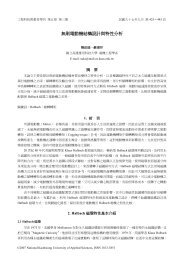
<strong>Design</strong> <strong>and</strong> <strong>Fabrication</strong> <strong>of</strong> <strong>Topologically</strong> <strong>Optimal</strong> <strong>Miniature</strong> Microgripper Integrated with an Electro-Thermal Microactuator 179 Figure 17. The SEM photo <strong>of</strong> the microgripper Figure 18. The photograph <strong>of</strong> the measure instrument 35 30 Displacement (μm) 25 20 15 10 5 0 0.1 0.5 1 1.5 2 Voltage (V) Figure 19. The output displacement with different applied voltages
180 Wei-Liang Chen, Shyh-Chour Huang 5. Conclusions This study used a truss network distribution to obtain a clear form <strong>and</strong> integrated a tweezers construction to design the compliant mechanism. The compliant mechanism uses flexibility to replace hinges which in turn reduce the hardness in micro-fabrication. The compliant mechanism uses an SU-8 photoresist element. This micro compliant microgripper could produce about 18μm in output displacement when a 1.5 volt is applied. <strong>Fabrication</strong> <strong>of</strong> compliant micromechanisms have the advantage <strong>of</strong> being built in one piece with very few fabrication steps. The device can be easily designed <strong>and</strong> fabricated. Further work to be done includes correcting errors in the simulation, assembly <strong>and</strong> characterization <strong>of</strong> the designed gripper, <strong>and</strong> the expansion <strong>of</strong> topology optimization algorithms so that they are able to incorporate electro-thermal V-shaped beam microactuator <strong>and</strong> structure behaviors. Acknowledgements The authors acknowledge <strong>and</strong> thank the National Science Council for finial support <strong>of</strong> this work under contract Number NSC 94-2212-E-151-006. Reference [1] Alison, M. S., James, R. S., Andrew, D. A., William, H. G., Robin, H. C., Ivester, Pascale Ehrenfreund, Frank, J. G., Jeffrey, L. B. <strong>and</strong> Richard, A. M., ‘‘Development <strong>and</strong> evaluation <strong>of</strong> a micro device for amino acid biomarker detection <strong>and</strong> analysis on Mars, ” PNAS, Vol. 102, pp. 1041-1046, 2005,. [2] Feng, Z., Zhang, W., Su, B., Harsh, K. F., Gupta, K. C., Bright, V. <strong>and</strong> Lee, Y. C., ‘‘<strong>Design</strong> <strong>and</strong> modeling <strong>of</strong> RF MEMS tunable capacitors using electro-thermal actuators, ” IEEE MTT-S International Microwave Symposium Digest, Vol. 4, pp. 1507-1510, 1999. [3] Lee, W. H., Kang, B. H., Young, S. O., Harry, S., Arthur, C. S., George, S. <strong>and</strong> Matthew, E., ‘‘Micropeg Manipulation with a Compliant Microgripper, ” Pro .<strong>of</strong> IEEE International Conference on Robotics <strong>and</strong> Automation, pp. 3213-3218, 2003. [4] James, Nakamura, K. <strong>and</strong> Sadayuki U., ‘‘A Piezoelectric Micromotor Using In-Plane Shearing <strong>of</strong> PZT Elements, ” IEEE/ASME Transactions on Mechatronics, Vol. 9, No. 3, pp. 467-473, 2004. [5] Chronis, N. <strong>and</strong> Lee, L. P., “Polymer MEMS-Based Microgripper for single cell manipulation,” 17th IEEE, pp. 17-20, 2004. [6] Madhab, G. B., Kumar, C. S. <strong>and</strong> Mishra, P. K., “<strong>Design</strong> <strong>of</strong> a Bio-inspired Piezoelectric Compliant <strong>Miniature</strong> Gripper,” International Conference on Smart Materials Structures <strong>and</strong> Systems, ISSS 2005, pp. 17-24, 2005. [7] Mita, M., Kawara, H., Toshiyoshi, H., Ataka, M. <strong>and</strong> Fujita, H., “An electrostatic 2-Dimensional microgripper for nano structure,” The 12th International conference on Solid States Sensors, Actuators <strong>and</strong> Microsystems, pp. 272-275, 2003. [8] Keoschkerjan, R. <strong>and</strong> Wurmus, H., “A novel microgripper with parallel movement <strong>of</strong> gripper arms,” 8th International Conference on New Actuators, pp. 321-324, 2004. [9] Chu, P. B. <strong>and</strong> Pister, K. S. J., ‘‘Analysis <strong>of</strong> Closed-loop control <strong>of</strong> Parallel-Plate Electrostatic microgripper, ” Proceedings <strong>of</strong> the IEEE International Conference on Robotics <strong>and</strong> Automation, Vol. 1, No. 8-13, pp.820-825, 1994. [10] Mita, N., Kawara, H., Toshiyoshi, H., Ataka, M. <strong>and</strong> Fujita H. , ‘‘An electrostatic 2-dimensional micro-gripper for nano structure, ” Solid-State Sensors, Actuators <strong>and</strong> Microsystems, 12th International Conference on, Vol. 1, pp.272 – 275. [11] Nogimori, W., Irisa, K., Ando, M. <strong>and</strong> Naruse Y. , ‘‘A Laser-Powered Microgripper, ” Micro Electro Mechanical Systems MEMS '1997 IEEE Proceedings, Tenth Annual International Workshop on , 26-30 Jan., pp.267-271. [12] Lkuta, K., ‘‘Micro/<strong>Miniature</strong> shape memory alloy actuator, ” Proceedings <strong>of</strong> the 1990 IEEE International Conference on Robotics <strong>and</strong> Automatio,. Vol. 3, pp. 2156-2161. [13] Kohl, M., Krevet, B. <strong>and</strong> Just E., ‘‘SMA microgripper system, ” Sensors <strong>and</strong> Actuators, A 97-98, pp.646-652, 2002. [14] Nishiwaki, S., Frecker, MI, Min, S., Kikuchi, N., “ Topology optimization <strong>of</strong> compliant mechanisms using the homogenization method,” Int. J. Numer. Meth. Engrg. 42, Vol. 42, No. 3, pp. 535–559, 1998. [15] Silva, E. C. N., Nishiwaki, S. <strong>and</strong> Kikuchi, N., ‘‘<strong>Design</strong> <strong>of</strong> flextensional transducers using homogenization design method,’’ Proc. SPIE, Vol. 3667, pp. 232-243, 1999. [16] Silva, E. C. N. <strong>and</strong> Kikuchi, N., “<strong>Design</strong> <strong>of</strong> piezoelectric transducers using topology optimization,” Smart Mater. Struct. 8, Jun, pp. 350-364, 1999. [17] Hetrick, J. A. <strong>and</strong> Kota, S., “An energy formulation for parametric size <strong>and</strong> shape optimization <strong>of</strong> compliant mechanisms,” ASME J. Mech. Des. 121, pp. 229-234, 1999. [18] Howell, L.L., Compliant Mechanisms, Wiley, New York, 2001. [19] Saxena, A. <strong>and</strong> Ananthasuresh, G. K., ‘‘On an optimal property <strong>of</strong> compliant topologies, ” Struct Multidisc Opim. 19, pp.36-49, 2000. [20] Arora, J. S., ‘‘Introduction to optimum design, ” McGraw-Hill, Singapore, 1989.