teknik pemeliharaan dan perbaikan sistem elektronika jilid 2 smk
teknik pemeliharaan dan perbaikan sistem elektronika jilid 2 smk
teknik pemeliharaan dan perbaikan sistem elektronika jilid 2 smk

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Pelacakan Kerusakan Alat Kontrol Industri<br />
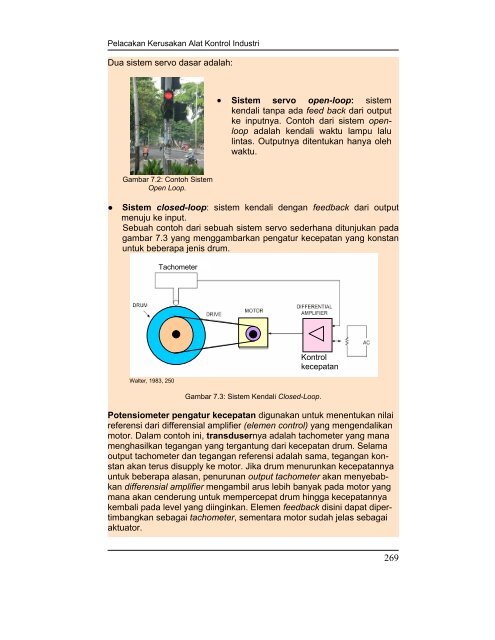
Dua <strong>sistem</strong> servo dasar adalah:<br />
Gambar 7.2: Contoh Sistem<br />
Open Loop.<br />
● Sistem closed-loop: <strong>sistem</strong> kendali dengan feedback dari output<br />
menuju ke input.<br />
Sebuah contoh dari sebuah <strong>sistem</strong> servo sederhana ditunjukan pada<br />
gambar 7.3 yang menggambarkan pengatur kecepatan yang konstan<br />
untuk beberapa jenis drum.<br />
Walter, 1983, 250<br />
Tachometer<br />
• Sistem servo open-loop: <strong>sistem</strong><br />
kendali tanpa ada feed back dari output<br />
ke inputnya. Contoh dari <strong>sistem</strong> openloop<br />
adalah kendali waktu lampu lalu<br />
lintas. Outputnya ditentukan hanya oleh<br />
waktu.<br />
Kontrol<br />
kecepatan<br />
Gambar 7.3: Sistem Kendali Closed-Loop.<br />
Potensiometer pengatur kecepatan digunakan untuk menentukan nilai<br />
referensi dari differensial amplifier (elemen control) yang mengendalikan<br />
motor. Dalam contoh ini, transdusernya adalah tachometer yang mana<br />
menghasilkan tegangan yang tergantung dari kecepatan drum. Selama<br />
output tachometer <strong>dan</strong> tegangan referensi adalah sama, tegangan konstan<br />
akan terus disupply ke motor. Jika drum menurunkan kecepatannya<br />
untuk beberapa alasan, penurunan output tachometer akan menyebabkan<br />
differensial amplifier mengambil arus lebih banyak pada motor yang<br />
mana akan cenderung untuk mempercepat drum hingga kecepatannya<br />
kembali pada level yang diinginkan. Elemen feedback disini dapat dipertimbangkan<br />
sebagai tachometer, sementara motor sudah jelas sebagai<br />
aktuator.<br />
269