>l the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce in each corner of the<br />
Lévy measure separately. A d-dim<strong>en</strong>sional Lévy copula can be constructed from 2 d positive
5.1. PARAMETRIC FAMILIES 173<br />
Lévy copulas (one for each orthant) as follows:<br />
Theorem 5.3. For each {α 1 , . . . , α d } ∈ {−1, 1} d l<strong>et</strong> g (α 1,...,α d ) (u) : [0, ∞] → [0, 1] be a nonnegative,<br />
increasing function satisfying<br />
∑<br />
α∈{−1,1} d with α k =−1<br />
g (α 1,...,α d ) (u) = 1<br />
and<br />
∑<br />
α∈{−1,1} d with α k =1<br />
g (α 1,...,α d ) (u) = 1<br />
for all u ∈ [0, ∞] and all k ∈ {1, . . . , d}. Moreover, l<strong>et</strong> F (α 1,...,α d ) be a positive Lévy copula<br />
that satisfies the following continuity property at infinity: for all I ⊂ {k : α k = −1}, (u i ) i∈I c ∈<br />
[0, ∞] Ic we have<br />
lim F (α 1,...,α d ) (u 1 , . . . , u d ) = F (α 1,...,α d ) (v 1 , . . . , v d ),<br />
{u i } i∈I →(∞,...,∞)<br />
where v i = u i for i ∈ I c and v i = ∞ otherwise. Th<strong>en</strong><br />
F (u 1 , . . . , u d ) :=<br />
( ) d∏<br />
F (sgn u 1,...,sgn u d )<br />
|u 1 |g (sgn u 1,...,sgn u d ) (|u 1 |), . . . , |u d |g (sgn u 1,...,sgn u d ) (|u d |) sgn u i<br />
<strong>de</strong>fines a Lévy copula.<br />
i=1<br />
Proof. Properties 1 and 2 of Definition 4.16 are obvious. Property 3 follows after observing that<br />
u ↦→ ug (α 1,...,α d ) (u) is increasing on [0, ∞] for any {α 1 , . . . , α d } ∈ {−1, 1} d . To prove property<br />
4, note that<br />
( )<br />
F (α 1,...,α d )<br />
|u 1 |g (α 1,...,α d ) (|u 1 |), . . . , |u d |g (α 1,...,α d ) (|u d |) = |u k |g (α 1,...,α d ) (|u k |)<br />
for any {α 1 , . . . , α d } ∈ {−1, 1} d and any {u 1 , . . . , u d } ∈ ¯R d with u i = ∞ for all i ≠ k. Therefore,<br />
⎧<br />
⎪⎨<br />
F {k} (u) =<br />
⎪⎩<br />
∑<br />
d∏ ∏<br />
ug (α 1,...,α d ) (u) α i α j if u ≥ 0<br />
α∈{−1,1} d with α k =1<br />
∑<br />
i=1<br />
|u|g (α 1,...,α d ) (|u|)<br />
j≠k<br />
α∈{−1,1} d with α k =−1<br />
i=1 j≠k<br />
d∏ ∏<br />
α i α j if u < 0<br />
= u.
174 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
Example 5.2. L<strong>et</strong><br />
⎧<br />
⎨<br />
g (α 1,...,α d ) 1 for α 1 = · · · = α d<br />
(u) =<br />
⎩<br />
0 otherwise.<br />
Th<strong>en</strong> the Lévy copula F in Theorem 5.3 satisfies F (u 1 , . . . , u d ) = 0 if u i u j < 0 for some i, j.<br />
This means that the Lévy measure is supported by the positive and the negative orthant: either<br />
all compon<strong>en</strong>ts of the process jump up or all compon<strong>en</strong>ts jump down.<br />
5.2 Simulation of multidim<strong>en</strong>sional <strong>de</strong>p<strong>en</strong><strong>de</strong>nt Lévy processes<br />
Lévy copulas turn out to be a conv<strong>en</strong>i<strong>en</strong>t tool for simulating multidim<strong>en</strong>sional Lévy processes<br />
with specified <strong>de</strong>p<strong>en</strong><strong>de</strong>nce. In this section we first give the necessary <strong>de</strong>finitions and two auxiliary<br />
lemmas and th<strong>en</strong> prove two theorems which show how multidim<strong>en</strong>sional Lévy processes<br />
with <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures giv<strong>en</strong> by Lévy copulas can be simulated in the finite variation case<br />
(Theorem 5.6) and in the infinite variation case (Theorem 5.7).<br />
To simulate a Lévy process {X t } 0≤t≤1 on R d with Lévy measure ν, we will first simulate a<br />
Poisson random measure on [0, 1] × R d with int<strong>en</strong>sity measure λ [0,1] ⊗ ν, where λ <strong>de</strong>notes the<br />
Lebesgue measure. The Lévy process can th<strong>en</strong> be constructed via the Lévy-Itô <strong>de</strong>composition.<br />
L<strong>et</strong> F be a Lévy copula on (−∞, ∞] d such that for every I ∈ {1, . . . , d} nonempty,<br />
lim F (x 1, . . . , x d ) = F (x 1 , . . . , x d )| (xi ) i∈I =∞. (5.5)<br />
(x i ) i∈I →∞<br />
This Lévy copula <strong>de</strong>fines a positive measure µ on R d with Lebesgue margins such that for each<br />
a, b ∈ R d with a ≤ b,<br />
V F (|a, b|) = µ((a, b]). (5.6)<br />
For a one-dim<strong>en</strong>sional tail integral U, the inverse tail integral U (−1) was <strong>de</strong>fined in Equation<br />
(4.25). In the sequel we will need the following technical lemma.<br />
Lemma 5.4. L<strong>et</strong> ν be a Lévy measure on R d with marginal tail integrals U i , i = 1, . . . , d, and<br />
Lévy copula F on (−∞, ∞] d , satisfying (5.5), l<strong>et</strong> µ be <strong>de</strong>fined by (5.6) and l<strong>et</strong><br />
Th<strong>en</strong> ν is the image measure of µ by f.<br />
f : (u 1 , . . . , u d ) ↦→ (U (−1)<br />
1 (u 1 ), . . . , U (−1)<br />
d<br />
(u d )).
5.2. SIMULATION OF DEPENDENT LEVY PROCESSES 175<br />
Proof. We must prove that for each A ∈ B(R d ),<br />
ν(A) = µ({u ∈ R d : f(u) ∈ A}),<br />
but in view of Lemma 4.7, it is suffici<strong>en</strong>t to show that for each I ⊂ {1, . . . , d} nonempty and<br />
for all (x i ) i∈I ∈ (R \ {0}) |I| ,<br />
U I ((x i ) i∈I ) = µ({u ∈ R d : U (−1)<br />
i<br />
(u i ) ∈ I(x i ), i ∈ I}),<br />
where I(x) was <strong>de</strong>fined in (4.21). However, since U i is left-continuous, for every i, U (−1)<br />
i<br />
(u) ∈<br />
I(x) if and only if u ∈ (U i (x) ∧ 0, U i (x) ∨ 0]. Therefore,<br />
µ({u ∈ R d : U (−1)<br />
i<br />
(u i ) ∈ I(x i ), i ∈ I})<br />
= µ({u ∈ R d : u i ∈ (U i (x i ) ∧ 0, U i (x i ) ∨ 0], i ∈ I}) = F I ((U i (x i )) i∈I ),<br />
and an application of Theorem 4.8 compl<strong>et</strong>es the proof.<br />
By Theorem 2.28 in [1], there exists a family, in<strong>de</strong>xed by ξ ∈ R, of positive Radon measures<br />
K(ξ, dx 2 · · · dx d ) on R d−1 , such that<br />
ξ ↦→ K(ξ, dx 2 · · · dx d )<br />
is Borel measurable and<br />
µ(dx 1 . . . dx d ) = λ(dx 1 ) ⊗ K(x 1 , dx 2 · · · dx d ). (5.7)<br />
In addition, K(ξ, R d−1 ) = 1 λ-almost everywhere, that is, K(ξ, ∗) is, almost everywhere, a probability<br />
distribution. In the sequel we will call {K(ξ, ∗)} ξ∈R the family of conditional probability<br />
distributions associated to the Lévy copula F .<br />
L<strong>et</strong> F ξ be the distribution function of the measure K(ξ, ∗):<br />
F ξ (x 2 , . . . , x d ) := K(ξ, (−∞, x 2 ] × · · · × (−∞, x d ]), (x 2 , . . . , x d ) ∈ R d−1 . (5.8)<br />
The following lemma shows that it can be computed in a simple manner from the Lévy copula<br />
F .
176 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
Lemma 5.5. L<strong>et</strong> F be a Lévy copula on (−∞, ∞] d , satisfying (5.5), and F ξ be the corresponding<br />
conditional distribution function, <strong>de</strong>fined by (5.8). Th<strong>en</strong>, there exists N ⊂ R with λ(N) = 0<br />
such that for every fixed ξ ∈ R \ N, F ξ (∗) is a probability distribution function, satisfying<br />
F ξ (x 2 , . . . , x d ) = sgn(ξ) ∂ ∂ξ V F ((ξ ∧ 0, ξ ∨ 0] × (−∞, x 2 ] × · · · × (−∞, x d ]) (5.9)<br />
in every point (x 2 , . . . , x d ), where F ξ is continuous.<br />
Remark 5.2. Since the law of a random variable is compl<strong>et</strong>ely <strong>de</strong>termined by the values of its<br />
distribution function at the continuity points of the latter, being able to compute F ξ at all<br />
points where it is continuous is suffici<strong>en</strong>t for all practical purposes.<br />
Proof. Since it has already be<strong>en</strong> observed that K(ξ, R d−1 ) = 1 λ-almost everywhere, we only<br />
need to prove the second part of the lemma. L<strong>et</strong><br />
G(x 1 , . . . , x d ) := sgn x 1 V F ((x 1 ∧ 0, x 1 ∨ 0] × (−∞, x 2 ] × · · · × (−∞, x d ])<br />
By Theorem 2.28 in [1], for each f ∈ L 1 (R d , µ),<br />
∫<br />
∫ ∞<br />
f(x 1 , . . . , x d )µ(dx 1 · · · dx d ) = dx 1 f(x 1 , . . . , x d )K(x 1 , dx 2 · · · dx d ), (5.10)<br />
R d −∞<br />
∫R d<br />
which implies that<br />
∫<br />
G(x 1 , . . . , x d ) = sgn x 1<br />
(x 1 ∧0,x 1 ∨0]<br />
dξF ξ (x 2 , . . . , x d ),<br />
Therefore, for fixed (x 2 , . . . , x d ), (5.9) holds ξ-almost everywhere. Since a union of countably<br />
many s<strong>et</strong>s of zero measure is again a s<strong>et</strong> of zero measure, there exists a s<strong>et</strong> N ⊂ R with λ(N) = 0<br />
such that for every ξ ∈ R \ N, (5.9) holds for all (x 2 , . . . , x d ) ∈ Q d , where Q <strong>de</strong>notes the s<strong>et</strong> of<br />
rational numbers.<br />
Fix ξ ∈ R \ N and l<strong>et</strong> x ∈ R d−1 and {x + n } and {x − n } be two sequ<strong>en</strong>ces of d − 1-dim<strong>en</strong>sional<br />
vectors with coordinates in Q, converging to x from above and from below (compon<strong>en</strong>twise).<br />
Since F ξ is increasing in each coordinate (as a probability distribution function), the limits<br />
lim n F ξ (x + n ) and lim n F ξ (x − n ) exist. Suppose that<br />
lim F ξ (x +<br />
n<br />
n ) = lim F ξ (x −<br />
n<br />
n ) = F ∗ (5.11)<br />
and observe that for every δ ≠ 0,<br />
G(ξ + δ, x − n ) − G(ξ, x − n )<br />
δ<br />
≤<br />
G(ξ + δ, x) − G(ξ, x)<br />
δ<br />
≤ G(ξ + δ, x+ n ) − G(ξ, x + n )<br />
.<br />
δ
5.2. SIMULATION OF DEPENDENT LEVY PROCESSES 177<br />
For every ε > 0, in view of (5.11), there exists N 0 such that for every n ≥ N 0 , F ξ (x + n )−F ∗ ≤ ε/2<br />
and F ∗ − F ξ (x − n ) ≤ ε/2. Since G is differ<strong>en</strong>tiable with respect to the first variable at points<br />
(ξ, x + n ) and (ξ, x − n ), we can choose δ small <strong>en</strong>ough so that<br />
and<br />
This proves that<br />
G(ξ + δ, x − n ) − G(ξ, x − n )<br />
∣<br />
δ<br />
G(ξ + δ, x + n ) − G(ξ, x + n )<br />
∣<br />
δ<br />
− F ξ (x − n )<br />
∣ ≤ ε/2<br />
− F ξ (x + n )<br />
∣ ≤ ε/2<br />
G(ξ + δ, x) − G(ξ, x)<br />
lim<br />
= F ∗ .<br />
δ→0 δ<br />
We have thus shown that F ξ satisfies Equation (5.9) in all points where (5.11) holds, that is,<br />
where F ξ is continuous.<br />
In the following two theorems we show how Lévy copulas may be used to simulate multidim<strong>en</strong>sional<br />
Lévy processes with specified <strong>de</strong>p<strong>en</strong><strong>de</strong>nce. Our results can be se<strong>en</strong> as an ext<strong>en</strong>sion<br />
to Lévy processes, repres<strong>en</strong>ted by Lévy copulas, of the series repres<strong>en</strong>tation results, <strong>de</strong>veloped<br />
by Rosinski and others (see [84] and refer<strong>en</strong>ces therein). The first result concerns the simpler<br />
case wh<strong>en</strong> the Lévy process has finite variation on compacts.<br />
Theorem 5.6. (Simulation of multidim<strong>en</strong>sional Lévy processes, finite variation case)<br />
L<strong>et</strong> ν be a Lévy measure on R d , satisfying ∫ (|x| ∧ 1)ν(dx) < ∞, with marginal tail integrals U i ,<br />
i = 1, . . . , d and Lévy copula F (x 1 , . . . , x d ), such that the condition (5.5) is satisfied, and l<strong>et</strong><br />
K(x 1 , dx 2 · · · dx d ) be the corresponding conditional probability distributions, <strong>de</strong>fined by (5.8). L<strong>et</strong><br />
{V i } be a sequ<strong>en</strong>ce of in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt random variables, uniformly distributed on [0, 1]. Introduce<br />
d random sequ<strong>en</strong>ces {Γ 1 i }, . . . , {Γd i }, in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt from {V i} such that<br />
• N = ∑ ∞<br />
i=1 δ {Γ 1 i } is a Poisson random measure on R with int<strong>en</strong>sity measure λ.<br />
• Conditionally on Γ 1 i , the random vector (Γ2 i , . . . , Γd i ) is in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt from Γk j<br />
and all k and is distributed on R d−1 with law K(Γ 1 i , dx 2 · · · dx d ).<br />
with j ≠ i<br />
Th<strong>en</strong><br />
{Z t } 0≤t≤1 where Z k t =<br />
∞∑<br />
i=1<br />
U (−1)<br />
i<br />
(Γ k i )1 [0,t] (V i ), k = 1, . . . , d, (5.12)
178 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
is a Lévy process on the time interval [0, 1] with characteristic function<br />
( ∫<br />
)<br />
e i〈u,Zt〉 = exp t (e i〈u,z〉 − 1)ν(dz) . (5.13)<br />
R d<br />
Remark 5.3. The probability distribution function of (Γ 2 i , . . . , Γd i ) conditionally on Γ1 i<br />
from Lemma 5.9.<br />
is known<br />
Remark 5.4. The sequ<strong>en</strong>ce {Γ 1 i } i≥1 can be constructed, for example, as follows. L<strong>et</strong> {X i } i≥1 be<br />
a sequ<strong>en</strong>ce of jump times of a Poisson process with jump int<strong>en</strong>sity equal to 2. Th<strong>en</strong> it is easy<br />
to check that one can <strong>de</strong>fine Γ 1 i by Γ1 i = X i(−1) i .<br />
Proof. First note that {Γ k i } are well <strong>de</strong>fined since by Lemma 5.5, K(x 1, ∗) is a probability<br />
distribution for almost all x 1 . L<strong>et</strong><br />
Z k τ,t =<br />
∑<br />
−τ≤Γ 1 i ≤τ U (−1)<br />
k<br />
(Γ k i )1 Vi ≤t, k = 1, . . . , d.<br />
By Proposition 3.8 in [82],<br />
∫<br />
Zτ,t k =<br />
U (−1)<br />
k<br />
(x k )M(ds × dx 1 · · · dx d ),<br />
[0,t]×[−τ,τ]×R d−1<br />
where M is a Poisson random measure on [0, 1] × R d<br />
µ(dx 1 · · · dx d ), and the measure µ was <strong>de</strong>fined in Equation (5.6).<br />
with int<strong>en</strong>sity measure λ [0,1] (dt) ⊗<br />
By Lemma 5.4 and Proposition 3.7 in [82],<br />
∫<br />
Zτ,t k = x k N τ (ds × dx 1 · · · dx d ), (5.14)<br />
[0,t]×R d<br />
for some Poisson random measure N τ on [0, 1]×R d with int<strong>en</strong>sity measure λ [0,1] (ds)⊗ν τ (dx 1 · · · dx d ),<br />
where<br />
ν τ := 1 (−∞,U<br />
(−1)<br />
1 (−τ)]∪[U (−1)<br />
1 (τ),∞) (x 1)ν(dx 1 · · · dx d ) (5.15)<br />
The Lévy-Itô <strong>de</strong>composition [87, Theorem 19.2] implies that Z τ,t is a Lévy process on the time<br />
interval [0, 1] with characteristic function<br />
( ∫<br />
)<br />
e i〈u,Zτ,t〉 = exp t (e i〈u,z〉 − 1)ν τ (dz)<br />
R d .<br />
L<strong>et</strong> h be a boun<strong>de</strong>d continuous truncation function such that h(x) ≡ x on a neighborhood of<br />
0. Since lim τ→∞ U (−1)<br />
1 (τ) = 0 and lim τ→∞ U (−1)<br />
1 (−τ) = 0, by dominated converg<strong>en</strong>ce,<br />
∫<br />
∫<br />
∫<br />
∫<br />
h 2 (x)ν τ (dx) −−−→ h 2 (x)ν(dx) and h(x)ν τ (dx) −−−→ h(x)ν(dx).<br />
R d τ→∞<br />
R d R d τ→∞<br />
R d
5.2. SIMULATION OF DEPENDENT LEVY PROCESSES 179<br />
Moreover, for every f ∈ C b (R d ) such that f(x) ≡ 0 on a neighborhood of 0,<br />
∫<br />
∫<br />
f(x)ν τ (dx) = f(x)ν(dx)<br />
R d R d<br />
starting from a suffici<strong>en</strong>tly large τ. Therefore, Proposition 1.7 allows to conclu<strong>de</strong> that {Z τ,t } 0≤t≤1<br />
converges in law to a Lévy process with characteristic function giv<strong>en</strong> by (5.13).<br />
If the Lévy process has paths of infinite variation on compacts, it can no longer be repres<strong>en</strong>ted<br />
as the sum of its jumps and we have to introduce a c<strong>en</strong>tering term into the series<br />
(5.12).<br />
Theorem 5.7. (Simulation of multidim<strong>en</strong>sional Lévy processes, infinite variation<br />
case)<br />
L<strong>et</strong> ν be a Lévy measure on R d with marginal tail integrals U i , i = 1, . . . , d and Lévy copula<br />
F (x 1 , . . . , x d ), such that the condition (5.5) is satisfied. L<strong>et</strong> {V i } and {Γ 1 i }, . . . , {Γd i } be as in<br />
Theorem 5.6. L<strong>et</strong><br />
∫<br />
A k (τ) =<br />
|x|≤1<br />
where ν τ is giv<strong>en</strong> by (5.15). Th<strong>en</strong> the process<br />
{Z τ,t } 0≤t≤1 , where Z k τ,t = ∑<br />
x k ν τ (dx 1 · · · dx d ), k = 1 . . . d,<br />
U (−1)<br />
k<br />
−τ≤Γ 1 i ≤τ<br />
(Γ k i )1 Vi ≤t − tA k (τ),<br />
converges in law as τ → ∞ to a Lévy process {Z t } 0≤t≤1 on the time interval [0, 1] with characteristic<br />
function<br />
( ∫<br />
)<br />
e i〈u,Zt〉 = exp t (e i〈u,z〉 − 1 − i〈u, z〉)1 |z|≤1 ν(dz) . (5.16)<br />
R d<br />
Proof. The proof is ess<strong>en</strong>tially the same as in Theorem 5.6. Similarly to Equation (5.14), Z k τ,s<br />
can now be repres<strong>en</strong>ted as<br />
Z k τ,s =<br />
∫<br />
[0,s]×{x∈R d :|x|≤1}<br />
x k {N τ (ds × dx 1 · · · dx d ) − dsν τ (dx 1 · · · dx d )}<br />
∫<br />
+<br />
x k N τ (ds × dx 1 · · · dx d ),<br />
[0,s]×{x∈R d :|x|>1}<br />
where N τ is a Poisson random measure on [0, 1] × R d with int<strong>en</strong>sity measure λ [0,1] (ds) ⊗ ν τ ,<br />
and ν τ is <strong>de</strong>fined by (5.15). This <strong>en</strong>tails that Z τ,s is a Lévy process (compound Poisson) with
180 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
−10 −8 −6 −4 −2 0 2 4 6 8 10<br />
Figure 5.3: Conditional distribution function F ξ , corresponding to the Lévy copula of Example<br />
5.1 with ξ = 1, θ = 1 and η = 0.25.<br />
characteristic function<br />
e i〈u,Zτ,t〉 = exp<br />
( ∫<br />
)<br />
t (e i〈u,z〉 − 1 − i〈u, z〉1 |z|≤1 )ν τ (dz) .<br />
R d<br />
Proposition 1.7 once again allows to conclu<strong>de</strong> that (Z τ,s ) 0≤s≤1 converges in law to a Lévy process<br />
with characteristic function (5.16).<br />
Example 5.3. L<strong>et</strong> d = 2 and F be the Lévy copula of Example 5.1. A straightforward computation<br />
yields:<br />
F ξ =<br />
⎧ (<br />
⎨<br />
⎩ (1 − η) + 1 +<br />
∣ ) ⎫<br />
ξ ∣∣∣<br />
θ<br />
−1−1/θ<br />
⎬<br />
∣<br />
(η − 1 x2
5.2. SIMULATION OF DEPENDENT LEVY PROCESSES 181<br />
8<br />
1<br />
7<br />
0.5<br />
6<br />
0<br />
5<br />
−0.5<br />
4<br />
−1<br />
3<br />
−1.5<br />
2<br />
−2<br />
1<br />
−2.5<br />
0<br />
−3<br />
−1<br />
−3.5<br />
−2<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
−4<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1<br />
Figure 5.4: Trajectories of two variance gamma processes with <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure giv<strong>en</strong> by<br />
the Lévy copula of Example 5.1. In both graphs both variance gamma processes are driftless<br />
and have param<strong>et</strong>ers c = 10, λ − = 1 and λ + = 1 (cf. Equation (1.19)). In the left graph, the<br />
<strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> the two compon<strong>en</strong>ts is strong both in terms of sign and absolute value<br />
(η = 0.9 and θ = 3): the processes jump mostly in the same direction and the sizes of jumps<br />
are similar. In the right graph the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of absolute values is weak (θ = 0.5) and the<br />
<strong>de</strong>p<strong>en</strong><strong>de</strong>nce of jump sign is negative (η = 0.25).<br />
If ν is a Lévy measure on R 2 , satisfying ∫ (|x|∧1)ν(dx) < ∞ with marginal tail integrals U 1 , U 2<br />
and Lévy copula F of Example 5.1, the Lévy process with characteristic function (5.13) can be<br />
simulated as follows. L<strong>et</strong> {V i } and {Γ 1 i } be as in Theorem 5.6 and l<strong>et</strong> {W i} be an in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt<br />
sequ<strong>en</strong>ce of in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt random variables, uniformly distributed on [0, 1].<br />
For each i, l<strong>et</strong><br />
Γ 2 i = F −1 (W<br />
Γ 1 i ). Th<strong>en</strong> the Lévy process that we want to simulate is giv<strong>en</strong> by Equation (5.12).<br />
i<br />
Figure 5.4 shows the simulated trajectories of variance gamma processes with <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
structure giv<strong>en</strong> by the Lévy copula of Example 5.1 with differ<strong>en</strong>t values of param<strong>et</strong>ers. The<br />
number of jumps for each trajectory was limited to 2000 and the inverse tail integral of the<br />
variance gamma Lévy measure was computed by inverting numerically the expon<strong>en</strong>tial integral<br />
function (function expint available in MATLAB). Simulating two trajectories with 2000 jumps<br />
each takes about 1 second on a P<strong>en</strong>tium III computer running MATLAB, but this time could be<br />
reduced by several or<strong>de</strong>rs of magnitu<strong>de</strong> if the inverse expon<strong>en</strong>tial integral function is tabulated<br />
and a lower-level programming language (e.g. C++) is used.
182 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
5.3 A two-dim<strong>en</strong>sional variance gamma mo<strong>de</strong>l for option pricing<br />
In this section we pres<strong>en</strong>t a case study showing how one particular mo<strong>de</strong>l, constructed using<br />
Lévy copulas, can be used to price multi-ass<strong>et</strong> options.<br />
The mo<strong>de</strong>l We suppose that un<strong>de</strong>r the risk-neutral probability, the prices {S 1 t } t≥0 and<br />
{S 2 t } t≥0 of two risky ass<strong>et</strong>s satisfy<br />
S 1 t = e rt+X1 t , S 2 t = e rt+X2 t , (5.18)<br />
where (X 1 , X 2 ) is a Lévy process on R d with characteristic tripl<strong>et</strong> (0, ν, b) with respect to<br />
zero truncation function. X 1 and X 2 are supposed to be variance gamma processes, that is,<br />
the margins ν 1 and ν 2 of ν are of the form (1.19) with param<strong>et</strong>ers c 1 , λ 1 +, λ 1 − and c 2 , λ 2 +, λ 2 −.<br />
The Lévy copula F of ν is supposed to be of the form (5.4) with param<strong>et</strong>ers θ and η. The<br />
no-arbitrage condition imposes that for i = 1, 2, λ i + > 1 and the drift coeffici<strong>en</strong>ts satisfy<br />
(<br />
b i = c i log 1 − 1<br />
λ i + 1<br />
+ λ i − 1 )<br />
− λ i .<br />
+ λi −<br />
The problem In the rest of this section, mo<strong>de</strong>l (5.18) will be used to price two differ<strong>en</strong>t kinds<br />
of multi-ass<strong>et</strong> options: the option on weighted average, whose payoff at expiration date T is<br />
giv<strong>en</strong> by<br />
( 2∑ +<br />
H T = w i ST i − K)<br />
with w 1,2 ≥ 0 and w 1 + w 2 = 1,<br />
i=1<br />
and the best-of or alternative option with payoff structure<br />
H T =<br />
( ( S<br />
1<br />
) ) +<br />
N max T<br />
S0<br />
1 , S2 T<br />
S0<br />
2 − K<br />
Option pricing by Monte Carlo Bask<strong>et</strong> options, <strong>de</strong>scribed above can be priced by Monte<br />
Carlo m<strong>et</strong>hod using European options on individual stocks as control variates. D<strong>en</strong>ote the<br />
discounted payoffs of European options by<br />
V i T = e −rT (S i T − K) + for i = 1, 2.
5.3. TWO-DIMENSIONAL VARIANCE GAMMA MODEL 183<br />
0.2<br />
0.2<br />
0.1<br />
0.1<br />
0<br />
0<br />
−0.1<br />
−0.1<br />
−0.2<br />
−0.2<br />
−0.2 −0.1 0 0.1 0.2<br />
−0.2 −0.1 0 0.1 0.2<br />
Figure 5.5: Scatter plots of r<strong>et</strong>urns in a 2-dim<strong>en</strong>sional variance gamma mo<strong>de</strong>l with correlation<br />
ρ = 50% and differ<strong>en</strong>t tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce. Left: strong tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce (η = 0.75 and θ = 10).<br />
Right: weak tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce (η = 0.99 and θ = 0.61).<br />
and the discounted payoff of the bask<strong>et</strong> option by V T = e −rT H T . Th<strong>en</strong> the Monte Carlo<br />
estimate of bask<strong>et</strong> option price is giv<strong>en</strong> by<br />
Ê[V T ] = ¯V T + a 1 (E[V 1 T ] − ¯V 1 T ) + a 2 (E[V 2 T ] − ¯V 2 T ),<br />
where a bar over a random variable <strong>de</strong>notes the sample mean over N i.i.d. realizations of this<br />
variable, that is, ¯V T = 1 ∑ N<br />
N i=1 V (i)<br />
(i)<br />
T<br />
, where V<br />
T<br />
are in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt and have the same law as V T .<br />
The coeffici<strong>en</strong>ts a 1 and a 2 should be chos<strong>en</strong> in or<strong>de</strong>r to minimize the variance of Ê[V T ]. It is easy<br />
to see that this variance is minimal if a = Σa 0 , where Σ ij = Cov(V i T , V j T ) and a0 i = Cov(V T , V i T ).<br />
In practice these covariances are replaced by their in-sample estimates; this may introduce a<br />
bias into the estimator Ê[V T ], but for suffici<strong>en</strong>tly large samples this bias is small compared to<br />
the Monte Carlo error [45].<br />
To illustrate the option pricing procedure, we fixed the following param<strong>et</strong>ers of the marginal<br />
distributions of the two ass<strong>et</strong>s: c 1 = c 2 = 25, λ 1 + = 28.9, λ 1 − = 21.45, λ 2 + = 31.66 and<br />
λ 2 − = 25.26. In the param<strong>et</strong>rization (1.18) this corresponds to θ 1 = θ 2 = −0.2, κ 1 = κ 2 = 0.04,<br />
σ 1 = 0.3 and σ 2 = 0.25. To emphasize the importance of tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce for pricing multi-ass<strong>et</strong><br />
options, we used two s<strong>et</strong>s of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce param<strong>et</strong>ers, which correspond both to a correlation<br />
of 50% (the correlation is computed numerically) but lead to r<strong>et</strong>urns with very differ<strong>en</strong>t tail<br />
<strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures:
184 CHAPTER 5. APPLICATIONS OF LEVY COPULAS<br />
0.04<br />
0.035<br />
Tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
No tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
0.04<br />
0.035<br />
Tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
No tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
0.03<br />
0.03<br />
0.025<br />
0.025<br />
0.02<br />
0.02<br />
0.015<br />
0.015<br />
0.01<br />
0.01<br />
0.005<br />
0.005<br />
0<br />
0.95 1 1.05<br />
0<br />
0.95 1 1.05<br />
Figure 5.6: Prices of options on weighted average (left) and of best-of options (right) for two<br />
differ<strong>en</strong>t <strong>de</strong>p<strong>en</strong><strong>de</strong>nce patterns.<br />
Pattern 1 Strong tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce: θ = 10 and η = 0.75. The scatter plot of r<strong>et</strong>urns is shown<br />
in Figure 5.5, left graph. Although the signs of r<strong>et</strong>urns may be differ<strong>en</strong>t, the probability<br />
that the r<strong>et</strong>urns will be large in absolute value simultaneously in both compon<strong>en</strong>ts is very<br />
high.<br />
Pattern 2 Weak tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce: θ = 0.61 and η = 0.99. The scatter plot of r<strong>et</strong>urns in shown<br />
in Figure 5.5, right graph. With this <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure the r<strong>et</strong>urns typically have the<br />
same sign but their absolute values are not correlated.<br />
In each of the two cases, a sample of 1000 realizations of the couple (XT 1 , X2 T<br />
) with T = 0.02<br />
(one-week options) was simulated using the procedure <strong>de</strong>scribed in Example 5.3. The cutoff<br />
param<strong>et</strong>er τ (see Equation (5.14)) was tak<strong>en</strong> equal to 1000, which lead to limiting the average<br />
number of jumps for each trajectory to about 40. For this value of τ, Ui<br />
−1 (τ) is of or<strong>de</strong>r of<br />
10 −19 for both ass<strong>et</strong>s. Since for the variance gamma mo<strong>de</strong>l the converg<strong>en</strong>ce of U −1 to zero as<br />
τ → ∞ is expon<strong>en</strong>tial, the error resulting from the truncation of small jumps is of the same<br />
or<strong>de</strong>r, h<strong>en</strong>ce, negligible.<br />
Figure 5.6 shows the prices of bask<strong>et</strong> options, computed for differ<strong>en</strong>t strikes with <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
patterns giv<strong>en</strong> above. The initial ass<strong>et</strong> prices were S0 1 = S2 0 = 1, and the interest rate was tak<strong>en</strong><br />
to be r = 0.03. For the option on weighted average, the weights w i were both equal to 0.5<br />
and for the best-of option the coeffici<strong>en</strong>t was N = 1. The prices of European options, used for
5.3. TWO-DIMENSIONAL VARIANCE GAMMA MODEL 185<br />
variance reduction, were computed using the Fourier transform algorithm <strong>de</strong>scribed in Chapter<br />
1. The standard <strong>de</strong>viation of Monte Carlo estimates of option prices was below 2 · 10 −4 at the<br />
money in all cases.<br />
The differ<strong>en</strong>ce b<strong>et</strong>we<strong>en</strong> option prices computed with and without tail <strong>de</strong>p<strong>en</strong><strong>de</strong>ce is clearly<br />
important for both types of options: as se<strong>en</strong> from Figure 5.6, neglecting tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce may<br />
easily lead to a 10% error on the option price at the money. On the other hand, this example<br />
shows that using Lévy copulas allows to take into account the tail <strong>de</strong>p<strong>en</strong><strong>de</strong>nce and discriminate<br />
b<strong>et</strong>we<strong>en</strong> two situations that would be undistinguishable in a log-normal framework.
186 CHAPTER 5. APPLICATIONS OF LEVY COPULAS
Conclusions and perspectives<br />
In the first part of this thesis we have solved, using <strong>en</strong>tropic regularization, the ill-posed problem<br />
of calibrating an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l to options data and proposed a stable numerical<br />
m<strong>et</strong>hod for computing this solution. Applying our m<strong>et</strong>hod to prices of in<strong>de</strong>x options allowed us<br />
to estimate the risk-neutral Lévy measures, implied by mark<strong>et</strong> prices. This object is the analog,<br />
for expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls, of implied volatility, used in the Black-Scholes framework. Our<br />
empirical results allow to make a number of important conclusions. First, using an expon<strong>en</strong>tial<br />
Lévy mo<strong>de</strong>l one can calibrate with high precision the prices of a s<strong>et</strong> of options with common<br />
maturity. Moreover, high quality of calibration is achieved already by using finite-int<strong>en</strong>sity Lévy<br />
processes. Therefore, from the point of view of option pricing the imperative for using more<br />
complex infinite-int<strong>en</strong>sity mo<strong>de</strong>ls is not clear. The third conclusion is that ev<strong>en</strong> in the nonparam<strong>et</strong>ric<br />
s<strong>et</strong>ting it is impossible, using an expon<strong>en</strong>tial Lévy mo<strong>de</strong>l, to calibrate accurately<br />
the prices of stock in<strong>de</strong>x options of several maturities at the same time: options of differ<strong>en</strong>t<br />
maturities produce differ<strong>en</strong>t implied Lévy measures. This confirms the observation already ma<strong>de</strong><br />
by several authors [13, 68] that the framework of expon<strong>en</strong>tial Lévy mo<strong>de</strong>ls is not suffici<strong>en</strong>tly<br />
flexible to reproduce the term structure of implied volatilities correctly.<br />
In view of the above conclusions, we plan to continue the line of research initiated by this<br />
thesis, by ext<strong>en</strong>ding its results to mo<strong>de</strong>ls of stock price behavior that do allow to <strong>de</strong>scribe the<br />
<strong>en</strong>tire term structure of implied volatilities, e.g. mo<strong>de</strong>ls based on additive processes (processes<br />
with in<strong>de</strong>p<strong>en</strong><strong>de</strong>nt but not stationary increm<strong>en</strong>ts) and hybrid mo<strong>de</strong>ls including both jumps and<br />
stochastic volatility. The second important direction of future research is to investigate the<br />
impact of our calibration m<strong>et</strong>hodology on the m<strong>et</strong>hods of hedging in pres<strong>en</strong>ce of jumps in stock<br />
prices.<br />
In the second part of this thesis we introduced the notion of Lévy copula, providing a<br />
187
188 CONCLUSIONS AND PERSPECTIVES<br />
g<strong>en</strong>eral framework in which the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce structures of multidim<strong>en</strong>sional Lévy processes can<br />
be <strong>de</strong>scribed. Lévy copulas compl<strong>et</strong>ely characterize the possible <strong>de</strong>p<strong>en</strong><strong>de</strong>nce patterns of Lévy<br />
processes in the s<strong>en</strong>se that for every Lévy process, there exists a Lévy copula that <strong>de</strong>scribes its<br />
<strong>de</strong>p<strong>en</strong><strong>de</strong>nce structure and for every Lévy copula and every n one-dim<strong>en</strong>sional Lévy processes,<br />
there exists an n-dim<strong>en</strong>sional Lévy process with this Lévy copula and with margins giv<strong>en</strong> by<br />
these one-dim<strong>en</strong>sional processes. Multidim<strong>en</strong>sional Lévy process mo<strong>de</strong>ls for applications can<br />
thus be constructed by taking any n one-dim<strong>en</strong>sional processes and a Lévy copula from a<br />
(possibly param<strong>et</strong>ric) family. The simulation m<strong>et</strong>hods, <strong>de</strong>veloped in the last chapter of this<br />
thesis, allow to compute various quantities of interest in a Lévy copula mo<strong>de</strong>l using the Monte<br />
Carlo m<strong>et</strong>hod.<br />
The scope of pot<strong>en</strong>tial applications of Lévy copula mo<strong>de</strong>ls in finance and other domains is<br />
large. Financial applications inclu<strong>de</strong> bask<strong>et</strong> option pricing, and portfolio managem<strong>en</strong>t. Lévy<br />
copula mo<strong>de</strong>ls are also useful in insurance and in risk managem<strong>en</strong>t, to mo<strong>de</strong>l the <strong>de</strong>p<strong>en</strong><strong>de</strong>nce<br />
b<strong>et</strong>we<strong>en</strong> loss processes of differ<strong>en</strong>t business lines, and more g<strong>en</strong>erally, in all multivariate problems<br />
where <strong>de</strong>p<strong>en</strong><strong>de</strong>nce b<strong>et</strong>we<strong>en</strong> jumps needs to be tak<strong>en</strong> into account.<br />
From the point of view of applications, the next step is to <strong>de</strong>velop the m<strong>et</strong>hods of estimating<br />
Lévy copula mo<strong>de</strong>ls from the data, using, for example, simulation-based techniques of statistical<br />
infer<strong>en</strong>ce [51]. A more theor<strong>et</strong>ical research direction that we curr<strong>en</strong>tly pursue in collaboration<br />
with Jan Kalls<strong>en</strong> is to investigate the relation b<strong>et</strong>we<strong>en</strong> the Lévy copula of a Lévy process and<br />
its probabilistic copula at a giv<strong>en</strong> time.
Bibliography<br />
[1] L. Ambrosio, N. Fusco, and D. Pallara, Functions of Boun<strong>de</strong>d Variation and Free<br />
Discontinuity Problems, Oxford University Press, 2000.<br />
[2] L. An<strong>de</strong>rs<strong>en</strong> and J. Andreas<strong>en</strong>, Jump-diffusion mo<strong>de</strong>ls: Volatility smile fitting and<br />
numerical m<strong>et</strong>hods for pricing, Rev. Derivatives Research, 4 (2000), pp. 231–262.<br />
[3] M. Avellaneda, R. Buff, C. Friedman, N. Grandchamp, L. Kruk, and J. Newman,<br />
Weighted Monte Carlo: a new technique for calibrating ass<strong>et</strong>-pricing mo<strong>de</strong>ls, Int. J.<br />
Theor. Appl. <strong>Finance</strong>, 4 (2001), pp. 91–119.<br />
[4] M. Avellaneda, C. Friedman, R. Holmes, and D. Samperi, Calibrating volatility<br />
surfaces via relative <strong>en</strong>tropy minimization, Applied Mathematical <strong>Finance</strong>, 4 (1997),<br />
pp. 37–64.<br />
[5] O. Barndorff-Niels<strong>en</strong>, Processes of normal inverse Gaussian type, <strong>Finance</strong> Stoch., 2<br />
(1998), pp. 41–68.<br />
[6] O. Barndorff-Niels<strong>en</strong>, T. Mikosch, and S. Resnick, eds., Lévy Processes — Theory<br />
and Applications, Birkhäuser, Boston, 2001.<br />
[7] O. E. Barndorff-Niels<strong>en</strong>, Normal inverse Gaussian distributions and stochastic volatility<br />
mo<strong>de</strong>lling, Scand. J. Statist., 24 (1997), pp. 1–13.<br />
[8] O. E. Barndorff-Niels<strong>en</strong> and A. Lindner, Some aspects of Lévy copulas. Download<br />
from www-m4.ma.tum.<strong>de</strong>/m4/pers/lindner, 2004.<br />
189
190 BIBLIOGRAPHY<br />
[9] O. E. Barndorff-Niels<strong>en</strong> and N. Shephard, Non-Gaussian Ornstein-Uhl<strong>en</strong>beck based<br />
mo<strong>de</strong>ls and some of their uses in financial econom<strong>et</strong>rics, J. R. Statistic. Soc. B, 63 (2001),<br />
pp. 167–241.<br />
[10] D. Bates, Jumps and stochastic volatility: the exchange rate processes implicit in<br />
Deutschemark options, Rev. Fin. Studies, 9 (1996), pp. 69–107.<br />
[11] D. Bates, Post-87 crash fears in the S&P 500 futures option mark<strong>et</strong>, J. Econom<strong>et</strong>rics, 94<br />
(2000), pp. 181–238.<br />
[12] D. Bates, Maximum likelihood estimation of lat<strong>en</strong>t affine processes. Working paper, available<br />
from http://www.biz.uiowa.edu/faculty/dbates/, 2004.<br />
[13] D. S. Bates, Testing option pricing mo<strong>de</strong>ls, in Statistical M<strong>et</strong>hods in <strong>Finance</strong>, vol. 14 of<br />
Handbook of Statistics, North-Holland, Amsterdam, 1996, pp. 567–611.<br />
[14] N. Baud, A. Frachot, and T. Roncalli, How to avoid over-estimating capital charge<br />
in operational risk. Download from gro.creditlyonnais.fr/cont<strong>en</strong>t/fr/home_mc.htm,<br />
2002.<br />
[15] S. Beckers, A note on estimating param<strong>et</strong>ers of a jump-diffusion process of stock r<strong>et</strong>urns,<br />
J. Fin. and Quant. Anal., 16 (1981), pp. 127–140.<br />
[16] F. Bellini and M. Frittelli, On the exist<strong>en</strong>ce of minimax martingale measures, Math.<br />
<strong>Finance</strong>, 12 (2002), pp. 1–21.<br />
[17] J. Bertoin, Lévy Processes, Cambridge University Press, Cambridge, 1996.<br />
[18] J. Bouchaud and M. Potters, Théorie <strong>de</strong>s Risques Financiers, Aléa, Saclay, 1997.<br />
[19] S. Boyarch<strong>en</strong>ko and S. Lev<strong>en</strong>dorskiĭ, Non-Gaussian Merton-Black-Scholes Theory,<br />
World Sci<strong>en</strong>tific, River Edge, NJ, 2002.<br />
[20] R. Byrd, P. Lu, and J. Nocedal, A limited memory algorithm for bound constrained<br />
optimization, SIAM Journal on Sci<strong>en</strong>tific and Statistical Computing, 16 (1995), pp. 1190–<br />
1208.
BIBLIOGRAPHY 191<br />
[21] P. Carr, H. Geman, D. Madan, and M. Yor, The fine structure of ass<strong>et</strong> r<strong>et</strong>urns: An<br />
empirical investigation, Journal of Business, 75 (2002), pp. 305–332.<br />
[22] P. Carr, H. Geman, D. Madan, and M. Yor, Stochastic volatility for Lévy processes,<br />
Math. <strong>Finance</strong>, 13 (2003), pp. 345–382.<br />
[23] P. Carr and D. Madan, Option valuation using the fast Fourier transform, J. Comput.<br />
<strong>Finance</strong>, 2 (1998), pp. 61–73.<br />
[24] T. Chan, Pricing conting<strong>en</strong>t claims on stocks driv<strong>en</strong> by Lévy processes, Ann. Appl.<br />
Probab., 9 (1999), pp. 504–528.<br />
[25] A. S. Cherny and A. N. Shiryaev, Change of time and measure for Lévy processes.<br />
MaPhySto lecture notes series 2002-13, 2002.<br />
[26] R. Cont, J.-P. Bouchaud, and M. Potters, Scaling in financial data: Stable laws<br />
and beyond, in Scale Invariance and Beyond, B. Dubrulle, F. Graner, and D. Sorn<strong>et</strong>te, eds.,<br />
Springer, Berlin, 1997.<br />
[27] R. Cont and P. Tankov, Financial Mo<strong>de</strong>lling with Jump Processes, Chapman & Hall /<br />
CRC Press, 2004.<br />
[28] R. Cont and P. Tankov, Non-param<strong>et</strong>ric calibration of jump-diffusion option pricing<br />
mo<strong>de</strong>ls, J. Comput. <strong>Finance</strong>, 7 (2004).<br />
[29] J. W. Cooley and J. W. Tukey, An algorithm for the machine calculation of complex<br />
Fourier series, Math. Comp., 19 (1965), pp. 297–301.<br />
[30] I. Csiszar, I-diverg<strong>en</strong>ce geom<strong>et</strong>ry of probability distributions and minimization problems,<br />
Annals of Probability, 3 (1975), pp. 146–158.<br />
[31] M. H. A. Davis, Option pricing in incompl<strong>et</strong>e mark<strong>et</strong>s, in Mathematics of Derivative<br />
Securities, M. H. A. Dempster and S. R. Pliska, eds., 1997.<br />
[32] P. J. Davis and P. Rabinowitz, M<strong>et</strong>hods of Numerical Integration, Aca<strong>de</strong>mic Press,<br />
1975.
192 BIBLIOGRAPHY<br />
[33] F. Delba<strong>en</strong>, P. Grandits, T. Rheinlän<strong>de</strong>r, D. Samperi, M. Schweizer, and<br />
C. Stricker, Expon<strong>en</strong>tial hedging and <strong>en</strong>tropic p<strong>en</strong>alties, Math. <strong>Finance</strong>, 12 (2002),<br />
pp. 99–123.<br />
[34] F. Delba<strong>en</strong> and W. Schachermayer, The fundam<strong>en</strong>tal theorem of ass<strong>et</strong> pricing for<br />
unboun<strong>de</strong>d stochastic processes, Math. Ann., 312 (1998), pp. 215–250.<br />
[35] B. Dupire, Pricing with a smile, RISK, 7 (1994), pp. 18–20.<br />
[36] E. Eberlein, Applications of g<strong>en</strong>eralized hyperbolic Lévy motion to <strong>Finance</strong>, in Lévy<br />
Processes — Theory and Applications, O. Barndorff-Niels<strong>en</strong>, T. Mikosch, and S. Resnick,<br />
eds., Birkhäuser, Boston, 2001, pp. 319–336.<br />
[37] E. Eberlein, U. Keller, and K. Prause, New insights into smile, mispricing and<br />
Value at Risk: The hyperbolic mo<strong>de</strong>l, Journal of Business, 71 (1998), pp. 371–405.<br />
[38] E. Eberlein and S. Raible, Some analytic facts on the g<strong>en</strong>eralized hyperbolic mo<strong>de</strong>l, in<br />
European Congress of Mathematics, Vol. II (Barcelona, 2000), vol. 202 of Progr. Math.,<br />
Birkhäuser, Basel, 2001, pp. 367–378.<br />
[39] N. El Karoui and R. Rouge, Pricing via utility maximization and <strong>en</strong>tropy, Math.<br />
<strong>Finance</strong>, 10 (2000), pp. 259–276.<br />
[40] H. W. Engl, M. Hanke, and A. Neubauer, Regularization of Inverse Problems,<br />
vol. 375, Kluwer Aca<strong>de</strong>mic Publishers Group, Dordrecht, 1996.<br />
[41] H. Föllmer and M. Schweizer, Hedging of conting<strong>en</strong>t claims un<strong>de</strong>r incompl<strong>et</strong>e information,<br />
in Applied Stochastic Analysis, M. Davis and R. Elliott, eds., vol. 5, Gordon and<br />
Breach, London, 1991, pp. 389–414.<br />
[42] M. Frittelli, The minimal <strong>en</strong>tropy martingale measure and the valuation problem in<br />
incompl<strong>et</strong>e mark<strong>et</strong>s, Math. <strong>Finance</strong>, 10 (2000), pp. 39–52.<br />
[43] H. Geman, Pure jump Lévy processes for ass<strong>et</strong> price mo<strong>de</strong>ling, Journal of Banking and<br />
<strong>Finance</strong>, 26 (2002), pp. 1297–1316.<br />
[44] H. Geman, D. Madan, and M. Yor, Time changes for Lévy processes, Math. <strong>Finance</strong>,<br />
11 (2001), pp. 79–96.
BIBLIOGRAPHY 193<br />
[45] P. Glasserman, Monte Carlo M<strong>et</strong>hods in Financial Engineering, Springer, New York,<br />
2003.<br />
[46] P. Glasserman and B. Yu, Large sample properties of weighted Monte Carlo estimators.<br />
Preprint, available from www.gsb.columbia.edu/faculty/pglasserman/Other/, 2002.<br />
[47] T. Goll and J. Kalls<strong>en</strong>, Optimal portfolios for logarithmic utility, Stochastic Process.<br />
Appl., 89 (2000), pp. 31–48.<br />
[48] T. Goll and L. Rüsch<strong>en</strong>dorf, Minimal distance martingale measures and optimal<br />
portfolios consist<strong>en</strong>t with observed mark<strong>et</strong> prices. Preprint, available from<br />
www.stochastik.uni-freiburg.<strong>de</strong>/~goll/start.html, 2000.<br />
[49] , Minimax and minimal distance martingale measures and their relationship to portfolio<br />
optimization, <strong>Finance</strong> Stoch., 5 (2001), pp. 557–581.<br />
[50] A. V. Goncharsky, A. S. Leonov, and A. G. Yagola, Applicability of the disparity<br />
principle in the case of non-linear incorrectly posed problems, and a new regularizing<br />
algorithm for solving them, USSR Comp. Math. Math. Phys, 15 (1975), pp. 8–16.<br />
[51] C. Gouriéroux and A. Monfort, Simulation-Based Econom<strong>et</strong>ric M<strong>et</strong>hods, Oxford University<br />
Press, 1996.<br />
[52] A. Hobson, Concepts in Statistical Mechanics, Gordon and Breach, Langhorne, P<strong>en</strong>nsylvania,<br />
1971.<br />
[53] N. Jackson, E. Süli, and S. Howison, Computation of <strong>de</strong>terministic volatility surfaces,<br />
Journal of Computational <strong>Finance</strong>, 2 (1999), pp. 5–32.<br />
[54] J. Jacod and A. N. Shiryaev, Limit Theorems for Stochastic Processes, Springer, Berlin,<br />
2nd ed., 2003.<br />
[55] P. Jakub<strong>en</strong>as, On option pricing in certain incompl<strong>et</strong>e mark<strong>et</strong>s, Proceedings of the<br />
Steklov Mathematical Institute, 237 (2002).<br />
[56] H. Joe, Multivariate Mo<strong>de</strong>ls and Dep<strong>en</strong><strong>de</strong>nce Concepts, Chapman & Hall, London, 1997.
194 BIBLIOGRAPHY<br />
[57] P. Jorion, On jump processes in the foreign exchange and stock mark<strong>et</strong>s, Rev. Fin. Studies,<br />
1 (1988), pp. 427–445.<br />
[58] J. Kalls<strong>en</strong>, Utility-based <strong>de</strong>rivative pricing, in Mathematical <strong>Finance</strong> — Bachelier<br />
Congress 2000, Springer, Berlin, 2001.<br />
[59] J. Kalls<strong>en</strong> and P. Tankov, Characterization of <strong>de</strong>p<strong>en</strong><strong>de</strong>nce of multidim<strong>en</strong>sional<br />
Lévy processes using Lévy copulas. Preprint, available from<br />
www.cmap.polytechnique.fr/~tankov, 2004.<br />
[60] J. F. C. Kingman and S. J. Taylor, Introduction to Measure and Probability, Cambridge<br />
University Press, Cambridge, 1966.<br />
[61] I. Kopon<strong>en</strong>, Analytic approach to the problem of converg<strong>en</strong>ce of truncated Lévy flights<br />
towards the Gaussian stochastic process., Physical Review E, 52 (1995), pp. 1197–1199.<br />
[62] S. Kou, A jump-diffusion mo<strong>de</strong>l for option pricing, Managem<strong>en</strong>t Sci<strong>en</strong>ce, 48 (2002),<br />
pp. 1086–1101.<br />
[63] R. W. Lee, Option pricing by transform m<strong>et</strong>hods: ext<strong>en</strong>sions, unification and error control,<br />
J. Comput. <strong>Finance</strong>, 7 (2004).<br />
[64] A. Lindner and A. Szimayer, A limit theorem for copulas. Download from<br />
www-m4.ma.tum.<strong>de</strong>/m4/pers/lindner, 2003.<br />
[65] F. Lindskog and A. McNeil, Common Poisson shock mo<strong>de</strong>ls: Applications to insurance<br />
and credit risk mo<strong>de</strong>lling. Available from www.risklab.ch, September 2001.<br />
[66] D. Madan, Financial mo<strong>de</strong>ling with discontinuous price processes, in Lévy Processes<br />
— Theory and Applications, O. Barndorff-Niels<strong>en</strong>, T. Mikosch, and S. Resnick, eds.,<br />
Birkhäuser, Boston, 2001.<br />
[67] D. Madan, P. Carr, and E. Chang, The variance gamma process and option pricing,<br />
European <strong>Finance</strong> Review, 2 (1998), pp. 79–105.<br />
[68] D. Madan and M. Konikov, Option pricing using variance gamma Markov chains, Rev.<br />
Derivatives Research, 5 (2002), pp. 81–115.
BIBLIOGRAPHY 195<br />
[69] C. Mancini, Dis<strong>en</strong>tangling the jumps from the diffusion in a geom<strong>et</strong>ric jumping Brownian<br />
motion, Giornale <strong>de</strong>ll’Istituto Italiano <strong>de</strong>gli Attuari, LXIV (2001), pp. 19–47.<br />
[70] A. Medve<strong>de</strong>v and O. Scaill<strong>et</strong>, A simple calibration procedure of stochastic<br />
volatility mo<strong>de</strong>ls with jumps by short term asymptotics. Download from<br />
www.hec.unige.ch/professeurs/SCAILLET_Olivier/pages_web/Home_Page.htm, 2004.<br />
[71] R. Merton, Option pricing wh<strong>en</strong> un<strong>de</strong>rlying stock r<strong>et</strong>urns are discontinuous, J. Financial<br />
Economics, 3 (1976), pp. 125–144.<br />
[72] Y. Miyahara, Canonical martingale measures in incompl<strong>et</strong>e ass<strong>et</strong>s mark<strong>et</strong>s, in Proceedings<br />
of the sev<strong>en</strong>th Japan-Russian symposium (Probability theory and mathematical statistics,<br />
Tokyo 1995), World Sci<strong>en</strong>tific, 1996, pp. 343–352.<br />
[73] Y. Miyahara and T. Fujiwara, The minimal <strong>en</strong>tropy martingale measures for geom<strong>et</strong>ric<br />
Lévy processes, <strong>Finance</strong> Stoch., 7 (2003), pp. 509–531.<br />
[74] V. Morozov, On the solution of functional equations by the m<strong>et</strong>hod of regularization,<br />
Sovi<strong>et</strong> Math. Doklady, 7 (1966), pp. 414–417.<br />
[75] V. A. Morozov, The error principle in the solution of operational equations by the regularization<br />
m<strong>et</strong>hod, USSR Comp. Math. Math. Phys., 8 (1968), pp. 63–87.<br />
[76] R. Nels<strong>en</strong>, An Introduction to Copulas, Springer, New York, 1999.<br />
[77] L. Nguy<strong>en</strong>, Calibration <strong>de</strong> Modèles Financiers par Minimisation d’Entropie Relative <strong>et</strong><br />
Modèles aves Sauts, PhD thesis, Ecole Nationale <strong>de</strong> Ponts <strong>et</strong> Chaussées, 2003.<br />
[78] E. Nicolato, Stochastic Volatility Mo<strong>de</strong>ls of Ornstein-Uhl<strong>en</strong>beck Type, PhD thesis, Aarhus<br />
University, Aarhus, 2000.<br />
[79] K. Prause, The G<strong>en</strong>eralized Hyperbolic Mo<strong>de</strong>l: Estimation, Financial Derivatives, and<br />
Risk Measures, PhD thesis, Universität Freiburg i. Br., 1999.<br />
[80] W. H. Press, S. A. Teukolsky, W. T. V<strong>et</strong>terling, and B. P. Flannery, Numerical<br />
Recipes in C: the Art of Sci<strong>en</strong>tific Computing, Cambridge University Press, Cambridge,<br />
1992.
196 BIBLIOGRAPHY<br />
[81] S. Raible, Lévy Processes in <strong>Finance</strong>: Theory, Numerics and Empirical Facts, PhD thesis,<br />
Freiburg University, 1998.<br />
[82] S. I. Resnick, Extreme Values, Regular Variation and Point Processes, Springer-Verlag,<br />
1987.<br />
[83] R. T. Rockafellar, Integrals which are convex functionals, Pacific journal of mathematics,<br />
24 (1968), pp. 525–539.<br />
[84] J. Rosiński, Series repres<strong>en</strong>tations of Lévy processes from the perspective of point processes,<br />
in Lévy Processes — Theory and Applications, O. Barndorff-Niels<strong>en</strong>, T. Mikosch,<br />
and S. Resnick, eds., Birkhäuser, Boston, 2001.<br />
[85] M. Rubinstein, Implied binomial trees, Journal of <strong>Finance</strong>, 49 (1994), pp. 771–819.<br />
[86] T. H. Rydberg, The normal inverse Gaussian Lévy process: simulation and approximation,<br />
Comm. Statist. Stochastic Mo<strong>de</strong>ls, 13 (1997), pp. 887–910.<br />
[87] K. Sato, Lévy Processes and Infinitely Divisible Distributions, Cambridge University<br />
Press, Cambridge, UK, 1999.<br />
[88] B. Schweizer and A. Sklar, Probabilistic M<strong>et</strong>ric Spaces, North Holland, 1983.<br />
[89] M. Schweizer, On the minimal martingale measure and the Föllmer-Schweizer <strong>de</strong>composition,<br />
Stochastic Anal. Appl., 13 (1995), pp. 573–599.<br />
[90] A. Sklar, Random variables, distribution functions, and copulas — a personal look<br />
backward and forward, in Distributions with Fixed Marginals and Related Topics,<br />
L. Rüsch<strong>en</strong>dorf, B. Schweizer, and M. D. Taylor, eds., Institute of Mathematical Statistics,<br />
Hayward, CA, 1996.<br />
[91] M. Stutzer, A simple nonparam<strong>et</strong>ric approach to <strong>de</strong>rivative security valuation, Journal<br />
of <strong>Finance</strong>, 51 (1996), pp. 1633–1652.<br />
[92] P. Tankov, Dep<strong>en</strong><strong>de</strong>nce structure of spectrally positive multidim<strong>en</strong>sional Lévy processes.<br />
Download from www.cmap.polytechnique.fr/~tankov, 2003.
BIBLIOGRAPHY 197<br />
[93] M. Teboulle and I. Vajda, Converg<strong>en</strong>ce of best φ-<strong>en</strong>tropy estimates, IEEE transactions<br />
on information theory, 39 (1993), pp. 297–301.<br />
[94] A. N. Tikhonov and V. Ars<strong>en</strong>in, Solutions of Ill-Posed Problems, Wiley, New York,<br />
1977.<br />
[95] A. N. Tikhonov, A. V. Goncharsky, V. V. Stepanov, and A. G. Yagola, Numerical<br />
M<strong>et</strong>hods for the Solution of Ill-Posed Problems, Kluwer Aca<strong>de</strong>mic Publishers, 1995.<br />
[96] X. Zhang, Analyse Numérique <strong>de</strong>s Options Américaines dans un Modèle <strong>de</strong> Diffusion avec<br />
Sauts, PhD thesis, Ecole Nationale <strong>de</strong>s Ponts <strong>et</strong> Chaussées, 1994.
198 BIBLIOGRAPHY
In<strong>de</strong>x<br />
a posteriori param<strong>et</strong>er choice, 103<br />
alternative principle, 108<br />
bask<strong>et</strong> option, 182<br />
best-of option, 182<br />
calibration problem<br />
continuity of solutions, 67<br />
discr<strong>et</strong>ized, 96<br />
least squares, 59<br />
minimum <strong>en</strong>tropy least squares, 70<br />
numerical solution, 113<br />
regularized, 86<br />
with exact constraints, 58<br />
Cauchy process, 137<br />
characteristic tripl<strong>et</strong>, 34<br />
compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce, 140<br />
compound Poisson mo<strong>de</strong>l, 45<br />
control variate, 182<br />
copula, 136, 146<br />
discrepancy principle, 104<br />
distribution function, 142<br />
drift, 34<br />
expon<strong>en</strong>tial Lévy mo<strong>de</strong>l, 41<br />
abs<strong>en</strong>ce of arbitrage, 41<br />
risk-neutral, 43<br />
F-volume, 141<br />
Fast Fourier transform, 51<br />
g<strong>en</strong>eralized hyperbolic mo<strong>de</strong>l, 47<br />
groun<strong>de</strong>d function, 142<br />
implied volatility, 129<br />
increasing function, 142<br />
jump-diffusion, 43<br />
Kou mo<strong>de</strong>l, 44, 119<br />
Lévy copula, 147, 154<br />
archime<strong>de</strong>an, 168<br />
of a stable process, 163<br />
of compl<strong>et</strong>e <strong>de</strong>p<strong>en</strong><strong>de</strong>nce, 159<br />
of in<strong>de</strong>p<strong>en</strong><strong>de</strong>nce, 159<br />
Lévy-Khintchine repres<strong>en</strong>tation, 34<br />
Lévy measure, 34<br />
Lévy process, 33<br />
absolute continuity, 38<br />
converg<strong>en</strong>ce, 40<br />
cumulants, 35<br />
expon<strong>en</strong>tial mom<strong>en</strong>ts, 35<br />
jump-diffusion, 39<br />
mom<strong>en</strong>ts, 35<br />
simulation, 174<br />
199
200 INDEX<br />
tightness, 40<br />
levycalibration (computer program), 95, 119<br />
margins<br />
of a groun<strong>de</strong>d function, 142<br />
of a Lévy measure, 139<br />
of a Lévy process, 138<br />
of a tail integral, 147<br />
of a volume function, 144<br />
Merton mo<strong>de</strong>l, 44, 60<br />
minimal <strong>en</strong>tropy martingale measure, 72<br />
consist<strong>en</strong>t, 75<br />
Monte-Carlo m<strong>et</strong>hod, 182<br />
vega, 113<br />
volume function, 144<br />
weighted Monte Carlo, 77<br />
neutral <strong>de</strong>rivative pricing, 74<br />
normal inverse Gaussian process, 46<br />
or<strong>de</strong>red s<strong>et</strong>, 140<br />
prior Lévy process, 99<br />
regularization param<strong>et</strong>er, 102<br />
relative <strong>en</strong>tropy, 70<br />
stochastic expon<strong>en</strong>tial, 36<br />
martingale preserving property, 37<br />
strictly or<strong>de</strong>red s<strong>et</strong>, 140<br />
subordinated Brownian motion, 48<br />
tail integral, 147, 152<br />
tempered stable process, 46<br />
truncation function, 34<br />
utility indiffer<strong>en</strong>ce price, 73<br />
variance gamma process, 46, 69, 122, 182