Jurnal Teknobiologi, 1(1) - perpustakaan universitas riau
Jurnal Teknobiologi, 1(1) - perpustakaan universitas riau
Jurnal Teknobiologi, 1(1) - perpustakaan universitas riau
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
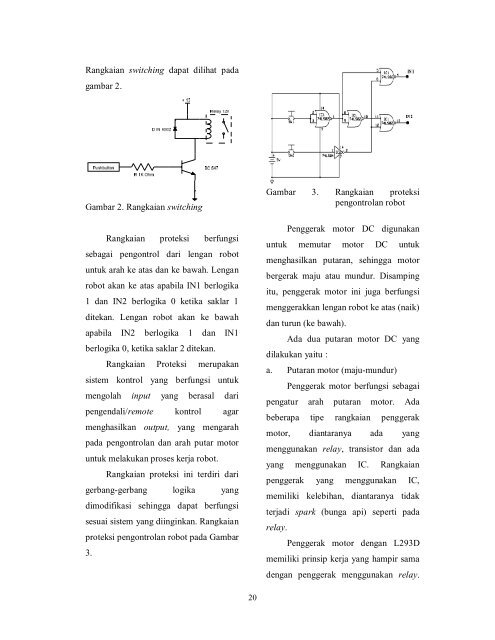
Rangkaian switching dapat dilihat padagambar 2.Gambar 2. Rangkaian switchingRangkaian proteksi berfungsisebagai pengontrol dari lengan robotuntuk arah ke atas dan ke bawah. Lenganrobot akan ke atas apabila IN1 berlogika1 dan IN2 berlogika 0 ketika saklar 1ditekan. Lengan robot akan ke bawahapabila IN2 berlogika 1 dan IN1berlogika 0, ketika saklar 2 ditekan.Rangkaian Proteksi merupakansistem kontrol yang berfungsi untukmengolah input yang berasal daripengendali/remote kontrol agarmenghasilkan output, yang mengarahpada pengontrolan dan arah putar motoruntuk melakukan proses kerja robot.Rangkaian proteksi ini terdiri darigerbang-gerbang logika yangdimodifikasi sehingga dapat berfungsisesuai sistem yang diinginkan. Rangkaianproteksi pengontrolan robot pada Gambar3.Gambar 3. Rangkaian proteksipengontrolan robotPenggerak motor DC digunakanuntuk memutar motor DC untukmenghasilkan putaran, sehingga motorbergerak maju atau mundur. Disampingitu, penggerak motor ini juga berfungsimenggerakkan lengan robot ke atas (naik)dan turun (ke bawah).Ada dua putaran motor DC yangdilakukan yaitu :a. Putaran motor (maju-mundur)Penggerak motor berfungsi sebagaipengatur arah putaran motor. Adabeberapa tipe rangkaian penggerakmotor, diantaranya ada yangmenggunakan relay, transistor dan adayang menggunakan IC. Rangkaianpenggerak yang menggunakan IC,memiliki kelebihan, diantaranya tidakterjadi spark (bunga api) seperti padarelay.Penggerak motor dengan L293Dmemiliki prinsip kerja yang hampir samadengan penggerak menggunakan relay.20