to get the file - OCW UPM
to get the file - OCW UPM
to get the file - OCW UPM

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
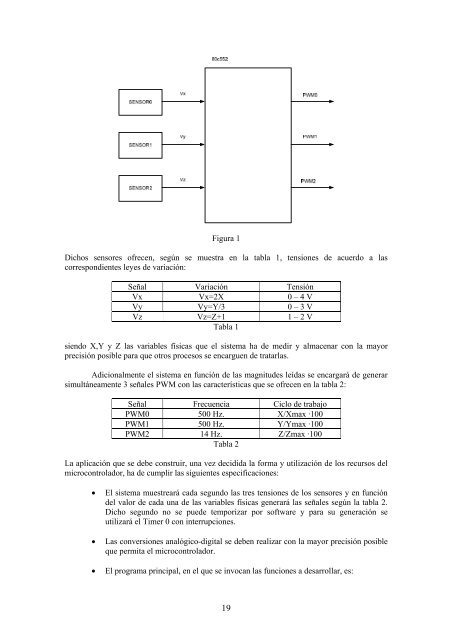
Figura 1<br />
Dichos sensores ofrecen, según se muestra en la tabla 1, tensiones de acuerdo a las<br />
correspondientes leyes de variación:<br />
Señal Variación Tensión<br />
Vx Vx=2X 0 – 4 V<br />
Vy Vy=Y/3 0 – 3 V<br />
Vz Vz=Z+1 1 – 2 V<br />
Tabla 1<br />
siendo X,Y y Z las variables físicas que el sistema ha de medir y almacenar con la mayor<br />
precisión posible para que otros procesos se encarguen de tratarlas.<br />
Adicionalmente el sistema en función de las magnitudes leídas se encargará de generar<br />
simultáneamente 3 señales PWM con las características que se ofrecen en la tabla 2:<br />
Señal Frecuencia Ciclo de trabajo<br />
PWM0 500 Hz. X/Xmax ·100<br />
PWM1 500 Hz. Y/Ymax ·100<br />
PWM2 14 Hz. Z/Zmax ·100<br />
Tabla 2<br />
La aplicación que se debe construir, una vez decidida la forma y utilización de los recursos del<br />
microcontrolador, ha de cumplir las siguientes especificaciones:<br />
• El sistema muestreará cada segundo las tres tensiones de los sensores y en función<br />
del valor de cada una de las variables físicas generará las señales según la tabla 2.<br />
Dicho segundo no se puede temporizar por software y para su generación se<br />
utilizará el Timer 0 con interrupciones.<br />
• Las conversiones analógico-digital se deben realizar con la mayor precisión posible<br />
que permita el microcontrolador.<br />
• El programa principal, en el que se invocan las funciones a desarrollar, es:<br />
19