Emerald Motors & Drive Manual - Industrial Indexing Systems
Emerald Motors & Drive Manual - Industrial Indexing Systems
Emerald Motors & Drive Manual - Industrial Indexing Systems

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
INDUSTRIAL INDEXING SYSTEMS, Inc.<br />
EMERALD SERIES MOTORS & DRIVES<br />
6.2.3 IDN DESCRIPTION - STANDARD PARAMETERS (cont’d)<br />
IB-21B001<br />
USER’S GUIDE<br />
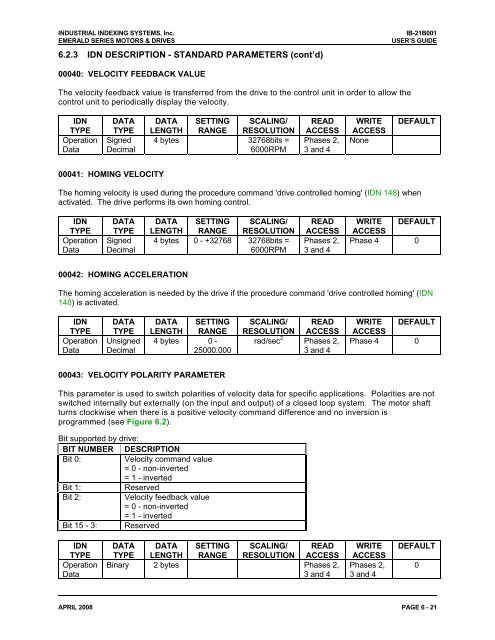
00040: VELOCITY FEEDBACK VALUE<br />
The velocity feedback value is transferred from the drive to the control unit in order to allow the<br />
control unit to periodically display the velocity.<br />
IDN<br />
TYPE<br />
Operation<br />
Data<br />
DATA<br />
TYPE<br />
Signed<br />
Decimal<br />
DATA<br />
LENGTH<br />
SETTING<br />
RANGE<br />
SCALING/<br />
RESOLUTION<br />
4 bytes 32768bits =<br />
6000RPM<br />
READ<br />
ACCESS<br />
Phases 2,<br />
3 and 4<br />
WRITE<br />
ACCESS<br />
None<br />
DEFAULT<br />
00041: HOMING VELOCITY<br />
The homing velocity is used during the procedure command 'drive controlled homing' (IDN 148) when<br />
activated. The drive performs its own homing control.<br />
IDN<br />
TYPE<br />
Operation<br />
Data<br />
DATA<br />
TYPE<br />
Signed<br />
Decimal<br />
DATA<br />
LENGTH<br />
SETTING<br />
RANGE<br />
SCALING/<br />
RESOLUTION<br />
4 bytes 0 - +32768 32768bits =<br />
6000RPM<br />
READ<br />
ACCESS<br />
Phases 2,<br />
3 and 4<br />
WRITE DEFAULT<br />
ACCESS<br />
Phase 4 0<br />
00042: HOMING ACCELERATION<br />
The homing acceleration is needed by the drive if the procedure command 'drive controlled homing' (IDN<br />
148) is activated.<br />
IDN<br />
TYPE<br />
Operation<br />
Data<br />
DATA<br />
TYPE<br />
Unsigned<br />
Decimal<br />
DATA SETTING<br />
LENGTH RANGE<br />
4 bytes 0 -<br />
25000.000<br />
SCALING/ READ<br />
RESOLUTION ACCESS<br />
rad/sec 2 Phases 2,<br />
3 and 4<br />
WRITE DEFAULT<br />
ACCESS<br />
Phase 4 0<br />
00043: VELOCITY POLARITY PARAMETER<br />
This parameter is used to switch polarities of velocity data for specific applications. Polarities are not<br />
switched internally but externally (on the input and output) of a closed loop system. The motor shaft<br />
turns clockwise when there is a positive velocity command difference and no inversion is<br />
programmed (see Figure 6.2).<br />
Bit supported by drive:<br />
BIT NUMBER DESCRIPTION<br />
Bit 0:<br />
Velocity command value<br />
= 0 - non-inverted<br />
= 1 - inverted<br />
Bit 1:<br />
Reserved<br />
Bit 2:<br />
Velocity feedback value<br />
= 0 - non-inverted<br />
= 1 - inverted<br />
Bit 15 - 3: Reserved<br />
IDN<br />
TYPE<br />
Operation<br />
Data<br />
DATA<br />
TYPE<br />
DATA<br />
LENGTH<br />
SETTING<br />
RANGE<br />
SCALING/<br />
RESOLUTION<br />
READ<br />
ACCESS<br />
Binary 2 bytes Phases 2,<br />
3 and 4<br />
WRITE<br />
ACCESS<br />
Phases 2,<br />
3 and 4<br />
DEFAULT<br />
0<br />
APRIL 2008 PAGE 6 - 21