DCN May Edition 2019

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Visco ; Colin Biggers & Paisley<br />
not necessarily depend upon the extent<br />
to which any crewman may or not be<br />
on-board”.<br />
The practical difficulties involved in<br />
amending each and every convention<br />
to have proper regard to safety when it<br />
comes to unmanned ships are evident. Sir<br />
Bernard Eder said an alternative may be<br />
to create “some overarching instrument<br />
along the lines perhaps of the Polar Code”,<br />
and new definitions for generic words<br />
such as “master” could be considered.<br />
While the focus of legal reform inevitably<br />
must be on safety, Sir Bernard Eder said<br />
it should not be overlooked that legal<br />
liability conventions also may need to be<br />
considered. Due diligence is something the<br />
courts will have to give consideration to<br />
in relation to questions of seaworthiness.<br />
Whether an owner has complied with its<br />
duties of due diligence in, for example, the<br />
carriage of goods liability regimes will be<br />
challenging in the context of MASS.<br />
Other industry leaders offered their<br />
views at the CMI Assembly during<br />
a workshop entitled The Challenging<br />
Convergence of Modern Technology,<br />
Cybercrime and Marine Insurance. Robert<br />
Veal from Southampton University<br />
questioned whether a more significant<br />
role for product or manufacturers’<br />
liability insurers concerning autonomous<br />
technology is necessary.<br />
International maritime lawyer Dr<br />
Lina Wiedenbach questioned whether<br />
the present fault-based liability regime<br />
in the Collision Regulations may have to<br />
be reassessed in the light of autonomous<br />
vessels. She queried whether there might<br />
have to be a shift from considering<br />
negligence in navigation to negligence in<br />
management.<br />
Dr Wiedenbach suggested that vicarious<br />
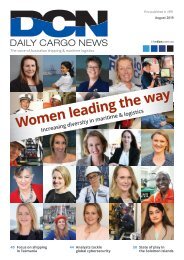
LEVELS OF AUTONOMY<br />
Yara Birkeland is a fully autonomous and electric cargo solution<br />
liability principles for independent<br />
contractors should be applied to operators<br />
of MASS; and that it might be necessary<br />
to extend the circle of persons for whose<br />
fault ship owners might be liable, creating a<br />
regime of strict liability for MASS.<br />
MARITIME SAFETY COMMITTEE<br />
FRAMEWORK<br />
In December 2018, the MSC approved<br />
the framework and methodology for the<br />
regulatory scoping exercise, which it had<br />
agreed to undertake in 2017. In effect,<br />
for each instrument related to maritime<br />
safety and security and for each degree of<br />
autonomy provisions are to be identified<br />
which apply to MASS and prevent MASS<br />
operation, or; apply to MASS and do not<br />
prevent MASS operations and require<br />
no action, or; apply to MASS and do not<br />
prevent MASS operations but may need<br />
to be amended or clarified, and/or may<br />
contain gaps, or; have no application to<br />
MASS operation.<br />
It was also decided that once the first<br />
step has been completed, the second step<br />
The Maritime Safety Committee has identified four degrees of autonomy. They<br />
are defined as follows:<br />
DEGREE 1: Ships with automated processes and decision support - seafarers are<br />
on board to operate and control ship port systems and functions. Some operations<br />
may be automated and at times be unsupervised but with seafarers on board ready<br />
to take control.<br />
DEGREE 2: Remotely controlled ship with seafarers on-board - the ship is controlled<br />
and operated from another location. Seafarers are available on-board to take<br />
control and to operate the ship board systems and functions.<br />
DEGREE 3: Remotely controlled ship without seafarers on-board - the ship is<br />
controlled and operated from another location. There are no seafarers on-board.<br />
DEGREE 4: Fully autonomous ship - the operating system of the ship is able to make<br />
decisions and determine actions by itself.<br />
will be to analyse and determine the most<br />
appropriate way of addressing MASS,<br />
taking into account the human element,<br />
technology and operational factors. The<br />
analysis will identify the need for:<br />
• Equivalences as provided for by<br />
the instruments or developing<br />
interpretations, and/or;<br />
Amending existing instruments, and/or;<br />
Developing new instruments, or;<br />
• None of the above as the result of the<br />
analysis.<br />
The instruments to be covered in the<br />
MSC scoping exercise for MASS includes:<br />
SOLAS, COLREG, Load Lines (loading<br />
and stability), STCW, STCW-F (training<br />
of seafarers and fishers), SAR, Tonnage<br />
Convention, CSC (safe containers) and STP<br />
(special trade passenger ships).<br />
ARE AUSTRALIA’S LAWS FIT FOR<br />
PURPOSE?<br />
The challenges for MASS do not only<br />
involve international regulatory bodies.<br />
The problems come much closer to home,<br />
when consideration is given to local<br />
legislation dealing with safety, manning,<br />
and operation of ships.<br />
While the definitions of “ships”<br />
and “vessels” in both federal and state<br />
legislation may be broad enough to<br />
encompass autonomous vessels, the<br />
more difficult question is whether the<br />
laws that are in force in national or state<br />
legislation relating to the operation,<br />
manning or safety features of such vessels<br />
are fit for purpose. Clearly at the time of<br />
enactment most such provisions did not<br />
have unmanned or autonomous ships in<br />
contemplation, let alone partly manned<br />
or partly autonomous. There is still much<br />
work to be done by regulators.<br />
thedcn.com.au <strong>May</strong> <strong>2019</strong> 55