
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
worldmags<br />
www.servomagazine.com/index.php?/magazine/article/december2010_GeerHead<br />
The researchers manufacture the nanofabric in a<br />
manner similar to the process of producing wood-based<br />
paper. Because the material can separate many other types<br />
of elements <strong>and</strong> compounds from water, users can apply it<br />
to many types of water clean-up scenarios.<br />
Light It Up<br />
The environment’s powerful new robot ally rids oil by<br />
one of three methods, actually still under development. The<br />
most likely method is simply burning it off as the fabric<br />
passes through a heat chamber in the head of the robot.<br />
Researchers construct the fabric with potassium manganese<br />
oxide-based nanowires that easily survive temperatures<br />
above oil’s boiling point. The oil evaporates quickly as a<br />
result, according to Adam Pruden, a seaswarm<br />
representative. With the burning method, the material<br />
could stay in the water in continual use for weeks at a time.<br />
Alternate oil processing methods under consideration<br />
include digestion by microorganisms or squeezing the oil<br />
out of the nanofabric <strong>and</strong> bagging it for later retrieval.<br />
Researchers power the seaswarm robots using solar<br />
cells on top of the head of the robot. Solar panels two<br />
meters by two meters covering each robotic head could<br />
supply the 300W of power necessary to run the bot. With<br />
this amount of power, the robot could do all its processing<br />
<strong>and</strong> move through the water at a rate of 10 kilometers<br />
per hour.<br />
The robot could even store surplus energy in its<br />
onboard batteries so the robot could continue to move <strong>and</strong><br />
process oil throughout the dark hours of the night. As solar<br />
cells become more powerful in coming years, researchers<br />
could make the seaswarm power scenario more efficient.<br />
Sensing <strong>and</strong> Communications<br />
Seaswarm robots work together, <strong>and</strong> for that they<br />
need a communications modality. The robots are completely<br />
autonomous <strong>and</strong> use a variety of sensor technologies to<br />
attend to all their duties. The robots count on precise oil<br />
spill location images sent from satellites via Wi-Fi, as well as<br />
their own onboard sensors to locate the oil. They count on<br />
onboard GPS to tell themselves <strong>and</strong> each other where each<br />
robot is located in relation to the others. The robots sense<br />
their water bound surroundings as a group rather than<br />
individually. In this way, the sensing capabilities of all the<br />
robots combine to tell each robot where to go. The robots<br />
also send images they take using onboard cameras as<br />
streaming video back to the scientists via the web.<br />
The robots intelligence — comprised of very mature<br />
algorithms — works to coordinate the search patterns the<br />
robots use to find the oil. The robots can tell the oil apart<br />
from other matter by sharing sensor data. To do this, the<br />
next seaswarm prototype may use any of the following<br />
sensing options: Garmin USB (GPS), Pontech (embedded<br />
controllers), Seiko PS 050 (servos), fit-PC2 (computer),<br />
Arduino (boards), or MOOS (software).<br />
Clean-Up<br />
In an actual clean-up scenario, the robots would start<br />
at the outer edge of a spill location <strong>and</strong> move inward until<br />
all the oil is cleaned from that site. They would then move<br />
on to the next spill site <strong>and</strong> follow the same protocol.<br />
Robot Snakes<br />
GEERHEAD<br />
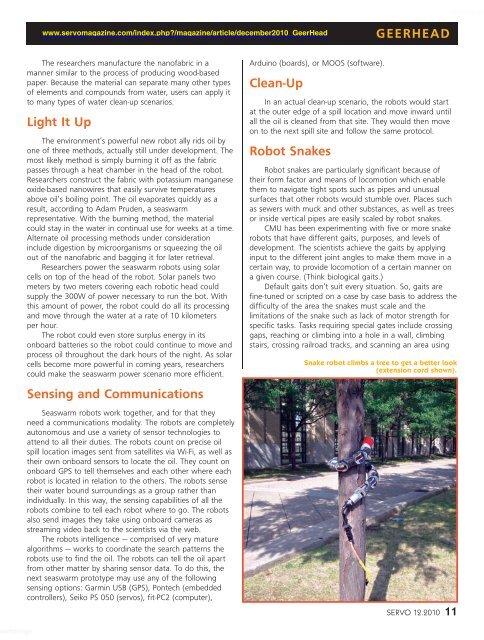
Robot snakes are particularly significant because of<br />
their form factor <strong>and</strong> means of locomotion which enable<br />
them to navigate tight spots such as pipes <strong>and</strong> unusual<br />
surfaces that other robots would stumble over. Places such<br />
as sewers with muck <strong>and</strong> other substances, as well as trees<br />
or inside vertical pipes are easily scaled by robot snakes.<br />
CMU has been experimenting with five or more snake<br />
robots that have different gaits, purposes, <strong>and</strong> levels of<br />
development. The scientists achieve the gaits by applying<br />
input to the different joint angles to make them move in a<br />
certain way, to provide locomotion of a certain manner on<br />
a given course. (Think biological gaits.)<br />
Default gaits don’t suit every situation. So, gaits are<br />
fine-tuned or scripted on a case by case basis to address the<br />
difficulty of the area the snakes must scale <strong>and</strong> the<br />
limitations of the snake such as lack of motor strength for<br />
specific tasks. Tasks requiring special gates include crossing<br />
gaps, reaching or climbing into a hole in a wall, climbing<br />
stairs, crossing railroad tracks, <strong>and</strong> scanning an area using<br />
Snake robot climbs a tree to get a better look<br />
(extension cord shown).<br />
SERVO 12.2010 11<br />
worldmags