
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
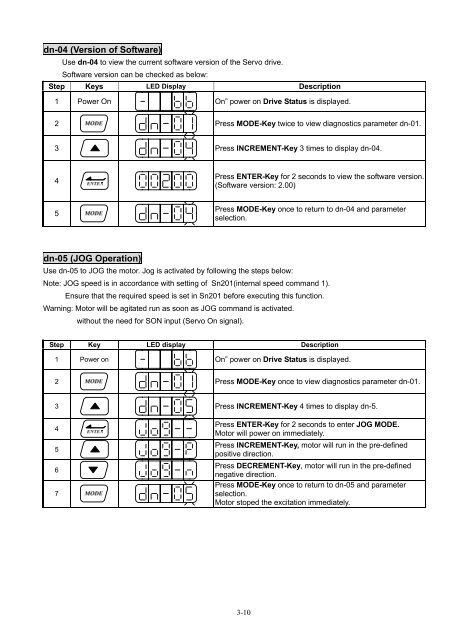
dn-04 (Version of Software)<br />
Use dn-04 to view the current software version of the Servo drive.<br />
Software version can be checked as below:<br />
Step Keys LED Display Description<br />
1 Power On On” power on Drive Status is displayed.<br />
2 Press MODE-Key twice to view diagnostics parameter dn-01.<br />
3 Press INCREMENT-Key 3 times to display dn-04.<br />
4<br />
Press ENTER-Key for 2 seconds to view the software version.<br />
(Software version: 2.00)<br />
5<br />
Press MODE-Key once to return to dn-04 and parameter<br />
selection.<br />
dn-05 (JOG Operation)<br />
Use dn-05 to JOG the motor. Jog is activated by following the steps below:<br />
Note: JOG speed is in accordance with setting of Sn201(internal speed <strong>com</strong>mand 1).<br />
Ensure that the required speed is set in Sn201 before executing this function.<br />
Warning: Motor will be agitated run as soon as JOG <strong>com</strong>mand is activated.<br />
without the need for SON input (Servo On signal).<br />
Step Key LED display Description<br />
1 Power on On” power on Drive Status is displayed.<br />
2 Press MODE-Key once to view diagnostics parameter dn-01.<br />
3 Press INCREMENT-Key 4 times to display dn-5.<br />
4<br />
5<br />
6<br />
7<br />
Press ENTER-Key for 2 seconds to enter JOG MODE.<br />
Motor will power on immediately.<br />
Press INCREMENT-Key, motor will run in the pre-defined<br />
positive direction.<br />
Press DECREMENT-Key, motor will run in the pre-defined<br />
negative direction.<br />
Press MODE-Key once to return to dn-05 and parameter<br />
selection.<br />
Motor stoped the excitation immediately.<br />
3-10