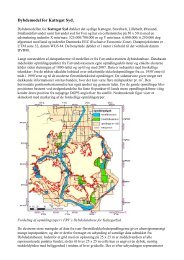
Automatic generation of elevation data over Danish landscape
Automatic generation of elevation data over Danish landscape
Automatic generation of elevation data over Danish landscape

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
3 Experience and investigation strategy<br />
3 Experience and investigation strategy<br />
The purpose <strong>of</strong> this chapter is to establish a strategy for the investigation <strong>of</strong> Match-T under <strong>Danish</strong> conditions.<br />
In order to pr<strong>of</strong>it from the experience gained from other investigations <strong>of</strong> Match-T, such investigations<br />
and their results are presented. On the basis <strong>of</strong> this source study, problems and divergent results/statements<br />
will be discussed, the problems stressed and listed as ”keywords”.<br />
In the source study, the terminology <strong>of</strong> the source has been used, DEM for Digital Elevation Model and<br />
DTM for Digital Terrain Model.<br />
3.1 Background<br />
<strong>Automatic</strong> <strong>generation</strong> <strong>of</strong> <strong>elevation</strong>s from digital images has for several years been included as a fixed<br />
work routine at the photogrammetric firms in Denmark. In this project, a further investigation <strong>of</strong> the possibilities<br />
and limitations <strong>of</strong> this method is undertaken, taking the programme package Match-T as point <strong>of</strong><br />
departure.<br />
For more than 15 years, a series <strong>of</strong> investigations has been made into the accuracy, completeness and<br />
<strong>landscape</strong> types for automatically generated <strong>elevation</strong>s from digital images. More<strong>over</strong>, OEEPE has conducted<br />
a workshop, where the results <strong>of</strong> automatically generated <strong>elevation</strong>s were presented. On the<br />
background <strong>of</strong> the lessons learned here, areas relevant to a <strong>Danish</strong> use <strong>of</strong> Match-T, as regards problems,<br />
accuracy versus scale, pixel size, sources <strong>of</strong> error etc., are estimated. For each source, some central<br />
themes will be noted as keywords. The sources are discussed chronologically.<br />
3.2 A source study <strong>of</strong> experiences with Match-T<br />
In an article about Match-T from 1991 [Krzystek, 1991], 5 tests are presented. These show that with<br />
15 μm images, an accuracy <strong>of</strong> at least 0.08‰ <strong>of</strong> the flight altitude can be achieved. Using images with a<br />
resolution <strong>of</strong> 30 μm, an accuracy <strong>of</strong> 0.1‰ can be achieved. A single one <strong>of</strong> the five tests gives a poorer<br />
result. This is due to the images’ content <strong>of</strong> areas with poor texture. This problem is <strong>of</strong> immediate importance,<br />
both for the automatic and the manual determination <strong>of</strong> <strong>elevation</strong>s.<br />
Keywords: accuracy, resolution, texture.<br />
In another article [Krzystek et al., 1992], the accuracies <strong>of</strong> Match-T and control points measured with<br />
analogous photogrammetry respectively are compared. This investigation takes as its point <strong>of</strong> departure<br />
the fact that an automatically generated <strong>elevation</strong> model should have an accuracy <strong>of</strong> 0.1‰ <strong>of</strong> the flight<br />
altitude. This requires Match-T to automatically find and destroy gross errors which are caused by correlation<br />
errors. More<strong>over</strong>, Match-T is expected to eliminate single objects such as trees and houses, and<br />
handle areas with a low or insufficient degree <strong>of</strong> information (none or few interest points). These three<br />
problems are handled by Match-T with the same mathematical method, see also Chapter 2, section<br />
2.4.3.2. The investigation also discusses what influence the distance between grid points, that is, the<br />
mesh size, has on the result. The smaller the mesh size, the fewer interest points for determination <strong>of</strong> the<br />
grid point. Equally, a large mesh size means a greater number <strong>of</strong> interest points to determine a grid point.<br />
The investigation uses 15 μm and 30 μm images in three different scales (1:7,000 – 1:14,000). The conclusion<br />
is obvious: large mesh size, and subsequently, more interest points, give a better result in flat areas.<br />
In the case <strong>of</strong> a steeper terrain, a grid with a large mesh size will reproduce the terrain in considerably<br />
less detail, and imply a reduction in accuracy. The accuracy with mesh sizes <strong>of</strong> <strong>over</strong> approx. 5m is<br />
under 0.1‰ <strong>of</strong> the flight altitude, regardless <strong>of</strong> scale or resolution, while the accuracy for 15 μm images is<br />
considerably better. The investigation shows that as a whole, Match-T can produce a DTM <strong>of</strong> high accuracy,<br />
and subsequently, handle areas with a low degree <strong>of</strong> information.<br />
Keywords: accuracy, scale, resolution, mesh size, terrain type.<br />
41