
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
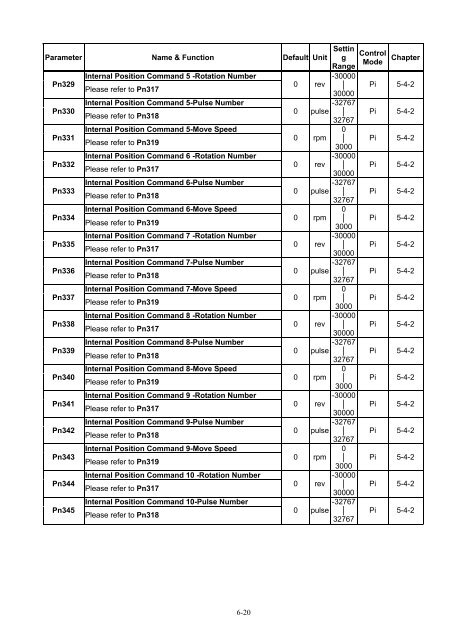
Parameter Name & Function Default Unit<br />
Pn329<br />
Pn330<br />
Pn331<br />
Pn332<br />
Pn333<br />
Pn334<br />
Pn335<br />
Pn336<br />
Pn337<br />
Pn338<br />
Pn339<br />
Pn340<br />
Pn341<br />
Pn342<br />
Pn343<br />
Pn344<br />
Pn345<br />
Internal Position Command 5 -Rotation Number<br />
Please refer to Pn317<br />
Internal Position Command 5-Pulse Number<br />
Please refer to Pn318<br />
Internal Position Command 5-Move Speed<br />
Please refer to Pn319<br />
Internal Position Command 6 -Rotation Number<br />
Please refer to Pn317<br />
Internal Position Command 6-Pulse Number<br />
Please refer to Pn318<br />
Internal Position Command 6-Move Speed<br />
Please refer to Pn319<br />
Internal Position Command 7 -Rotation Number<br />
Please refer to Pn317<br />
Internal Position Command 7-Pulse Number<br />
Please refer to Pn318<br />
Internal Position Command 7-Move Speed<br />
Please refer to Pn319<br />
Internal Position Command 8 -Rotation Number<br />
Please refer to Pn317<br />
Internal Position Command 8-Pulse Number<br />
Please refer to Pn318<br />
Internal Position Command 8-Move Speed<br />
Please refer to Pn319<br />
Internal Position Command 9 -Rotation Number<br />
Please refer to Pn317<br />
Internal Position Command 9-Pulse Number<br />
Please refer to Pn318<br />
Internal Position Command 9-Move Speed<br />
Please refer to Pn319<br />
Internal Position Command 10 -Rotation Number<br />
Please refer to Pn317<br />
Internal Position Command 10-Pulse Number<br />
Please refer to Pn318<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
0 rev<br />
0 pulse<br />
0 rpm<br />
0 rev<br />
0 pulse<br />
Settin<br />
g<br />
Range<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
0<br />
│<br />
3000<br />
-30000<br />
│<br />
30000<br />
-32767<br />
│<br />
32767<br />
Control<br />
Mode<br />
Chapter<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
Pi 5-4-2<br />
6-20