

Universidad de Carabobo Autoridades
vol23n32016
vol23n32016

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Anna Patete y Amilcar Erazo / Revista Ingeniería UC , Vol. 23, No. 3, Diciembre 2016, 247-259 257<br />
Tomamos x 2 = Φ (x 1 ) = −x 1 y se propone como<br />
función candidata a Lyapunov representada por la<br />
ecuación (27), cuya <strong>de</strong>rivada es <strong>de</strong>finida negativa<br />
como se muestra en la ecuación (28).<br />
V = − 1 2 x2 1 (27)<br />
˙V (x 1 ) ≤ − x 2 1 (28)<br />
Por lo que el control Backstepping para el<br />
sistema (26) es dado por la ecuación (29),<br />
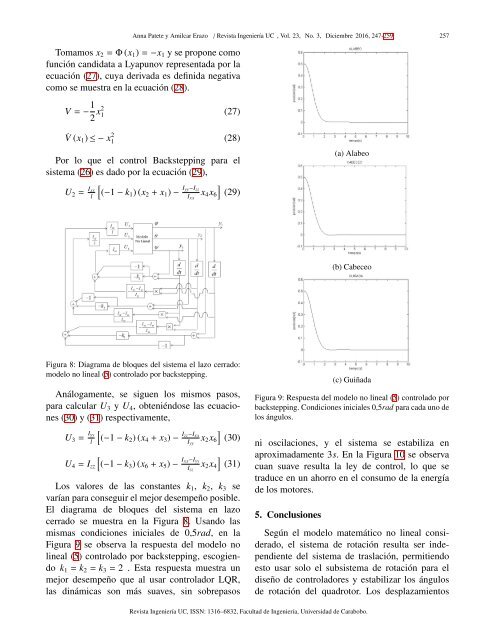
(a) Alabeo<br />
U 2 = I xx<br />
l<br />
[<br />
(−1 − k1 ) (x 2 + x 1 ) − I yy−I zz<br />
I xx<br />
x 4 x 6<br />
]<br />
(29)<br />
(b) Cabeceo<br />
Figura 8: Diagrama <strong>de</strong> bloques <strong>de</strong>l sistema el lazo cerrado:<br />
mo<strong>de</strong>lo no lineal (5) controlado por backstepping.<br />
Análogamente, se siguen los mismos pasos,<br />
para calcular U 3 y U 4 , obteniéndose las ecuaciones<br />
(30) y (31) respectivamente,<br />
U 3 = I yy<br />
l<br />
[<br />
(−1 − k2 ) (x 4 + x 3 ) − I zz−I xx<br />
I yy<br />
x 2 x 6<br />
]<br />
(30)<br />
U 4 = I zz<br />
[<br />
(−1 − k3 ) (x 6 + x 5 ) − I xx−I yy<br />
I zz<br />
x 2 x 4<br />
]<br />
(31)<br />
Los valores <strong>de</strong> las constantes k 1 , k 2 , k 3 se<br />
varían para conseguir el mejor <strong>de</strong>sempeño posible.<br />
El diagrama <strong>de</strong> bloques <strong>de</strong>l sistema en lazo<br />
cerrado se muestra en la Figura 8. Usando las<br />
mismas condiciones iniciales <strong>de</strong> 0,5rad, en la<br />
Figura 9 se observa la respuesta <strong>de</strong>l mo<strong>de</strong>lo no<br />
lineal (5) controlado por backstepping, escogiendo<br />
k 1 = k 2 = k 3 = 2 . Esta respuesta muestra un<br />
mejor <strong>de</strong>sempeño que al usar controlador LQR,<br />
las dinámicas son más suaves, sin sobrepasos<br />
(c) Guiñada<br />
Figura 9: Respuesta <strong>de</strong>l mo<strong>de</strong>lo no lineal (5) controlado por<br />
backstepping. Condiciones iniciales 0,5rad para cada uno <strong>de</strong><br />
los ángulos.<br />
ni oscilaciones, y el sistema se estabiliza en<br />
aproximadamente 3s. En la Figura 10 se observa<br />
cuan suave resulta la ley <strong>de</strong> control, lo que se<br />
traduce en un ahorro en el consumo <strong>de</strong> la energía<br />
<strong>de</strong> los motores.<br />
5. Conclusiones<br />
Según el mo<strong>de</strong>lo matemático no lineal consi<strong>de</strong>rado,<br />
el sistema <strong>de</strong> rotación resulta ser in<strong>de</strong>pendiente<br />
<strong>de</strong>l sistema <strong>de</strong> traslación, permitiendo<br />
esto usar solo el subsistema <strong>de</strong> rotación para el<br />
diseño <strong>de</strong> controladores y estabilizar los ángulos<br />
<strong>de</strong> rotación <strong>de</strong>l quadrotor. Los <strong>de</strong>splazamientos<br />
Revista Ingeniería UC, ISSN: 1316–6832, Facultad <strong>de</strong> Ingeniería, <strong>Universidad</strong> <strong>de</strong> <strong>Carabobo</strong>.


