

2.3 Relaxatie-oscillator
2.3 Relaxatie-oscillator
2.3 Relaxatie-oscillator

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
geven. Als de inverter ook voldoende versterkt, is aan de Barkhausencriteria voldaan en zal de <strong>oscillator</strong><br />
een harmonisch signaal opwekken 5 .<br />
Vaak wordt in de literatuur niet over de looptijdvertraging gesproken en neemt men aan dat de condensater<br />
C 1 een fasedraaiing van -90° geeft, en het kristal (de sensor) samen met C 2 voor de resterende<br />
-90° zorgt. Deze voorstelling is niet correct.<br />
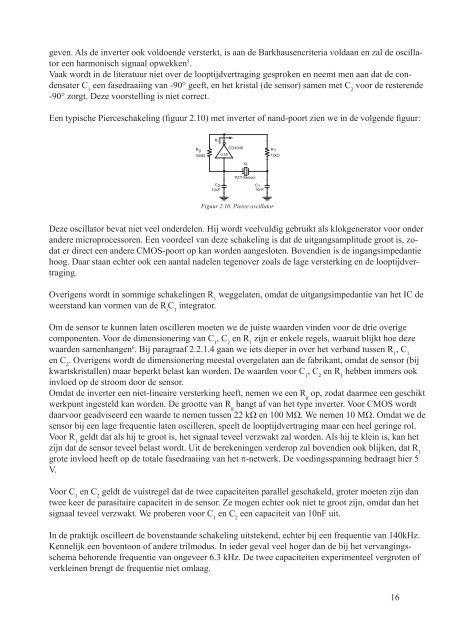
Een typische Pierceschakeling (figuur 2.10) met inverter of nand-poort zien we in de volgende figuur:<br />
Rg<br />
10MΩ<br />
Ri<br />
C2<br />
10nF<br />
U1A<br />
CD4049<br />
X1<br />
PZT-Sensor<br />
C1<br />
10nF<br />
Figuur 2.10. Pierce <strong>oscillator</strong><br />
Deze <strong>oscillator</strong> bevat niet veel onderdelen. Hij wordt veelvuldig gebruikt als klokgenerator voor onder<br />
andere microprocessoren. Een voordeel van deze schakeling is dat de uitgangsamplitude groot is, zodat<br />
er direct een andere CMOS-poort op kan worden aangesloten. Bovendien is de ingangsimpedantie<br />
hoog. Daar staan echter ook een aantal nadelen tegenover zoals de lage versterking en de looptijdvertraging.<br />
Overigens wordt in sommige schakelingen R 1 weggelaten, omdat de uitgangsimpedantie van het IC de<br />
weerstand kan vormen van de R i C 1 integrator.<br />
Om de sensor te kunnen laten oscilleren moeten we de juiste waarden vinden voor de drie overige<br />
componenten. Voor de dimensionering van C 1 , C 2 en R 1 zijn er enkele regels, waaruit blijkt hoe deze<br />
waarden samenhangen 6 . Bij paragraaf 2.2.1.4 gaan we iets dieper in over het verband tussen R 1 , C 1<br />
en C 2 . Overigens wordt de dimensionering meestal overgelaten aan de fabrikant, omdat de sensor (bij<br />
kwartskristallen) maar beperkt belast kan worden. De waarden voor C 1 , C 2 en R 1 hebben immers ook<br />
invloed op de stroom door de sensor.<br />
Omdat de inverter een niet-lineaire versterking heeft, nemen we een R g op, zodat daarmee een geschikt<br />
werkpunt ingesteld kan worden. De grootte van R g hangt af van het type inverter. Voor CMOS wordt<br />
daarvoor geadviseerd een waarde te nemen tussen 22 kΩ en 100 MΩ. We nemen 10 MΩ. Omdat we de<br />
sensor bij een lage frequentie laten oscilleren, speelt de looptijdvertraging maar een heel geringe rol.<br />
Voor R 1 geldt dat als hij te groot is, het signaal teveel verzwakt zal worden. Als hij te klein is, kan het<br />
zijn dat de sensor teveel belast wordt. Uit de berekeningen verderop zal bovendien ook blijken, dat R 1<br />
grote invloed heeft op de totale fasedraaiing van het -netwerk. De voedingsspanning bedraagt hier 5<br />
V.<br />
Voor C 1 en C 2 geldt de vuistregel dat de twee capaciteiten parallel geschakeld, groter moeten zijn dan<br />
twee keer de parasitaire capaciteit in de sensor. Ze mogen echter ook niet te groot zijn, omdat dan het<br />
signaal teveel verzwakt. We proberen voor C 1 en C 2 een capaciteit van 10nF uit.<br />
In de praktijk oscilleert de bovenstaande schakeling uitstekend, echter bij een frequentie van 140kHz.<br />
Kennelijk een boventoon of andere trilmodus. In ieder geval veel hoger dan de bij het vervangingsschema<br />
behorende frequentie van ongeveer 6.3 kHz. De twee capaciteiten experimenteel vergroten of<br />
verkleinen brengt de frequentie niet omlaag.<br />
R1<br />
12kΩ<br />
16