Piezoelectrics in Positioning - PZT & Piezo Actuators: Sub ...
Piezoelectrics in Positioning - PZT & Piezo Actuators: Sub ...
Piezoelectrics in Positioning - PZT & Piezo Actuators: Sub ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
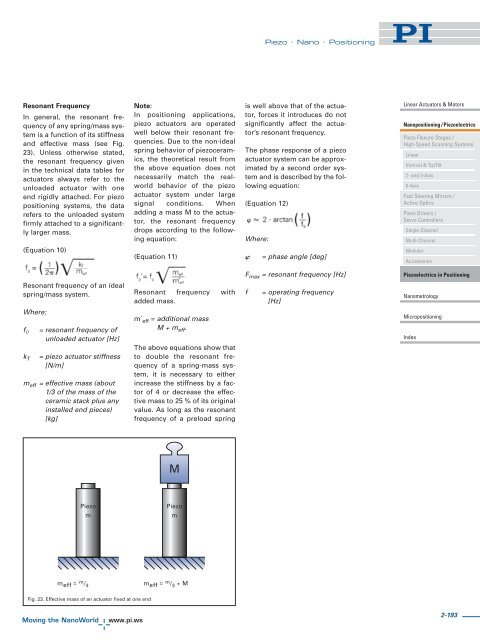
<strong>Piezo</strong> • Nano • Position<strong>in</strong>gResonant FrequencyIn general, the resonant frequencyof any spr<strong>in</strong>g/mass systemis a function of its stiffnessand effective mass (see Fig.23). Unless otherwise stated,the resonant frequency given<strong>in</strong> the technical data tables foractuators always refer to theunloaded actuator with oneend rigidly attached. For piezoposition<strong>in</strong>g systems, the datarefers to the unloaded systemfirmly attached to a significantlylarger mass.(Equation 10)Note:In position<strong>in</strong>g applications,piezo actuators are operatedwell below their resonant frequencies.Due to the non-idealspr<strong>in</strong>g behavior of piezoceramics,the theoretical result fromthe above equation does notnecessarily match the realworldbehavior of the piezoactuator system under largesignal conditions. Whenadd<strong>in</strong>g a mass M to the actuator,the resonant frequencydrops accord<strong>in</strong>g to the follow<strong>in</strong>gequation:(Equation 11)is well above that of the actuator,forces it <strong>in</strong>troduces do notsignificantly affect the actuator’sresonant frequency.The phase response of a piezoactuator system can be approximatedby a second order systemand is described by the follow<strong>in</strong>gequation:(Equation 12)Where:= phase angle [deg]L<strong>in</strong>ear <strong>Actuators</strong> & MotorsNanoposition<strong>in</strong>g / <strong><strong>Piezo</strong>electrics</strong><strong>Piezo</strong> Flexure Stages /High-Speed Scann<strong>in</strong>g SystemsL<strong>in</strong>earVertical & Tip/Tilt2- and 3-Axis6-AxisFast Steer<strong>in</strong>g Mirrors /Active Optics<strong>Piezo</strong> Drivers /Servo ControllersS<strong>in</strong>gle-ChannelMulti-ChannelModularAccessoriesF max = resonant frequency [Hz]<strong><strong>Piezo</strong>electrics</strong> <strong>in</strong> Position<strong>in</strong>gResonant frequency of an idealspr<strong>in</strong>g/mass system.Where:f Ok T= resonant frequency ofunloaded actuator [Hz]= piezo actuator stiffness[N/m]m eff = effective mass (about1/3 of the mass of theceramic stack plus any<strong>in</strong>stalled end pieces)[kg]Resonant frequency withadded mass.m´eff = additional massM+m eff .The above equations show thatto double the resonant frequencyof a spr<strong>in</strong>g-mass system,it is necessary to either<strong>in</strong>crease the stiffness by a factorof 4 or decrease the effectivemass to 25 % of its orig<strong>in</strong>alvalue. As long as the resonantfrequency of a preload spr<strong>in</strong>gf= operat<strong>in</strong>g frequency[Hz]NanometrologyMicroposition<strong>in</strong>gIndexFig. 23. Effective mass of an actuator fixed at one end2-193