simulation of torsion moment at the wheel set of the railway vehicle ...
simulation of torsion moment at the wheel set of the railway vehicle ...
simulation of torsion moment at the wheel set of the railway vehicle ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
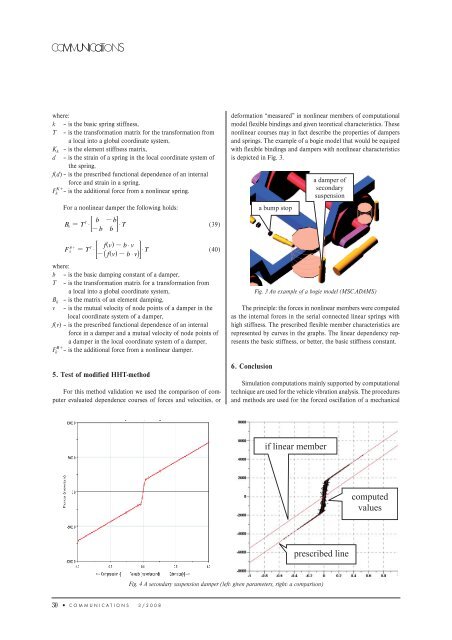
where:k – is <strong>the</strong> basic spring stiffness,T – is <strong>the</strong> transform<strong>at</strong>ion m<strong>at</strong>rix for <strong>the</strong> transform<strong>at</strong>ion froma local into a global coordin<strong>at</strong>e system,K k – is <strong>the</strong> element stiffness m<strong>at</strong>rix,d – is <strong>the</strong> strain <strong>of</strong> a spring in <strong>the</strong> local coordin<strong>at</strong>e system <strong>of</strong><strong>the</strong> spring,f(d) – is <strong>the</strong> prescribed functional dependence <strong>of</strong> an internalforce and strain in a spring,– is <strong>the</strong> additional force from a nonlinear spring.F Kkdeform<strong>at</strong>ion “measured” in nonlinear members <strong>of</strong> comput<strong>at</strong>ionalmodel flexible bindings and given teoretical characteristics. Thesenonlinear courses may in fact describe <strong>the</strong> properties <strong>of</strong> dampersand springs. The example <strong>of</strong> a bogie model th<strong>at</strong> would be equipedwith flexible bindings and dampers with nonlinear characteristicsis depicted in Fig. 3.For a nonlinear damper <strong>the</strong> following holds:bB TT-bk = $ < F $ T - b b(39)fv b vFB +TT $ $k = > ^ h -$ T(40)-_fv ^ h -b$viHwhere:b – is <strong>the</strong> basic damping constant <strong>of</strong> a damper,T – is <strong>the</strong> transform<strong>at</strong>ion m<strong>at</strong>rix for a transform<strong>at</strong>ion froma local into a global coordin<strong>at</strong>e system,B k – is <strong>the</strong> m<strong>at</strong>rix <strong>of</strong> an element damping,v – is <strong>the</strong> mutual velocity <strong>of</strong> node points <strong>of</strong> a damper in <strong>the</strong>local coordin<strong>at</strong>e system <strong>of</strong> a damper,f(v) – is <strong>the</strong> prescribed functional dependence <strong>of</strong> an internalforce in a damper and a mutual velocity <strong>of</strong> node points <strong>of</strong>F Bka damper in <strong>the</strong> local coordin<strong>at</strong>e system <strong>of</strong> a damper,– is <strong>the</strong> additional force from a nonlinear damper.5. Test <strong>of</strong> modified HHT-methodFor this method valid<strong>at</strong>ion we used <strong>the</strong> comparison <strong>of</strong> computerevalu<strong>at</strong>ed dependence courses <strong>of</strong> forces and velocities, orThe principle: <strong>the</strong> forces in nonlinear members were computedas <strong>the</strong> internal forces in <strong>the</strong> serial connected linear springs withhigh stiffness. The prescribed flexible member characteristics arerepresented by curves in <strong>the</strong> graphs. The linear dependency represents<strong>the</strong> basic stiffness, or better, <strong>the</strong> basic stiffness constant.6. ConclusionFig. 3 An example <strong>of</strong> a bogie model (MSC.ADAMS)Simul<strong>at</strong>ion comput<strong>at</strong>ions mainly supported by comput<strong>at</strong>ionaltechnique are used for <strong>the</strong> <strong>vehicle</strong> vibr<strong>at</strong>ion analysis. The proceduresand methods are used for <strong>the</strong> forced oscill<strong>at</strong>ion <strong>of</strong> a mechanicalFig. 4 A secondary suspension damper (left: given parameters, right: a comparison)30 ● COMMUNICATIONS 3/2008