Piezoelectrics in Positioning - PZT & Piezo Actuators: Sub ...
Piezoelectrics in Positioning - PZT & Piezo Actuators: Sub ...
Piezoelectrics in Positioning - PZT & Piezo Actuators: Sub ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
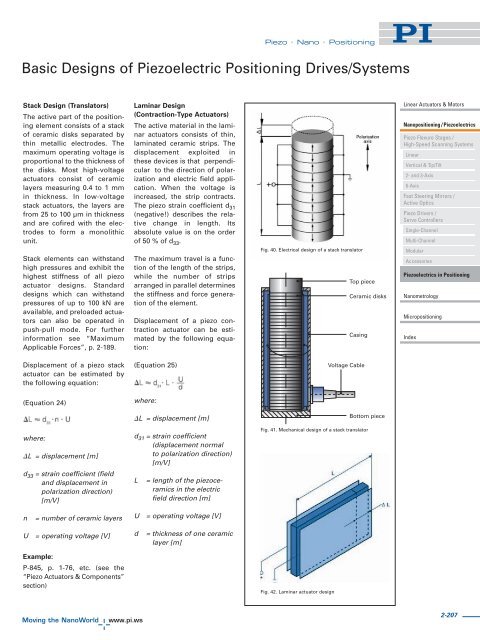
<strong>Piezo</strong> • Nano • Position<strong>in</strong>gBasic Designs of <strong>Piezo</strong>electric Position<strong>in</strong>g Drives/SystemsStack Design (Translators)The active part of the position<strong>in</strong>gelement consists of a stackof ceramic disks separated byth<strong>in</strong> metallic electrodes. Themaximum operat<strong>in</strong>g voltage isproportional to the thickness ofthe disks. Most high-voltageactuators consist of ceramiclayers measur<strong>in</strong>g 0.4 to 1 mm<strong>in</strong> thickness. In low-voltagestack actuators, the layers arefrom 25 to 100 μm <strong>in</strong> thicknessand are cofired with the electrodesto form a monolithicunit.Stack elements can withstandhigh pressures and exhibit thehighest stiffness of all piezoactuator designs. Standarddesigns which can withstandpressures of up to 100 kN areavailable, and preloaded actuatorscan also be operated <strong>in</strong>push-pull mode. For further<strong>in</strong>formation see “MaximumApplicable Forces”, p. 2-189.Lam<strong>in</strong>ar Design(Contraction-Type <strong>Actuators</strong>)The active material <strong>in</strong> the lam<strong>in</strong>aractuators consists of th<strong>in</strong>,lam<strong>in</strong>ated ceramic strips. Thedisplacement exploited <strong>in</strong>these devices is that perpendicularto the direction of polarizationand electric field application.When the voltage is<strong>in</strong>creased, the strip contracts.The piezo stra<strong>in</strong> coefficient d 31(negative!) describes the relativechange <strong>in</strong> length. Itsabsolute value is on the orderof 50 % of d 33 .The maximum travel is a functionof the length of the strips,while the number of stripsarranged <strong>in</strong> parallel determ<strong>in</strong>esthe stiffness and force generationof the element.Displacement of a piezo contractionactuator can be estimatedby the follow<strong>in</strong>g equation:Fig. 40. Electrical design of a stack translatorL<strong>in</strong>ear <strong>Actuators</strong> & MotorsNanoposition<strong>in</strong>g / <strong><strong>Piezo</strong>electrics</strong><strong>Piezo</strong> Flexure Stages /High-Speed Scann<strong>in</strong>g SystemsL<strong>in</strong>earVertical & Tip/Tilt2- and 3-Axis6-AxisFast Steer<strong>in</strong>g Mirrors /Active Optics<strong>Piezo</strong> Drivers /Servo ControllersS<strong>in</strong>gle-ChannelMulti-ChannelModularAccessories<strong><strong>Piezo</strong>electrics</strong> <strong>in</strong> Position<strong>in</strong>gNanometrologyMicroposition<strong>in</strong>gIndexDisplacement of a piezo stackactuator can be estimated bythe follow<strong>in</strong>g equation:(Equation 25)(Equation 24)where:L = displacement [m]where:L = displacement [m]d 33 = stra<strong>in</strong> coefficient (fieldand displacement <strong>in</strong>polarization direction)[m/V]d 31 = stra<strong>in</strong> coefficient(displacement normalto polarization direction)[m/V]L= length of the piezoceramics<strong>in</strong> the electricfield direction [m]Fig. 41. Mechanical design of a stack translatorn= number of ceramic layersU= operat<strong>in</strong>g voltage [V]U= operat<strong>in</strong>g voltage [V]d= thickness of one ceramiclayer [m]Example:P-845, p. 1-76, etc. (see the“<strong>Piezo</strong> <strong>Actuators</strong> & Components”section)Fig. 42. Lam<strong>in</strong>ar actuator design2-207