development of a vision system for ship hull ... - ePrints@USM
development of a vision system for ship hull ... - ePrints@USM
development of a vision system for ship hull ... - ePrints@USM

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
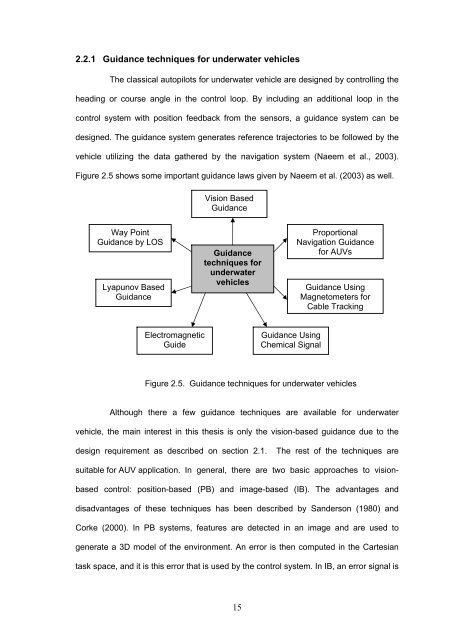
2.2.1 Guidance techniques <strong>for</strong> underwater vehiclesThe classical autopilots <strong>for</strong> underwater vehicle are designed by controlling theheading or course angle in the control loop. By including an additional loop in thecontrol <strong>system</strong> with position feedback from the sensors, a guidance <strong>system</strong> can bedesigned. The guidance <strong>system</strong> generates reference trajectories to be followed by thevehicle utilizing the data gathered by the navigation <strong>system</strong> (Naeem et al., 2003).Figure 2.5 shows some important guidance laws given by Naeem et al. (2003) as well.Vision BasedGuidanceWay PointGuidance by LOSLyapunov BasedGuidanceGuidancetechniques <strong>for</strong>underwatervehiclesProportionalNavigation Guidance<strong>for</strong> AUVsGuidance UsingMagnetometers <strong>for</strong>Cable TrackingElectromagneticGuideGuidance UsingChemical SignalFigure 2.5. Guidance techniques <strong>for</strong> underwater vehiclesAlthough there a few guidance techniques are available <strong>for</strong> underwatervehicle, the main interest in this thesis is only the <strong>vision</strong>-based guidance due to thedesign requirement as described on section 2.1. The rest <strong>of</strong> the techniques aresuitable <strong>for</strong> AUV application. In general, there are two basic approaches to <strong>vision</strong>basedcontrol: position-based (PB) and image-based (IB). The advantages anddisadvantages <strong>of</strong> these techniques has been described by Sanderson (1980) andCorke (2000). In PB <strong>system</strong>s, features are detected in an image and are used togenerate a 3D model <strong>of</strong> the environment. An error is then computed in the Cartesiantask space, and it is this error that is used by the control <strong>system</strong>. In IB, an error signal is15