


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Projects<br />
SHOWCASE<br />
KRIS TEMMERMAN<br />
A freelance developer who creates<br />
interactive displays for museums<br />
and advertising agencies. He’s<br />
building a robot in his spare time.<br />
neuroproductions.be<br />
BALANCE<br />
BOT<br />
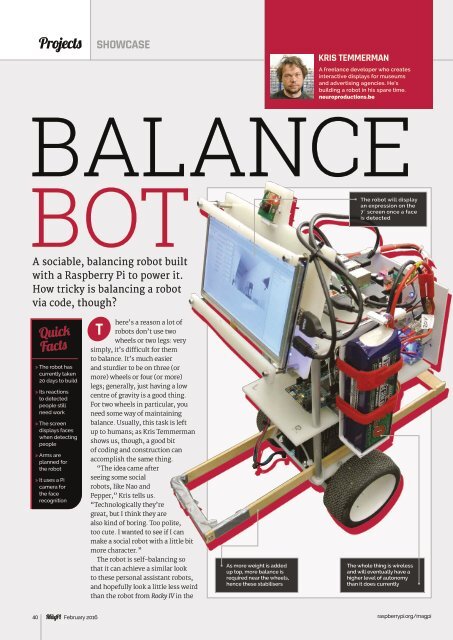
The robot will display<br />
an expression on the<br />
7˝ screen once a face<br />
is detected<br />
A sociable, balancing robot built<br />
with a Raspberry Pi to power it.<br />
How tricky is balancing a robot<br />
via code, though?<br />
Quick<br />
Facts<br />
> The robot has<br />
currently taken<br />
20 days to build<br />
> Its reactions<br />
to detected<br />
people still<br />
need work<br />
> The screen<br />
displays faces<br />
when detecting<br />
people<br />
> Arms are<br />
planned for<br />
the robot<br />
> It uses a Pi<br />
camera for<br />
the face<br />
recognition<br />
T<br />
here’s a reason a lot of<br />
robots don’t use two<br />
wheels or two legs: very<br />
simply, it’s difficult for them<br />
to balance. It’s much easier<br />
and sturdier to be on three (or<br />
more) wheels or four (or more)<br />
legs; generally, just having a low<br />
centre of gravity is a good thing.<br />
For two wheels in particular, you<br />
need some way of maintaining<br />
balance. Usually, this task is left<br />
up to humans; as Kris Temmerman<br />
shows us, though, a good bit<br />
of coding and construction can<br />
accomplish the same thing.<br />
“The idea came after<br />
seeing some social<br />
robots, like Nao and<br />
Pepper,” Kris tells us.<br />
“Technologically they’re<br />
great, but I think they are<br />
also kind of boring. Too polite,<br />
too cute. I wanted to see if I can<br />
make a social robot with a little bit<br />
more character.”<br />
The robot is self-balancing so<br />
that it can achieve a similar look<br />
to these personal assistant robots,<br />
and hopefully look a little less weird<br />
than the robot from Rocky IV in the<br />
As more weight is added<br />
up top, more balance is<br />
required near the wheels,<br />
hence these stabilisers<br />
The whole thing is wireless<br />
and will eventually have a<br />
higher level of autonomy<br />
than it does currently<br />
40 February 2016<br />
raspberrypi.org/magpi