

HA-655 Series - Harmonic Drive LLC
HA-655 Series - Harmonic Drive LLC
HA-655 Series - Harmonic Drive LLC

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Chapter 2Functions<br />
(3)2-phase pulse train (A-B phase pulses with 90 degree difference)<br />
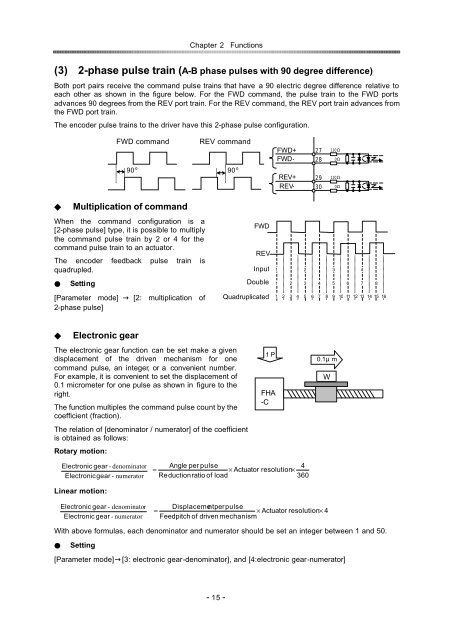
Both port pairs receive the command pulse trains that have a 90 electric degree difference relative to<br />
each other as shown in the figure below. For the FWD command, the pulse train to the FWD ports<br />
advances 90 degrees from the REV port train. For the REV command, the REV port train advances from<br />
the FWD port train.<br />
The encoder pulse trains to the driver have this 2-phase pulse configuration.<br />
FWD command<br />
90<br />
differ<br />
REV command<br />
90<br />
differ<br />
FWD+<br />
FWD-<br />
REV+<br />
REV-<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Multiplication of command<br />
When the command configuration is a<br />
[2-phase pulse] type, it is possible to multiply<br />
the command pulse train by 2 or 4 for the<br />
command pulse train to an actuator.<br />
The encoder feedback pulse train is<br />
quadrupled.<br />
FWD<br />
REV<br />
Input<br />
1<br />
2 3 4<br />
Setting<br />
Double<br />
1<br />
2 3 4 5 6 7 8<br />
[Parameter mode] [2: multiplication of<br />
2-phase pulse]<br />
Quadruplicated<br />
1<br />
2 3 4 5 6 7 8 9 10 11 12 13 14 15 16<br />
Electronic gear<br />
The electronic gear function can be set make a given<br />
displacement of the driven mechanism for one<br />
command pulse, an integer, or a convenient number.<br />
For example, it is convenient to set the displacement of<br />
0.1 micrometer for one pulse as shown in figure to the<br />
right.<br />
The function multiples the command pulse count by the<br />
coefficient (fraction).<br />
The relation of [denominator / numerator] of the coefficient<br />
is obtained as follows:<br />
Rotary motion:<br />
1 P<br />
F<strong>HA</strong><br />
-C<br />
0.1m<br />
W<br />
Electronic gear - denominator<br />
Electronicgear - numerator<br />
Angle per pulse<br />
=<br />
× Actuator resolution×<br />
Reductionratio of load<br />
4<br />
360<br />
Linear motion:<br />
Electronic gear - denominator<br />
Electronic gear - numerator<br />
Displacementperpulse<br />
=<br />
× Actuator resolution×<br />
4<br />
Feedpitch of driven mechanism<br />
With above formulas, each denominator and numerator should be set an integer between 1 and 50.<br />
Setting<br />
[Parameter mode][3: electronic gear-denominator], and [4:electronic gear-numerator]<br />
- 15 -














