

2.3 Relaxatie-oscillator
2.3 Relaxatie-oscillator
2.3 Relaxatie-oscillator

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
400<br />
390<br />
380<br />
370<br />
360<br />
350<br />
340<br />
330<br />
0 10 20 30 40<br />
<br />
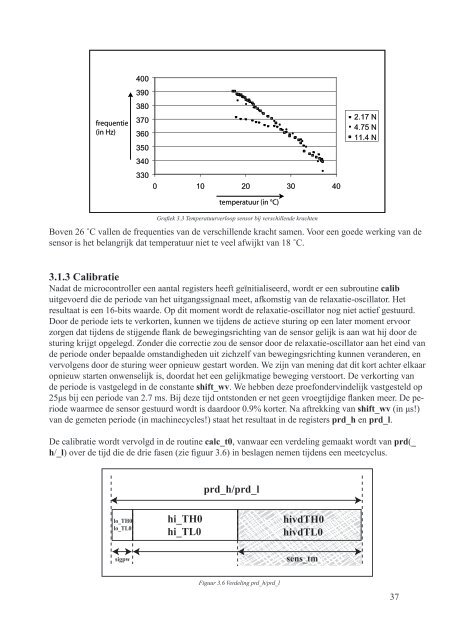
Grafiek 3.3 Temperatuurverloop sensor bij verschillende krachten<br />
2.17 N<br />
4.75 N<br />
11.4 N<br />
Boven 26 ˚C vallen de frequenties van de verschillende kracht samen. Voor een goede werking van de<br />
sensor is het belangrijk dat temperatuur niet te veel afwijkt van 18 ˚C.<br />
3.1.3 Calibratie<br />
Nadat de microcontroller een aantal registers heeft geïnitialiseerd, wordt er een subroutine calib<br />
uitgevoerd die de periode van het uitgangssignaal meet, afkomstig van de relaxatie-<strong>oscillator</strong>. Het<br />
resultaat is een 16-bits waarde. Op dit moment wordt de relaxatie-<strong>oscillator</strong> nog niet actief gestuurd.<br />
Door de periode iets te verkorten, kunnen we tijdens de actieve sturing op een later moment ervoor<br />
zorgen dat tijdens de stijgende flank de bewegingsrichting van de sensor gelijk is aan wat hij door de<br />
sturing krijgt opgelegd. Zonder die correctie zou de sensor door de relaxatie-<strong>oscillator</strong> aan het eind van<br />
de periode onder bepaalde omstandigheden uit zichzelf van bewegingsrichting kunnen veranderen, en<br />
vervolgens door de sturing weer opnieuw gestart worden. We zijn van mening dat dit kort achter elkaar<br />
opnieuw starten onwenselijk is, doordat het een gelijkmatige beweging verstoort. De verkorting van<br />
de periode is vastgelegd in de constante shift_wv. We hebben deze proefondervindelijk vastgesteld op<br />
25μs bij een periode van 2.7 ms. Bij deze tijd ontstonden er net geen vroegtijdige flanken meer. De periode<br />
waarmee de sensor gestuurd wordt is daardoor 0.9% korter. Na aftrekking van shift_wv (in μs!)<br />
van de gemeten periode (in machinecycles!) staat het resultaat in de registers prd_h en prd_l.<br />
De calibratie wordt vervolgd in de routine calc_t0, vanwaar een verdeling gemaakt wordt van prd(_<br />
h/_l) over de tijd die de drie fasen (zie figuur 3.6) in beslagen nemen tijdens een meetcyclus.<br />
lo_TH0<br />
lo_TL0<br />
sigpw<br />
hi_TH0<br />
hi_TL0<br />
prd_h/prd_l<br />
Figuur 3.6 Verdeling prd_h/prd_l<br />
hivdTH0<br />
hivdTL0<br />
sens_tm<br />
37