
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Position Loop Gain<br />
Position Loop Gain has a direct effect on the response speed of Position Loop.<br />
Under the condition that there is no vibration or noise from servo motor, increasing the Position Loop Gain<br />
Value can enhance the response speed and hence reduce the positioning time.<br />
Position Loop Feed-Forward Gain<br />
Using Position Loop Feed-Forward Gain can enhance the response speed.<br />
If the Feed-Forward Gain value is setting too high, overshooting could occur and cause the INP (In Position)<br />
output contact to switch ON and OFF repeatedly.<br />
SO monitor Speed Curve and INP (In Position Signal) at the same time then increase Feed-Forward Value<br />
slowly.<br />
If Position Loop Gain is too high, Feed-Forward function will be insignificant.<br />
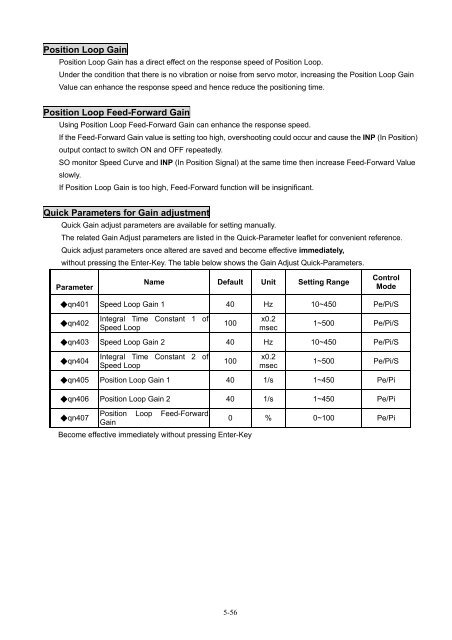
Quick Parameters for Gain adjustment<br />
Quick Gain adjust parameters are available for setting manually.<br />
The related Gain Adjust parameters are listed in the Quick-Parameter leaflet for convenient reference.<br />
Quick adjust parameters once altered are saved and be<strong>com</strong>e effective immediately,<br />
without pressing the Enter-Key. The table below shows the Gain Adjust Quick-Parameters.<br />
Parameter<br />
Name Default Unit Setting Range<br />
Control<br />
Mode<br />
◆qn401 Speed Loop Gain 1 40 Hz 10~450 Pe/Pi/S<br />
◆qn402<br />
Integral Time Constant 1 of<br />
Speed Loop<br />
100<br />
x0.2<br />
msec<br />
1~500 Pe/Pi/S<br />
◆qn403 Speed Loop Gain 2 40 Hz 10~450 Pe/Pi/S<br />
◆qn404<br />
Integral Time Constant 2 of<br />
Speed Loop<br />
100<br />
x0.2<br />
msec<br />
1~500 Pe/Pi/S<br />
◆qn405 Position Loop Gain 1 40 1/s 1~450 Pe/Pi<br />
◆qn406 Position Loop Gain 2 40 1/s 1~450 Pe/Pi<br />
◆qn407<br />
Position Loop Feed-Forward<br />
Gain<br />
Be<strong>com</strong>e effective immediately without pressing Enter-Key<br />
0 % 0~100 Pe/Pi<br />
5-56