Protobot - VEX Robotics
Protobot - VEX Robotics
Protobot - VEX Robotics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
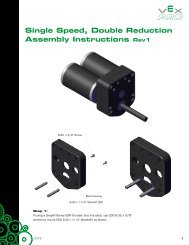
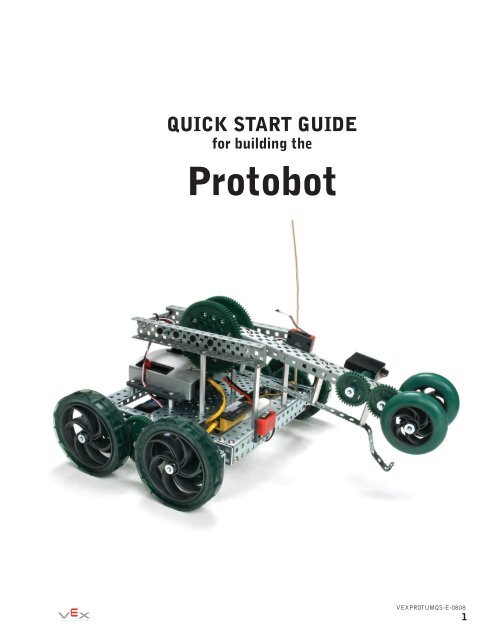
QUICK START GUIDE<br />
for building the<br />
<strong>Protobot</strong><br />
<strong>VEX</strong>PROTUMQS-E-0808<br />
1
!<br />
[5/64”]x1<br />
[3/32”]x1<br />
[1/4”]x1<br />
1 2<br />
[NK] 8-32 NUT KEPS<br />
[SS2] 1/4” MOTOR SCREW<br />
[SS4] 1/2” MOTOR SCREW<br />
[B0.5, 1, 2, 3]<br />
[5/64”]<br />
[1/4”]<br />
3 4<br />
[S2] 1/4” SCREW<br />
[S3] 3/8” SCREW<br />
[5/64”]<br />
[COL] COLLAR<br />
[3/32”]<br />
5 6<br />
[BR] POP RIVETS<br />
[BF] BEARING FLAT<br />
[BF] BEARING FLAT<br />
2
1<br />
[MOT]x1<br />
4 2<br />
[BR]x4<br />
1<br />
2 4<br />
[R15]x1<br />
= 1<br />
1<br />
6<br />
7<br />
[SS2]x2<br />
[BF]x2<br />
2<br />
[R15]x1<br />
[BF]x2<br />
6<br />
7<br />
[SS2]x2<br />
[BR]x4<br />
4 2 1<br />
= 2<br />
1 2 4<br />
[MOT]x1<br />
3<br />
[S2]x6<br />
[A15]x2<br />
[NK]x6<br />
= 3<br />
1<br />
3
4<br />
2<br />
[S2]x6<br />
= 4<br />
[NK]x6<br />
3<br />
5 [S2]x4<br />
[P15]x1<br />
4 8<br />
= 5<br />
1<br />
[NK]x4<br />
4<br />
4
6<br />
[S3]x2<br />
7<br />
610<br />
1<br />
5<br />
= 6<br />
[RX75]x1<br />
[NK]x2<br />
!8 [VMC]<br />
!<br />
VS<br />
[VMC]x1<br />
[SSX]x1<br />
6[SSX]<br />
7<br />
[S3]x2<br />
4<br />
1<br />
1<br />
[SSX]x1<br />
[B0.5]x2<br />
= 6<br />
5<br />
[S2]x2<br />
5
!<br />
VS<br />
[BP]x1<br />
[BB]x1<br />
7[BB]<br />
8<br />
[NK]x2<br />
9<br />
1<br />
1<br />
!<br />
[BB]x1<br />
VS<br />
[BP]x1<br />
6<br />
7[BP]<br />
[S3]x4<br />
4<br />
6<br />
8<br />
10<br />
[BB]x1<br />
1<br />
[S4]x2<br />
= 7<br />
6<br />
[BST]x2<br />
[NK]x4<br />
[BP]x1<br />
= 7<br />
6
!<br />
[SSX]x1<br />
VS<br />
[VMC]x1<br />
8<br />
3<br />
[B0.5]x4<br />
11<br />
1<br />
[S2]x4<br />
7<br />
!<br />
[SSX]x1<br />
9<br />
VS<br />
[VMC]x1<br />
[S3]x4<br />
= 8<br />
[VMC]x1<br />
8<br />
= 9<br />
7
10<br />
11<br />
5<br />
[B3]x4<br />
SERIAL<br />
Rx 2<br />
Rx 1<br />
+ _<br />
1<br />
1<br />
4<br />
[ZIP]x1<br />
[RX75 CABLE]x1<br />
10<br />
9<br />
[S2]x4<br />
= 10<br />
11<br />
[BF]x3<br />
1<br />
2 4 7 9 12 14<br />
[R15]x1<br />
[BR]x6<br />
= 11<br />
12<br />
5 11<br />
1<br />
[B1]x2<br />
11<br />
[S2]x2<br />
= 12<br />
8
13<br />
8<br />
[SQ2]x1<br />
12<br />
1<br />
[G60]x1<br />
= 13<br />
[COL]x2<br />
14<br />
13<br />
[COL]x2<br />
[SQ3]x1<br />
1<br />
[G60]x1<br />
13<br />
[SP1]x1<br />
[W4]x1<br />
= 14<br />
9
15<br />
3<br />
[COL]x2<br />
[SQ3]x1<br />
1<br />
14<br />
[G60]x1<br />
[SP1]x1<br />
= 15<br />
[W4]x1<br />
16<br />
1<br />
[BR]x6<br />
2 4 7 9 12 14<br />
[R15]x1<br />
= 16<br />
[BF]x3<br />
17<br />
[S2]x2<br />
5 11<br />
16<br />
1<br />
= 17<br />
[B1]x2<br />
10
18<br />
8<br />
[G60]x1<br />
17<br />
1<br />
[SQ2]x1<br />
[COL]x2<br />
= 18<br />
19<br />
[SP1]x1<br />
18<br />
[W4]x1<br />
[G60]x1<br />
1<br />
[SQ3]x1<br />
3<br />
= 19<br />
[COL]x2<br />
11
20<br />
[COL]x2<br />
[SP1]x1<br />
[W4]x1<br />
[G60]x1<br />
19<br />
1<br />
[SQ3]x1<br />
3<br />
= 20<br />
21<br />
10<br />
15<br />
= 21<br />
[S2]x2<br />
12
22<br />
20<br />
21<br />
[S2]x2<br />
= 22<br />
23<br />
[G84]x2<br />
[B1]x2<br />
= 23<br />
[S2]x4<br />
13
24<br />
23<br />
[S2]x4<br />
= 24<br />
[C25]x1<br />
[NK]x4<br />
25<br />
1<br />
[MOT]x1<br />
[SS2]x2<br />
9<br />
10<br />
24<br />
= 25<br />
14
26a<br />
[BR]x4<br />
1<br />
3<br />
4<br />
6<br />
[BF]x2<br />
25<br />
= 26a<br />
26b<br />
1<br />
3<br />
4<br />
6<br />
7<br />
9<br />
[BF]x3<br />
[BR]x6<br />
26a<br />
= 26<br />
15
27<br />
[G36]x1<br />
[COL]x2<br />
[SQ2]x1<br />
26<br />
= 27<br />
28<br />
[G36]x1<br />
[SQ2]x1<br />
[COL]x2<br />
27<br />
= 28<br />
16
29<br />
[W2.8]x2<br />
[SQ4]x1<br />
[G36]x1<br />
[SP1]x2<br />
[COL]x2<br />
28<br />
= 29<br />
30<br />
[S2]x3<br />
1<br />
29<br />
6<br />
11<br />
[B2]x3<br />
19<br />
= 30<br />
17
31<br />
[B25]x1<br />
1 3 6<br />
6<br />
[B25] 1:1 SCALE<br />
1<br />
3<br />
= 31<br />
32<br />
30<br />
[S2]x3<br />
19<br />
14<br />
31<br />
6<br />
1<br />
= 32<br />
18
33<br />
[SS2]x2<br />
3 2<br />
1<br />
[C15]x1<br />
= 33<br />
[MOT]x1<br />
34<br />
[BF]x1<br />
33<br />
= 34<br />
1<br />
[BR]x2<br />
6 8<br />
35<br />
34<br />
[S2]x2<br />
1 7<br />
22<br />
= 35<br />
19
36<br />
[SQ3]x1<br />
[SP2]x1<br />
[COL]x2<br />
[G12]x2<br />
[SP1]x2<br />
1<br />
4<br />
35<br />
= 36<br />
37<br />
[BR]x4<br />
[C15]x1<br />
[BF]x2<br />
9 7 5 3<br />
1<br />
= 37<br />
20
38<br />
37<br />
7<br />
[S2]x2<br />
1<br />
36<br />
= 38<br />
21
39<br />
[COL]x1<br />
[SP1]x1<br />
32<br />
[SQ3]x1<br />
38<br />
= 39<br />
22
40 [B2]x1<br />
[SP1]x2<br />
[S4]x2<br />
39<br />
= 40<br />
23
41<br />
1 2<br />
1 (.5”)<br />
2 (1.0”)<br />
[SWL]x2<br />
[SWL] 1:1 SCALE<br />
= 41x2<br />
24
42<br />
41<br />
[S4]x2<br />
6 7<br />
1<br />
40<br />
[NK]x2<br />
= 42<br />
43<br />
1<br />
41<br />
4<br />
5<br />
[S4]x2<br />
[NK]x2<br />
42<br />
= 43<br />
25
44<br />
!<br />
43<br />
[AT]x1<br />
[S3]x1<br />
[AH]x1<br />
[NK]x1<br />
= 44<br />
26
top view<br />
PROTOBOT<br />
WIRING DIAGRAM<br />
(not shown to scale)<br />
[ZIP] x6<br />
4.5” ZIP TIE<br />
[RX75]<br />
[BP]<br />
[BB]<br />
[P12] x1<br />
12” PWM<br />
EXTENSION<br />
MOT-2<br />
= 10<br />
SWL-1<br />
SWL-2<br />
SERIAL<br />
Rx 2<br />
Rx 1<br />
+ _<br />
P12<br />
[VMC]<br />
MOT-1<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
INTERRUPTS MOTORS<br />
ANALOG / DIGITAL<br />
RX<br />
TX<br />
16<br />
15<br />
14<br />
13<br />
12<br />
11<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
MOT-4<br />
MOT-3<br />
MOT-4<br />
MOT-3<br />
SWL-1<br />
MOT-2<br />
bottom view<br />
PROTOBOT<br />
WIRING DIAGRAM<br />
(not shown to scale)<br />
MOT-1<br />
SWL-2<br />
27
QUICK START GUIDE<br />
for building the<br />
Tumbler<br />
29
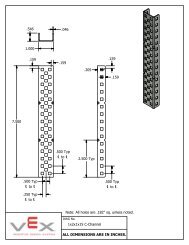
5 HOLE 10 HOLE<br />
15 HOLE<br />
[A15] x2 CHASIS BUMPER, 15 HOLE<br />
[R15] x4 CHASIS RAIL, 16 HOLE<br />
[P15] x1 PLATE, 5 x 15 HOLE<br />
[B1] x4 1” STANDOFF<br />
[SQ3] x4<br />
3” SHAFT<br />
30
20 HOLE 25 HOLE 30 HOLE<br />
[NK] x26<br />
8-32 NUT KEPS<br />
[SS2] x8<br />
1/4” MOTOR SCREW<br />
[SP2] x1<br />
SPACER THICK<br />
[S2] x24<br />
1/4” SCREW<br />
[SP1] x4<br />
SPACER THIN<br />
[S3] x11<br />
3/8” SCREW<br />
[COL] x8<br />
COLLAR<br />
[S4] x1<br />
1/2” SCREW<br />
[BF] x4<br />
BEARING FLAT<br />
[BR] x8<br />
POP RIVETS<br />
31
[MOT] x4<br />
MOTOR w/CLUTCH<br />
(not shown to scale)<br />
[OPTIONAL]<br />
[OPTIONAL]<br />
[BST] x2<br />
BATTERY TIE DOWN<br />
(not shown to scale)<br />
[BB] x1<br />
7.2V AA BATTERY BOX<br />
(not shown to scale)<br />
[W5] x4<br />
WHEELS, LARGE 5”, KNOBBY<br />
(not shown to scale)<br />
[OPTIONAL]<br />
[OPTIONAL]<br />
[AH] x1<br />
ANTENNA HOLDER<br />
(optional accessory, not shown to scale)<br />
[JMP] x1<br />
JUMPER<br />
(optional accessory, not shown to scale)<br />
[OPTIONAL]<br />
[AT] x1<br />
ANTENNA TUBE<br />
(optional accessory, not shown to scale)<br />
[OPTIONAL]<br />
[BP] x1<br />
7.2V RECHARGEABLE BATTERY<br />
(optional accessory, not shown to scale)<br />
[OPTIONAL]<br />
[OPTIONAL]<br />
[OPTIONAL]<br />
[VMC] x1<br />
MICRO CONTROLLER<br />
(optional accessory, not shown to scale)<br />
[SSX] x1<br />
SIGNAL SPLITTER<br />
(optional accessory, not shown to scale)<br />
[RX75] x1<br />
RF RECEIVER & CABLE<br />
(optional accessory, not shown to scale)<br />
32
!<br />
[5/64”]x1<br />
[3/32”]x1<br />
[1/4”]x1<br />
1 2<br />
[NK] 8-32 NUT KEPS<br />
[SS2] 1/4” MOTOR SCREW<br />
[SS4] 1/2” MOTOR SCREW<br />
[B0.5, 1, 2, 3]<br />
[5/64”]<br />
[1/4”]<br />
3 4<br />
[S2] 1/4” SCREW<br />
[S3] 3/8” SCREW<br />
[5/64”]<br />
[COL] COLLAR<br />
[3/32”]<br />
5 6<br />
[BR] POP RIVETS<br />
[BF] BEARING FLAT<br />
[BF] BEARING FLAT<br />
33
1<br />
[BR]x4<br />
11 13 15<br />
2<br />
4 6<br />
[S2]x2<br />
= 1<br />
1<br />
[B1]x2<br />
[R15]x1<br />
[BF]x2<br />
2<br />
12 13<br />
4 5<br />
[SS2]x4<br />
1<br />
[R15]x1<br />
[MOT]x2<br />
= 2<br />
3<br />
[SQ3]x2<br />
1<br />
[COL]x2<br />
= 3<br />
2<br />
[S2]x2<br />
34
4<br />
[SP1]x2<br />
[COL]x2<br />
= 4<br />
[W5]x2<br />
3<br />
5<br />
[B1]x2<br />
[BF]x2<br />
11 13 15<br />
= 5<br />
[S2]x2<br />
[R15]x1<br />
1<br />
2<br />
4 6<br />
[BR]x4<br />
35
6<br />
[MOT]x2<br />
12 13<br />
[R15]x1<br />
1<br />
4 5<br />
[SS2]x4<br />
= 6<br />
7<br />
[S2]x2<br />
[COL]x2<br />
[SQ3]x2<br />
6<br />
= 7<br />
5<br />
36
8<br />
= 8<br />
[W5]x2<br />
[SP1]x2<br />
7<br />
[COL]x2<br />
9<br />
[S2]x6<br />
= 9<br />
4<br />
[NK]x6<br />
[A15]x2<br />
37
10<br />
= 10<br />
[NK]x6<br />
8<br />
9<br />
[S2]x6<br />
11<br />
[NK]x4<br />
10<br />
= 11<br />
[P15]x1<br />
[S2]x4<br />
38
!16[BP]<br />
!<br />
[BP]x1<br />
VS<br />
[BB]x1<br />
12[BB]<br />
12<br />
[BB]x1<br />
[S3]x2<br />
4<br />
= 12<br />
1<br />
11<br />
[NK]x2<br />
39
13<br />
[NK]x2<br />
= 13<br />
[RX75]x1<br />
11<br />
1<br />
6<br />
9<br />
[S3]x2<br />
40
15 [VMC]<br />
!<br />
VS<br />
[VMC]x1<br />
[SSX]x1<br />
14[SSX]<br />
8<br />
[S3]x2<br />
= 14<br />
5<br />
[S2]x2<br />
[SSX]x1<br />
[B0.5]x2<br />
1<br />
13<br />
41
!<br />
[SSX]x1<br />
VS<br />
[VMC]x1<br />
15[VMC]<br />
[NK]x2<br />
12<br />
= 15<br />
4<br />
1<br />
14<br />
[VMC]x1<br />
[S3]x2<br />
42
!<br />
[BB]x1<br />
VS<br />
[BP]x1<br />
16[BP]<br />
[NK]x4<br />
[BST]x2<br />
9 11<br />
= 16<br />
[BP]x1<br />
3<br />
5<br />
1<br />
15<br />
[S3]x4<br />
43
17<br />
!<br />
[AT]x1<br />
[AH]x1<br />
[S3]x1<br />
= 17<br />
16<br />
[NK]x1<br />
44
top view<br />
TUMBLER<br />
WIRING DIAGRAM<br />
(not shown to scale)<br />
[RX75] [BP] [BB]<br />
MOT-3<br />
MOT-4<br />
SERIAL<br />
Rx 2<br />
Rx 1<br />
+ _<br />
[VMC]<br />
MOT-1<br />
MOT-2<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
INTERRUPTS MOTORS<br />
ANALOG / DIGITAL<br />
RX<br />
TX<br />
16<br />
15<br />
14<br />
13<br />
12<br />
11<br />
10<br />
9<br />
8<br />
7<br />
6<br />
5<br />
4<br />
3<br />
2<br />
1<br />
MOT-1<br />
MOT-2<br />
MOT-1<br />
MOT-2<br />
MOT-3<br />
MOT-4<br />
[JMP]<br />
MOT-4<br />
bottom view<br />
TUMBLER<br />
WIRING DIAGRAM<br />
(not shown to scale)<br />
MOT-3<br />
45
1<br />
PRESS<br />
BOTH<br />
MODE<br />
SELECT<br />
CHANNEL<br />
DATA<br />
INPUT<br />
+<br />
-<br />
ON<br />
POWER<br />
OFF<br />
2 3<br />
4 5<br />
46