A Multibody Motorcycle Model With LMS VirtualLab Motion
A Multibody Motorcycle Model With LMS VirtualLab Motion
A Multibody Motorcycle Model With LMS VirtualLab Motion
SHOW LESS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
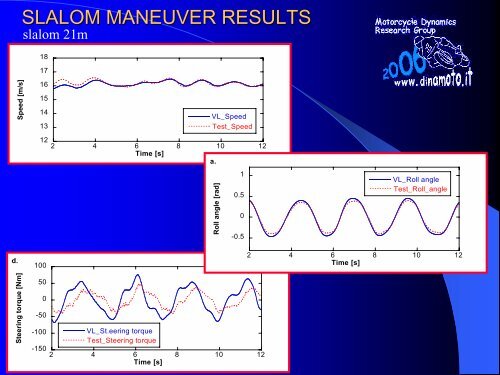
c.SLALOM MANEUVER RESULTSslalom 21m1817Speed [m/s]16151413VL_SpeedTest_Speed122 4 6 8 10 12Time [s]a.Roll angle [rad]10.50-0.5VL_Roll angleTest_Roll_angled.Steering torque [Nm]100500-50-100-150VL_St.eering torqueTest_Steering torque2 4 6 8 10 12Time [s]2 4 6 8 10 12Time [s]