Multivariate Gaussianization for Data Processing
Multivariate Gaussianization for Data Processing
Multivariate Gaussianization for Data Processing

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
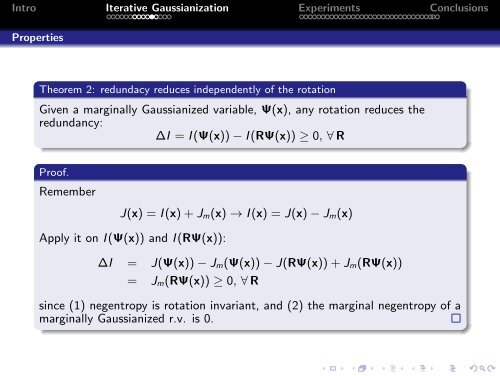
Intro Iterative <strong>Gaussianization</strong> Experiments ConclusionsPropertiesTheorem 2: redundacy reduces independently of the rotationGiven a marginally Gaussianized variable, Ψ(x), any rotation reduces theredundancy:∆I = I (Ψ(x)) − I (RΨ(x)) ≥ 0, ∀ RProof.RememberJ(x) = I (x) + J m(x) → I (x) = J(x) − J m(x)Apply it on I (Ψ(x)) and I (RΨ(x)):∆I = J(Ψ(x)) − J m(Ψ(x)) − J(RΨ(x)) + J m(RΨ(x))= J m(RΨ(x)) ≥ 0, ∀ Rsince (1) negentropy is rotation invariant, and (2) the marginal negentropy of amarginally Gaussianized r.v. is 0.