Metode matematice de optimizare. Metoda aproximÄrii cu funcÅ£ii ...
Metode matematice de optimizare. Metoda aproximÄrii cu funcÅ£ii ...
Metode matematice de optimizare. Metoda aproximÄrii cu funcÅ£ii ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
C6. <strong>Meto<strong>de</strong></strong> <strong>matematice</strong> <strong>de</strong> <strong>optimizare</strong>. <strong>Metoda</strong> aproximării <strong>cu</strong><br />
funcŃii polinomiale. <strong>Metoda</strong> gradientului funcŃiei obiectiv. Rolul<br />
tehnicilor <strong>de</strong> generare şi baleiere în domeniul variabilelor <strong>de</strong><br />
proiectare pentru obŃinerea unei soluŃii <strong>de</strong> start. Aspecte numerice<br />
fundamentale, convergenŃă, criterii <strong>de</strong> căutare, etc<br />
6.1. Introducere<br />
Scopul acestui capitol este <strong>de</strong> a prezenta câteva concepte generale privind<br />
<strong>optimizare</strong>a şi în parti<strong>cu</strong>lar <strong>optimizare</strong>a structurilor. <strong>Meto<strong>de</strong></strong> analitice şi numerice ca şi<br />
SOLUłIA<br />
INIłIALĂ<br />
CERINłE<br />
SATISFĂCUTE<br />
?<br />
NU<br />
MODIFICAREA<br />
SOLUłIEI<br />
IMBUNĂTĂłIRI<br />
?<br />
NU<br />
SOLUłIA<br />
FINALĂ<br />
DA<br />
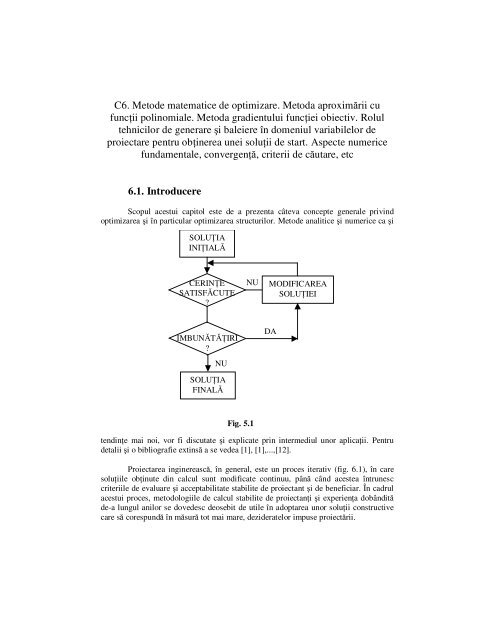
Fig. 5.1<br />
tendinŃe mai noi, vor fi dis<strong>cu</strong>tate şi explicate prin intermediul unor aplicaŃii. Pentru<br />
<strong>de</strong>talii şi o bibliografie extinsă a se ve<strong>de</strong>a [1], [1],...,[12].<br />
Proiectarea inginerească, în general, este un proces iterativ (fig. 6.1), în care<br />
soluŃiile obŃinute din cal<strong>cu</strong>l sunt modificate continuu, până când acestea întrunesc<br />
criteriile <strong>de</strong> evaluare şi acceptabilitate stabilite <strong>de</strong> proiectant şi <strong>de</strong> beneficiar. În cadrul<br />
acestui proces, metodologiile <strong>de</strong> cal<strong>cu</strong>l stabilite <strong>de</strong> proiectanŃi şi experienŃa dobândită<br />
<strong>de</strong>-a lungul anilor se dove<strong>de</strong>sc <strong>de</strong>osebit <strong>de</strong> utile în adoptarea unor soluŃii constructive<br />
care să corespundă în măsură tot mai mare, <strong>de</strong>zi<strong>de</strong>ratelor impuse proiectării.
Parametrii funcŃionali (presiunea, temperatura, viteza etc.) tot mai ridicaŃi, la<br />
care trebuie să lucreze o serie <strong>de</strong> utilaje şi echipamente din industria <strong>de</strong> proces şi din<br />
energetica nucleară, ca şi condiŃiile dure <strong>de</strong> funcŃionare (încărcarea şi viteza), întâlnite<br />
în exploatarea unor mijloace <strong>de</strong> transport rutiere, pe calea ferată şi aero-spaŃiale, impun<br />
realizarea unor structuri <strong>de</strong> rezistenŃă complexe, care să confere durabilitate maximă,<br />
şi siguranŃă sporită în exploatare, în condiŃiile unor consumuri minime <strong>de</strong> material şi<br />
manoperă.<br />
Proiectarea unor astfel <strong>de</strong> structuri pentru care se impun soluŃii al căror nivel<br />
<strong>de</strong> complexitate <strong>de</strong>păşeşte <strong>cu</strong> mult posibilităŃile oferite <strong>de</strong> metodologiile tradiŃionale <strong>de</strong><br />
proiectare, se face în prezent <strong>cu</strong> ajutorul unor programe <strong>de</strong> cal<strong>cu</strong>l specializate, care<br />
pornind <strong>de</strong> la caracteristicile mecanice ale materialului şi a sarcinilor exterioare,<br />
<strong>de</strong>termină în final atât configuraŃia şi dimensiunile optime, cât şi comportamentul<br />
mecanic al structurii.<br />
GEOMETRIE,<br />
DISCRETIZARE,<br />
ANALIZĂ<br />
DEFINIREA<br />
PARAMETRILOR<br />
DE OPTIMIZARE<br />
GEOMETRIE<br />
DISCRETIZARE<br />
ANALIZĂ<br />
APROXIMAłII<br />
ŞI<br />
OPTIMIZARE<br />
POSTPROCESARE<br />
DA<br />
ESTE<br />
CONVERGENTĂ<br />
REALIZ.<br />
?<br />
NU<br />
BUCLĂ DE OPTIMIZARE<br />
Fig. 5.2<br />
Proiectarea optimală a structurilor <strong>de</strong> maşini reprezintă un proces <strong>de</strong> cal<strong>cu</strong>l<br />
bazat pe un ansamblu <strong>de</strong> meto<strong>de</strong> <strong>matematice</strong> <strong>de</strong> <strong>optimizare</strong>, formulate prin<br />
aprofundarea unor concepte ale teoriei elasticităŃii şi plasticităŃii sistemelor<br />
<strong>de</strong>formabile, sub forma unor algoritmi <strong>de</strong> cal<strong>cu</strong>l. Folosind mo<strong>de</strong>larea structurală liniară<br />
şi neliniară, aceşti algoritmi <strong>de</strong> minimizare (maximizare) sunt transpuşi în programe <strong>de</strong><br />
cal<strong>cu</strong>l, care prin introducerea unor criterii privind nivelul tensiunilor şi rigidităŃii, sau<br />
<strong>de</strong> minimizare a greutăŃii proprii, a cheltuielilor <strong>de</strong> fabricaŃie etc., se constituie în
metodologii mo<strong>de</strong>rne <strong>de</strong> proiectare a unor structuri optimizate fundamentale pe baze<br />
noi, mai apropiate <strong>de</strong> realitate.<br />
În cal<strong>cu</strong>lele <strong>de</strong> <strong>optimizare</strong> structurală se consi<strong>de</strong>ră că mo<strong>de</strong>lul <strong>de</strong> analiză prin<br />
cal<strong>cu</strong>l a structurii este stabilit, iar <strong>optimizare</strong>a propriu-zisă, reprezentând o serie <strong>de</strong><br />
meto<strong>de</strong> şi tehnici <strong>de</strong> cal<strong>cu</strong>l, operează asupra mo<strong>de</strong>lului structurii, conducând în final la<br />
<strong>optimizare</strong>a formei şi dimensiunilor acesteia. Prin urmare, <strong>optimizare</strong>a structurală în<br />
proiectarea inginerească este un proces <strong>de</strong> cal<strong>cu</strong>l prin care se <strong>de</strong>fineşte un anumit<br />
sistem (structura) sub aspectul formei şi dimensiunilor, în timp ce prin analiza<br />
structurală se urmăreşte <strong>de</strong>terminarea răspunsului mo<strong>de</strong>lului unui sistem (structură),<br />
supus acŃiunii unor încărcări exterioare.<br />
Procesul <strong>de</strong> proiectare a unei structuri optimale poate fi reprezentat sugestiv <strong>cu</strong><br />
ajutorul schemei din figura 6.2.<br />
Proiectarea optimală a structurilor reprezintă un proces <strong>de</strong> reproiectare<br />
automată prin care se încearcă minimizarea sau maximizarea unei cantităŃi specifice<br />
(funcŃia obiectiv), supusă unor limite sau restricŃii sub aspectul răspunsului, folosind<br />
mijloace <strong>matematice</strong> raŃionale pentru evi<strong>de</strong>nŃierea proiectării îmbunătăŃite.<br />
O proiectare realizabilă este aceea care satisface toate restricŃiile. O proiectare<br />
realizabilă nu poate fi întot<strong>de</strong>auna şi optimală. O proiectare optimală se <strong>de</strong>fineşte<br />
printr-un punct în spaŃiul proiectării pentru care funcŃia obiectiv este minimizată sau<br />
maximizată şi proiectarea este realizabilă. Dacă în spaŃiul <strong>de</strong> proiectare există un<br />
minim relativ, mai pot exista şi alte proiectări optimale.<br />
6.2. NoŃiuni generale ale teoriei optimizării<br />
În cal<strong>cu</strong>lele <strong>de</strong> <strong>optimizare</strong> a structurilor se operează <strong>cu</strong> o serie <strong>de</strong> noŃiuni şi<br />
concepte ale teoriei <strong>matematice</strong> a optimizării, care capătă semnificaŃii specifice<br />
corespunzătoare scopului urmărit şi <strong>de</strong>zi<strong>de</strong>ratelor impuse.<br />
6.2.1. Variabile <strong>de</strong> proiectare<br />
Sunt cantităŃi numerice reale care trebuie <strong>de</strong>terminate în urma proiectării unei<br />
structuri. Astfel, pentru structura <strong>de</strong> bare din figura 6.3 consi<strong>de</strong>rând <strong>cu</strong>nos<strong>cu</strong>te<br />
încărcarea şi caracteristicile elastice ale materialului, rămân <strong>de</strong> <strong>de</strong>terminat prin cal<strong>cu</strong>l<br />
aria A a secŃiunii tijelor, lungimea l a acestora şi distanŃele d şi h.<br />
Setul <strong>de</strong> variabile A, l, h, d care <strong>de</strong>termină structura poartă numele <strong>de</strong><br />
parametrii <strong>de</strong> proiectare. Dacă barele sistemului din figură au secŃiunea inelară, în<br />
lo<strong>cu</strong>l ariei A, intervin ca variabile <strong>de</strong> proiectare diametrul mediu D şi grosimea δ a<br />
peretelui secŃiunii. În unele probleme în lo<strong>cu</strong>l secŃiunii A se dau momentele <strong>de</strong> inerŃie<br />
ale secŃiunii.<br />
Notând <strong>cu</strong> x vectorul variabilelor <strong>de</strong> proiectare, acesta are componentele, D, δ,<br />
d, h şi l. În cadrul variabilelor <strong>de</strong> proiectare pot să apară şi cantităŃi <strong>cu</strong>nos<strong>cu</strong>te<br />
(<strong>de</strong>terminate din condiŃii <strong>de</strong> funcŃionare a sistemului), care poartă numele <strong>de</strong> parametri.<br />
Astfel dacă – în cazul <strong>de</strong> faŃă – distanŃele d, h şi lungimea l a tijelor se<br />
consi<strong>de</strong>ră <strong>cu</strong>nos<strong>cu</strong>te, atunci vectorul variabilelor <strong>de</strong> proiectare va avea numai două<br />
componente (D şi δ).
În funcŃie <strong>de</strong> natura variabilelor <strong>de</strong> proiectare există două tipuri <strong>de</strong> aplicaŃii <strong>de</strong><br />
<strong>optimizare</strong>: <strong>optimizare</strong> dimensională şi <strong>optimizare</strong> configurativă. Optimizarea<br />
dimensională se referă la acea clasa <strong>de</strong> probleme la care modificarea variabilelor <strong>de</strong><br />
proiectare nu schimbă geometria problemei sau modul <strong>de</strong> discretizare. Optimizarea<br />
configuraŃiei se referă la acea clasă <strong>de</strong> probleme la care orice schimbare a variabilelor<br />
<strong>de</strong> proiectare produce modificări în geometria problemei sau a discretizării.<br />
În afara problemelor tipice <strong>de</strong> <strong>optimizare</strong> dimensională şi <strong>de</strong> formă mai există o<br />
clasa specială <strong>de</strong> probleme la care atât parametrii dimensionali cât şi cei <strong>de</strong> formă se<br />
<strong>de</strong>finesc ca variabile <strong>de</strong> proiectare.<br />
6.2.2. RestricŃii <strong>de</strong> proiectare<br />
Un set <strong>de</strong> valori atribuit variabilelor <strong>de</strong> proiectare reprezintă o soluŃie <strong>de</strong><br />
proiectare care <strong>de</strong>fineşte o structură. Dacă structura respectivă în<strong>de</strong>plineşte condiŃiile<br />
pentru care a fost proiectată, aceasta este o structură realizabilă. CondiŃiile care trebuie<br />
să le în<strong>de</strong>plinească o structură ca să fie realizabilă poartă numele <strong>de</strong> restricŃii <strong>de</strong><br />
proiectare. Numărul <strong>de</strong> restricŃii ale unei probleme nu este obligatoriu să fie egal <strong>cu</strong><br />
numărul variabilelor <strong>de</strong> proiectare. În majoritatea cazurilor, numărul restricŃiilor <strong>de</strong><br />
proiectare este mai mare <strong>de</strong>cât numărul variabilelor <strong>de</strong> proiectare. În proiectarea<br />
structurală se întâlnesc două tipuri <strong>de</strong> restricŃii: restricŃii <strong>de</strong> comportament şi restricŃii<br />
<strong>de</strong> mărginire.<br />
RestricŃiile <strong>de</strong> comportament sunt date <strong>de</strong> condiŃiile <strong>de</strong> rezistenŃă şi rigiditate<br />
impuse structurii, care permit acesteia să-şi în<strong>de</strong>plinească rolul pentru care a fost<br />
proiectată. Tensiunile echivalente cal<strong>cu</strong>late în varianta von Mises reprezintă un<br />
exemplu tipic <strong>de</strong> condiŃii <strong>de</strong> comportament în proiectarea structurală (σ ech ≤σ a ).<br />
RestricŃiile <strong>de</strong> mărginire provin din condiŃiile <strong>de</strong> limitare a unor variabile <strong>de</strong><br />
proiectare. RestricŃiile <strong>de</strong> proiectare se notează <strong>cu</strong> r k (k=1...K) şi se pot exprima<br />
explicit în funcŃie <strong>de</strong> variabilele <strong>de</strong> proiectare x.<br />
RestricŃiile <strong>de</strong> comportament <strong>de</strong>termină domeniul în care se face proiectarea.<br />
Ele pot fi formulate pentru o comportare a structurii în domeniul elastic şi în acest caz<br />
proiectarea se face în domeniul elastic. După <strong>cu</strong>m este <strong>cu</strong>nos<strong>cu</strong>t, în cazul solicitării în<br />
domeniul elastic, structurile posedă o importanŃă rezervă <strong>de</strong> capacitate portantă pe care<br />
proiectarea în acest domeniu nu o poate utiliza. Dacă restricŃiile <strong>de</strong> proiectare sunt<br />
formulate prin intermediul criteriilor <strong>de</strong> plasticitate, proiectarea optimală se face în<br />
domeniul plastic.<br />
6.2.3. FuncŃia obiectiv<br />
FuncŃia obiectiv este o funcŃie f(x) <strong>de</strong>finită ca o funcŃie <strong>de</strong> variabile <strong>de</strong><br />
proiectare, (ce figurează şi în restricŃiile <strong>de</strong> proiectare) care este extremizată în cadrul<br />
procesului <strong>de</strong> <strong>optimizare</strong>. Greutatea (sau volumul) unei structuri este un exemplu tipic<br />
<strong>de</strong> funcŃie obiectiv. Alegerea funcŃiei obiectiv reprezintă unul din cele mia importante<br />
aspecte ale procesului <strong>de</strong> <strong>optimizare</strong>. Construirea mo<strong>de</strong>lului matematic al unei<br />
probleme <strong>de</strong> <strong>optimizare</strong> impune o <strong>cu</strong>noaştere temeinică a procesului <strong>de</strong> <strong>de</strong>formare<br />
studiat. Scrierea incorectă a unei condiŃii, sau omiterea unor condiŃii importante,
conduce la obŃinerea unor rezultate inaplicabile în proiectare, <strong>de</strong>şi din punct <strong>de</strong> ve<strong>de</strong>re<br />
matematic acestea pot fi juste.<br />
Există situaŃii în care funcŃia obiectiv este constituită din două sau mai multe<br />
cantităŃi. În asemenea situaŃii se <strong>de</strong>fineşte o funcŃie obiectiv compusă. Astfel dacă f 1 (x)<br />
şi f 2 (x) sunt două funcŃii obiectiv ale unei probleme, se poate <strong>de</strong>fini o funcŃie obiectiv<br />
compusă <strong>de</strong> forma<br />
f ( x ) = a1 f1(<br />
x ) + a2<br />
f 2(<br />
x ) , (6.1)<br />
un<strong>de</strong> a 1 şi a 2 sunt constante <strong>de</strong> pon<strong>de</strong>re.<br />
RestricŃiile r k (k=1...K) şi funcŃia obiectiv f(x) reprezintă mo<strong>de</strong>lul problemei <strong>de</strong><br />
<strong>optimizare</strong> formulată. În cadrul unui proces <strong>de</strong> <strong>optimizare</strong>, funcŃia obiectiv este<br />
extremizată în ve<strong>de</strong>rea găsirii combinaŃiilor <strong>de</strong> variabile <strong>de</strong> proiectare pentru care<br />
aceasta capătă valori maxime sau minime.<br />
Dacă se consi<strong>de</strong>ră o funcŃie obiectiv<br />
f = f ( x1<br />
,x2<br />
)<br />
(6.2)<br />
<strong>de</strong>pen<strong>de</strong>ntă <strong>de</strong> două variabile, grafi<strong>cu</strong>l acesteia este dat <strong>de</strong> suprafaŃa Σ (fig. 6.4.).<br />
IntersecŃia acestei suprafeŃe <strong>cu</strong> plane paralele <strong>cu</strong> planul orizontal (x 1 0x 2 ) , dă naştere<br />
unor contururi închise, care proiectate în planul orizontal formează o familie <strong>de</strong> <strong>cu</strong>rbe<br />
cir<strong>cu</strong>mscrise Γ i . Curbele rezultate din secŃionarea suprafeŃei Γ <strong>cu</strong> plane mai apropiate<br />
<strong>de</strong> planul orizontal sunt situate în interiorul <strong>cu</strong>rbelor corespunzătoare unor înălŃimi <strong>de</strong><br />
secŃionare mai mari, dacă suprafaŃa Σ admite un punct <strong>de</strong> minim. Dacă suprafaŃa Σ ar<br />
admite un punct <strong>de</strong> maxim, dispunerea acestor <strong>cu</strong>rbe ar fi inversă.<br />
În figura 6.5 se prezintă grafi<strong>cu</strong>l funcŃiei obiectiv f(x), prin <strong>cu</strong>rbele <strong>de</strong> valoare<br />
f=ct. Este <strong>cu</strong>nos<strong>cu</strong>t că optimul (minimul în cazul <strong>de</strong> faŃă) pentru f(x), reprezintă<br />
condiŃia ca <strong>de</strong>rivatele parŃiale <strong>de</strong> ordinul întâi ale funcŃiei obiectiv (6.2) să fie nule.<br />
∂f<br />
( x)<br />
∂f<br />
( x)<br />
= 0 şi = 0 . (6.3)<br />
∂x1<br />
∂x2<br />
Rezolvând acest sistem se obŃin coordonatele punctului <strong>de</strong> minim. Anularea<br />
gradientului acestei funcŃii este <strong>de</strong> asemenea o condiŃie pentru <strong>de</strong>terminarea minimului,<br />
necesară, însă nu şi suficientă.<br />
În cazul <strong>de</strong> faŃa punctul <strong>de</strong> minim poate fi <strong>de</strong>terminat <strong>cu</strong> uşurinŃă pe cale<br />
analitică. În multe probleme practice extremele funcŃiilor nu se pot <strong>de</strong>termina analitic<br />
datorită complexităŃii formei acestora. Problemele se complică şi mai mult dacă<br />
variabilele <strong>de</strong> proiectare sau valori <strong>cu</strong>prinse între anumite intervale, sau dacă sunt<br />
impuse restricŃii <strong>de</strong> proiectare. În aceste situaŃii se re<strong>cu</strong>rge la meto<strong>de</strong>le numerice pentru<br />
<strong>de</strong>terminarea aproximativă a soluŃiei optime. Domeniul în care este trasat grafi<strong>cu</strong>l<br />
funcŃiei obiectiv este discretizat într-o reŃea <strong>de</strong> triunghiuri. Coordonatele vârfurilor<br />
triunghiurilor fiind <strong>cu</strong>nos<strong>cu</strong>te, se cal<strong>cu</strong>lează valorile funcŃiei obiectiv corespunzătoare<br />
fiecărui vârf, după care folosind un program specializat se <strong>de</strong>termină valoarea minimă<br />
a funcŃiei obiectiv.<br />
În numeroase aplicaŃii practice se pune problema optimizării unei funcŃii<br />
neliniare f(x) supusă unor restricŃii <strong>de</strong> forma<br />
g<br />
j<br />
( x)<br />
≤ 0; j = 1,..., ng<br />
,<br />
(6.4)<br />
h ( x)<br />
≤ 0; k = 1,..., n ,<br />
k<br />
k
care pot fi liniare sau neliniare, <strong>de</strong>pen<strong>de</strong>nte <strong>de</strong> variabilele <strong>de</strong> proiectare x 1 , x 2 ,...,x n , care<br />
constituie componentele vectorului variabilelor <strong>de</strong> proiectare<br />
x = { x1,<br />
x2<br />
,..., xn}<br />
. (6.5)<br />
Având în ve<strong>de</strong>re aspectele menŃionate mai sus, se re<strong>cu</strong>rge la <strong>optimizare</strong>a<br />
numerică. Majoritatea meto<strong>de</strong>lor <strong>de</strong> <strong>optimizare</strong> numerică necesită alegerea iniŃială a<br />
unui punct <strong>de</strong> start x 0 , ale cărui coordonate sunt reprezentate <strong>de</strong> un set <strong>de</strong> variabile <strong>de</strong><br />
proiectare. Pornind din acest punct, folosind o metodă oarecare se caută un nou punct<br />
x 1 , în care funcŃia f(x) are o valoare mai mică <strong>de</strong>cât în punctul x 0 ş.a.m.d.<br />
Una dintre cele mai comune relaŃii <strong>de</strong> re<strong>cu</strong>renŃă folosită <strong>de</strong> algoritmii iterativi<br />
este <strong>de</strong> forma<br />
q q−1<br />
q<br />
x = x + α*<br />
⋅S<br />
, (6.6)<br />
un<strong>de</strong> q este indicele iterativ, iar S este vectorul direcŃiei <strong>de</strong> căutare în spaŃiul <strong>de</strong>finit <strong>de</strong><br />
variabilele <strong>de</strong> proiectare. Mărimea scalară α*, <strong>de</strong>numită parametrul <strong>de</strong> salt <strong>de</strong>fineşte<br />
distanŃa <strong>de</strong> <strong>de</strong>plasare din punctul x q-1 în punctul x q , aflat pe direcŃia S (fig. 6.6).<br />
Algoritmii <strong>de</strong> <strong>optimizare</strong> neliniară bazaŃi pe relaŃia (6.5) pot fi separaŃi în două părŃi.<br />
Prima parte se referă la <strong>de</strong>terminarea direcŃiei <strong>de</strong> căutare S, în ve<strong>de</strong>rea optimizării<br />
funcŃiei obiectiv supusă restricŃiilor. A doua parte se referă la <strong>de</strong>terminarea<br />
parametrului <strong>de</strong> salt α*, care <strong>de</strong>fineşte mărimea <strong>de</strong>plasării în direcŃia S.<br />
6.2.4. Sensibilitatea<br />
Studiul sensibilităŃii reprezintă procedura care <strong>de</strong>termină schimbările care<br />
intervin în răspunsul unei cantităŃi ca urmare a modificării unei variabile <strong>de</strong> proiectare.<br />
Aceste răspunsuri sunt funcŃii <strong>de</strong> variabilele <strong>de</strong> proiectare. Toate cantităŃile rezultate<br />
din postprocesare car pot fi folosite ca funcŃii obiectiv şi restricŃii <strong>de</strong> proiectare, sunt <strong>de</strong><br />
asemenea indicate pentru <strong>de</strong>terminarea sensibilităŃii răspunsului.<br />
Există patru tipuri <strong>de</strong> studii <strong>de</strong> sensibilitate numite, sensibilitate globală,<br />
sensibilitate <strong>de</strong> compensare (offset), sensibilitate locală şi sensibilitate <strong>de</strong> <strong>optimizare</strong>.<br />
În cazul sensibilităŃii globale variabilele <strong>de</strong> proiectare sunt schimbate între<br />
limitele inferioare şi superioare într-un număr <strong>de</strong> paşi <strong>de</strong>terminaŃi. Numărul <strong>de</strong> paşi<br />
este acelaşi pentru toate variabilele <strong>de</strong> proiectare.<br />
În cazul sensibilităŃii <strong>de</strong> compensare sunt specificate valorile unor variabile <strong>de</strong><br />
proiectare. Variabilele <strong>de</strong> proiectare sunt <strong>de</strong>finite fie prin valorile actuale, fie printr-un<br />
raport <strong>de</strong> perturbare faŃă <strong>de</strong> valoarea iniŃială.<br />
Sensibilitatea locală se <strong>de</strong>fineşte printr-o perturbare a unei variabile <strong>de</strong><br />
proiectare în timp ce celelalte sunt menŃinute neschimbate. Variabilele <strong>de</strong> proiectare<br />
perturbate sunt <strong>de</strong>finite fie prin valorile actuale, fie prin raportul <strong>de</strong> perturbare faŃă <strong>de</strong><br />
valoarea iniŃială. Gradientul răspunsului cantităŃilor în raport <strong>cu</strong> variabilele <strong>de</strong><br />
proiectare se cal<strong>cu</strong>lează bazat pe metoda elementelor finite.<br />
În cazul sensibilităŃii <strong>de</strong> <strong>optimizare</strong> gradienŃii restricŃiilor <strong>de</strong> comportament şi<br />
funcŃiei obiectiv se cal<strong>cu</strong>lează în timpul procesului <strong>de</strong> <strong>optimizare</strong>. GradienŃii sunt<br />
obŃinuŃi luând <strong>de</strong>rivatele funcŃiilor <strong>de</strong> aproximare în raport <strong>cu</strong> variabilele <strong>de</strong> proiectare.<br />
Acest tip <strong>de</strong> sensibilitate se cal<strong>cu</strong>lează numai când urmează să se facă o <strong>optimizare</strong> a<br />
proiectării.
6.3. Formularea generală a unei probleme <strong>de</strong> <strong>optimizare</strong><br />
structurală<br />
Aşa <strong>cu</strong>m s-a arătat şi în paragraful anterior în formularea matematică a oricărei<br />
probleme <strong>de</strong> <strong>optimizare</strong> trebuie luate în consi<strong>de</strong>rare următoarele patru elemente:<br />
a) FuncŃia obiectiv: în cazul optimizării structurale aceasta trebuie să permită<br />
compararea a două soluŃii <strong>de</strong> proiectare la modificarea variabilelor <strong>de</strong> proiectare, fiind<br />
o măsură a performanŃelor mecanice şi/sau economice ale structurii. <strong>de</strong> exemplu, în<br />
formularea funcŃiei obiectiv se pot consi<strong>de</strong>ra mărimi pre<strong>cu</strong>m:<br />
- tensiuni şi <strong>de</strong>plasări maxime;<br />
- costul materialelor, costul producerii tehnologice sau costul operaŃional (în<br />
serviciu);<br />
- masa (volumul) structurii (ObservaŃie: costurile anterioare sunt în general<br />
proporŃionale <strong>cu</strong> masa structurii).<br />
b) Parametri (variabilele <strong>de</strong> proiectare) sunt în general legaŃi <strong>de</strong> geometria<br />
structurii (fig. 6.7) şi trebuie să fie variabile in<strong>de</strong>pen<strong>de</strong>nte.<br />
c) E<strong>cu</strong>aŃiile <strong>de</strong> stare: sunt e<strong>cu</strong>aŃiile ce guvernează problema analizată: <strong>de</strong><br />
exemplu condiŃiile <strong>de</strong> echilibru şi compatibilitate, legi constitutive <strong>de</strong> material.<br />
d) RestricŃiile: sunt dictate <strong>de</strong> răspunsul mecanic al structurii (restricŃii <strong>de</strong><br />
comportament), sau au caracter tehnologic (restricŃii <strong>de</strong> mărginire); <strong>de</strong> exemplu o<br />
anumită dimensiune poate varia într-un interval impus.<br />
RestricŃiile <strong>de</strong> comportament <strong>de</strong>termină domeniul în care se face proiectarea<br />
structurii: domeniul elastic sau plastic. Din punct <strong>de</strong> ve<strong>de</strong>re matematic, restricŃiile apar<br />
sub forma unor egalităŃi (şi atunci numărul <strong>de</strong> variabile in<strong>de</strong>pen<strong>de</strong>nte se reduce), sau<br />
inegalităŃi, care restrâng domeniul admisibil al variabilelor <strong>de</strong> proiectare, <strong>de</strong>finind<br />
spaŃiul soluŃiilor posibile, <strong>de</strong>numit spaŃiul <strong>de</strong> proiectare.<br />
FuncŃia obiectiv notată f(x) şi restricŃiile <strong>de</strong>finesc mo<strong>de</strong>lul problemei <strong>de</strong><br />
<strong>optimizare</strong> şi, după felul acestora problema este liniară sau neliniară. Problema <strong>de</strong><br />
<strong>optimizare</strong> numerică (programare matematică), se poate formula astfel:<br />
Să se <strong>de</strong>termine min f(x)=f(x 1 ,x 2 ,...,x n ) <strong>cu</strong> restricŃiile:<br />
g ( x ) ≤ 0 j = 1,...,n<br />
h ( x ) = 0<br />
k<br />
x ≤ x ≤ xi<br />
i<br />
j<br />
i<br />
k = 1,...,n<br />
g<br />
k<br />
i = 1,...,n<br />
(6.7)<br />
un<strong>de</strong> x i<br />
şi x i reprezintă valorile limită minimă şi respectiv maximă, pentru fiecare<br />
parametru <strong>de</strong> proiectare, <strong>cu</strong> posibile cazuri speciale:<br />
a ) re<strong>de</strong>finirea funcŃiei obiectiv:<br />
max[( f ( x )] = min[ − f ( x )]<br />
⎡ 1 ⎤<br />
(6.8)<br />
max[( f ( x )] = min⎢<br />
⎥<br />
⎣ f ( x ) ⎦<br />
b) reformularea egalităŃilor:
⎧g1(<br />
x ) = h( x ) ≤ 0<br />
h ( x ) = 0 ⇔ ⎨<br />
, (6.9)<br />
⎩g<br />
2(<br />
x ) = −h(<br />
x ) ≤ 0<br />
c) introducerea <strong>de</strong> noi variabile pentru a lucra <strong>cu</strong> valori reale pozitive în două<br />
situaŃii uzuale:<br />
c1) dacă − a ≤ x b , <strong>cu</strong> a,b>0<br />
se introduce<br />
i ≤<br />
'<br />
'<br />
x = x a <strong>cu</strong> x ≥ 0<br />
(6.10)<br />
i i +<br />
c2) sau se introduc variabilele<br />
i<br />
+<br />
i<br />
x ,<br />
−<br />
i<br />
x , pozitive, astfel ca<br />
x + i − x<br />
−<br />
i = xi<br />
(6.11)<br />
În cazul unui număr <strong>de</strong> variabile <strong>de</strong> proiectare n=2 sau n=3, spaŃiul <strong>de</strong><br />
proiectare se poate reprezenta grafic într-un plan, respectiv în spaŃiul tridimensional.<br />
soluŃia optimă (vectorul x*), poate fi i<strong>de</strong>ntificată şi caracterizată, ca acel punct al<br />
spaŃiului <strong>de</strong> proiectare, <strong>de</strong> la care orice <strong>de</strong>plasare conduce sau la o creştere a valorii<br />
funcŃiei obiectiv, sau la încălcarea (cel puŃin), a unei restricŃii (cazul punctelor x*<br />
reprezentate în fig. 6.8 a,b pentru funcŃia obiectiv f(x 1 ,x 2 ) <strong>de</strong> două variabile). În primul<br />
caz punctul <strong>de</strong> minim corespun<strong>de</strong> punctului <strong>de</strong> tangenŃă dintre <strong>cu</strong>rba f(x)=ct şi <strong>cu</strong>rba <strong>de</strong><br />
restricŃie g(x)=ct (fig. 6.8 a), iar în cel <strong>de</strong>-al doilea caz (vertex), soluŃia optimă se<br />
găseşte la intersecŃia celor două <strong>cu</strong>rbe corespunzătoare a două restricŃii g 1 (x)=C 1 şi<br />
g 2 (x)=C 2 (fig. 6.8 b).<br />
Problema <strong>de</strong> <strong>optimizare</strong> numerică constă în final, în găsirea punctului <strong>de</strong> optim<br />
x*, folosind metoda cea mai a<strong>de</strong>cvată care să conducă la acesta, plecând <strong>de</strong> la o soluŃie<br />
iniŃială x 0 . Procesul <strong>de</strong> <strong>optimizare</strong> se materializează în acest caz prin par<strong>cu</strong>rgerea în<br />
spaŃiul <strong>de</strong> proiectare a unui anumit drum între punctul <strong>de</strong> pornire x 0 şi cel <strong>de</strong> optim x*<br />
(fig. 6.9).<br />
Exemplul 6.1<br />
Să se studieze structura <strong>de</strong> bare arti<strong>cu</strong>late din fig. 6.10 în cazul minimizării<br />
greutăŃii structurii ce are o comportare liniar elastică. Variabilele <strong>de</strong> proiectare sunt<br />
ariile secŃiunilor transversale ale barelor. Pentru cazul A 1 =A 3 , σ at =500 MPa, σ ac =250<br />
MPa, P 1 =P 2 =P=10 kN, ρ=2800 kg/m 3 , (α=45 o ), H=0,5 m, să se traseze spaŃiul <strong>de</strong><br />
proiectare şi să se precizeze într-o diagramă, punctul <strong>de</strong> optim.<br />
În cazul cel mai general al barelor <strong>de</strong> secŃiune diferită sub acŃiunea lui P 1 sau<br />
lui P 2 se observă că restricŃiile problemei sunt:<br />
σ 1 ,σ 2 ,σ 3 ≤σ at date <strong>de</strong> P 1<br />
-σ 1 ,-σ 2 ,-σ 3 ≤σ ac date <strong>de</strong> P 1<br />
σ 1 ,σ 2 ,σ 3 ≤σ at date <strong>de</strong> P 2<br />
-σ 1 ,-σ 2 ,-σ 3 ≤σ ac date <strong>de</strong> P 2<br />
Dacă A 1 =A 3 , P 1 =P 2 =P (structură simetrică), din 2 variabile <strong>de</strong> proiectare rămân<br />
2 şi din 12 restricŃii rămân 8:<br />
(1) σ 1 ≤σ at date <strong>de</strong> P 1 ; σ 1 ≤σ at date <strong>de</strong> P 2 (5)<br />
(2) -σ 2 ≤σ at date <strong>de</strong> P 1 ; σ 2 ≤σ at date <strong>de</strong> P 2 (6)<br />
(3) -σ 1 ≤σ ac date <strong>de</strong> P 1 ; -σ 1 ≤σ ac date <strong>de</strong> P 2 (7)<br />
(4) -σ 2 ≤σ ac date <strong>de</strong> P 1 ; -σ 2 ≤σ ac date <strong>de</strong> P 2 (8)
un<strong>de</strong> observăm că sub acŃiunea lui P 1 , bara (1) nu poate fi solicitată la compresiune<br />
rezultă că restricŃiile (3) nu pot fi posibile, iar restricŃia (2) este i<strong>de</strong>ntică <strong>cu</strong> restricŃia<br />
(6). łinând seama şi <strong>de</strong> simetrie, din cele 8 restricŃii rămân 3 şi problema minimizării<br />
greutăŃii poate fi reformulată astfel:<br />
Să se minimizeze: ( A , A ) = ρH(<br />
2 A + A ) <strong>cu</strong> restricŃiile:<br />
σ<br />
σ<br />
1<br />
2<br />
⎛<br />
= P⎜<br />
⎝<br />
⎛<br />
= P⎜<br />
⎝<br />
G<br />
1 2<br />
2<br />
1 2<br />
2A<br />
A ⎞<br />
1<br />
+<br />
2 ⎟ ≤ σ<br />
2<br />
2A<br />
+ A A<br />
1 2 1 2 ⎠<br />
2 A ⎞<br />
1 ⎟ ≤ σ<br />
2<br />
2A<br />
+ A A<br />
1 2 1 2 ⎠<br />
at<br />
at<br />
, (1’)<br />
, (2’)<br />
⎛ A ⎞<br />
P⎜<br />
2<br />
− σ<br />
⎟<br />
3 =<br />
≤ σ<br />
ac<br />
, (4’)<br />
2<br />
A A A<br />
⎝ 2 1 + 2 1 2 ⎠<br />
un<strong>de</strong> se observă că structura este optimizată în domeniul liniar elastic, restricŃia (2’)<br />
fiind liniară (se reduce A 1 ).<br />
FuncŃia obiectiv este liniară, dar problema este o problemă neliniară (datorită<br />
restricŃiilor 1’ şi 4’).<br />
În cazul datelor precizate spaŃiul <strong>de</strong> purectare este reprezentat în fig. 6.11. În<br />
această figura sunt reprezentate cele trei restricŃii pre<strong>cu</strong>m şi liniile (<strong>cu</strong>rbele) pentru care<br />
greutatea adimensională a structurii este constantă, punându-se în evi<strong>de</strong>nŃă domeniul<br />
admisibil în planul celor două arii adimensionale.<br />
Studiind regiunea soluŃiilor posibile si punctul <strong>de</strong> optim O, rezultă:<br />
a) punctul <strong>de</strong> optim O, nu corespun<strong>de</strong> unei soluŃii care reprezintă o structură<br />
static <strong>de</strong>terminată (punctul A pe figură în care A 2 =0);<br />
b) punctul <strong>de</strong> optim se găseşte pe restricŃia (1) dar nu şi pe restricŃia (2) şi<br />
<strong>de</strong>ci în punctul <strong>de</strong> optim O, nu toate barele sistemului sunt la limita <strong>de</strong><br />
tensiune admisibilă sub unul din cazurile <strong>de</strong> încărcare;<br />
c) punctul B corespun<strong>de</strong> intersecŃiei a două restricŃii (1’ şi 4’) pentru care se<br />
ating simultan valorile tensiunilor σ at şi -σ ac .<br />
Se observă că fiecare set <strong>de</strong> încărcări conduce la un nou set <strong>de</strong> restricŃii, ceea<br />
ce face ca problemele practice să se complice foarte mult. Optimul nu este neapărat o<br />
structură static <strong>de</strong>terminată, sau <strong>cu</strong> toate elementele la limita <strong>de</strong> tensiune.<br />
Exemplul 6.2<br />
Să se studieze structura din fig. 6.12, <strong>de</strong>terminându-se sarcina maximă posibilă<br />
pe care o poate prelua în condiŃiile extin<strong>de</strong>rii comportării materialelor în domeniul<br />
A2<br />
plastic (pentru simplificare se admite A<br />
1<br />
= ).<br />
2<br />
Tensiunile din bare în acest caz sunt:<br />
⎛<br />
⎞<br />
⎜<br />
1<br />
σ<br />
⎟<br />
1 = P ,<br />
⎝ 2A1<br />
+ 2A2<br />
⎠
⎛ ⎞<br />
⎜<br />
1<br />
σ<br />
⎟<br />
2 = P .<br />
⎝ A1<br />
+ 2A2<br />
⎠<br />
A2<br />
Pentru A<br />
1<br />
= rezultă<br />
2<br />
σ 2 P 1<br />
σ<br />
1<br />
= = .<br />
2 A1<br />
3 2<br />
Dacă se admite că materialul barelor se comportă după schematizarea lui<br />
Prandtl, <strong>cu</strong> E p =0, (fig. 6.13), se poate trasa diagrama <strong>de</strong> variaŃie a tensiunilor din bare<br />
în funcŃie <strong>de</strong> sarcina aplicată P (fig. 6.14).<br />
După <strong>cu</strong>m rezultă din figura 6.14 când tensiunile din bara doi ating limita <strong>de</strong><br />
1<br />
<strong>cu</strong>rgere, în bara unu tensiunea σ 1 este σ<br />
2 . Prin urmare în acest caz nu se poate<br />
2<br />
realiza o <strong>optimizare</strong> <strong>cu</strong> toate elementele structurii solicitate la limita <strong>de</strong> <strong>cu</strong>rgere. Dacă<br />
sarcina P creşte în continuare, până când şi tensiunea din bara unu <strong>de</strong>vine σ 1 =σ c , se<br />
obŃine sarcina <strong>de</strong> cedare P lim . În momentul în care materialul din bara doi atinge limita<br />
<strong>de</strong> <strong>cu</strong>rgere (σ 2 =σ c ), sarcina P este<br />
⎛ σc<br />
⎞⎛<br />
A2<br />
⎞<br />
3<br />
Pelastic<br />
= N1<br />
2 + N 2 = ⎜ ⎟ 2 + σ c A2<br />
= σc<br />
A2<br />
2<br />
⎜<br />
⎟<br />
,<br />
⎝ ⎠⎝<br />
2 ⎠<br />
2<br />
A2<br />
iar Plim<br />
= σ<br />
c<br />
A2 + σ<br />
c<br />
A1<br />
2 = σc<br />
A2<br />
+ σ<br />
c<br />
2 = 2σ<br />
c<br />
A2<br />
.<br />
2<br />
Ca urmare P limită >P elastic obŃinându-se o creştere importantă a sarcinii capabile.<br />
Volumul total al structurii corespunzător celor două situaŃii este:<br />
a) pentru P=P elastic :<br />
= A H + 2 A H 2 = A H + 2A<br />
H = A H .<br />
V 2 1<br />
2 2 3 2<br />
Cum<br />
2 P<br />
A2 = rezultă<br />
3 σ<br />
3 P 2PH<br />
V = 3 ⋅ H = .<br />
2 σc<br />
σc<br />
b) pentru P=P limită<br />
P<br />
A = 2<br />
2 rezultă<br />
σ<br />
c<br />
c<br />
3 PH<br />
V = 3A<br />
2 H = .<br />
2 σc<br />
Deplasarea pe verticală a punctului O din figura 6.12 cal<strong>cu</strong>lată <strong>cu</strong> metoda<br />
Mohr-Maxwell este<br />
3 PH<br />
τ<br />
el<br />
=<br />
2 EA<br />
2
3<br />
Pentru P=P elastic = σ c A2<br />
rezultă<br />
2<br />
2 PH σc<br />
H<br />
τel<br />
= =<br />
3 EA2<br />
E<br />
Pentru a doua stare limită, <strong>de</strong>plasarea nu mai poate fi cal<strong>cu</strong>lată <strong>cu</strong> metoda<br />
Mohr-Maxwell. Întrucât bara centrală s-a <strong>de</strong>format plastic. Conform notaŃiilor din fig.<br />
6.15<br />
o<br />
δ = δ cos α = cos 45<br />
δ<br />
1 δ<br />
1<br />
N l<br />
=<br />
EA<br />
1 1<br />
1<br />
N1H<br />
2 2N1H<br />
= =<br />
A2<br />
EA2<br />
E<br />
2<br />
2( P − N )H ( P − N<br />
( P − N<br />
2<br />
2<br />
=<br />
EA<br />
)H<br />
2<br />
2<br />
δ =<br />
= 2<br />
.<br />
2<br />
2<br />
)<br />
=<br />
2(<br />
P − N<br />
EA<br />
2<br />
EA2<br />
EA2<br />
2<br />
un<strong>de</strong> N 2 =σ c A 2 .<br />
Când P=P limită =2σ c A 2<br />
σ c H<br />
δ = 2 = 2δel<br />
E<br />
iar <strong>cu</strong>rba sarcină-<strong>de</strong>plasare are forma din figura 6.16.<br />
În acest caz special se observă că pentru P=P lim <strong>cu</strong>rgerea apare în toate cele 3<br />
bare. În general doar 2 bare ce<strong>de</strong>ază înainte ca întreaga structură să ce<strong>de</strong>ze, sau (n 1 ) din<br />
(n) bare ce<strong>de</strong>ază înainte <strong>de</strong> cedarea întregii structuri.<br />
Cazul corespun<strong>de</strong> situaŃiei în care proiectantul nu este interesat <strong>de</strong> sarcina<br />
pentru care unul din elementele structurii atinge o stare limită, ci <strong>de</strong> sarcina maximă<br />
posibilă pe care o poate prelua structura fără a-şi pier<strong>de</strong> funcŃionalitatea <strong>de</strong>numită<br />
sarcina limită.<br />
Estimarea sarcinii limită în acest exemplu este acoperitoare datorită faptului că<br />
în cal<strong>cu</strong>l s-a consi<strong>de</strong>rat schematizarea <strong>cu</strong>rbei caracteristice <strong>cu</strong> modul <strong>de</strong> plasticitate nul.<br />
Problema poate fi generalizată pentru cazul sarcinilor multiple, (fig. 6.10)<br />
folosind conceptul sarcinii limită.<br />
În acest caz problema se formulează astfel:<br />
Să se găsească min V. = 2HA1 + HA2<br />
+ 2HA3<br />
, <strong>cu</strong> restricŃiile:<br />
⎛ A2<br />
⎞<br />
σ<br />
c ⎜ A1<br />
+<br />
⎟ P<br />
1<br />
,<br />
2 ≥<br />
⎝ ⎠<br />
σ A + A P<br />
( ) ,<br />
c 1 3<br />
≥<br />
1<br />
⎛ A2<br />
⎞<br />
σ<br />
c ⎜ A3<br />
+<br />
⎟ P2<br />
,<br />
2 ≥<br />
⎝ ⎠<br />
σ A + A P<br />
( ) ,<br />
c 1 3<br />
≥<br />
2<br />
2<br />
2<br />
)H
problema fiind liniară atât ca funcŃie obiectiv cât şi ca restricŃii. Consi<strong>de</strong>rând P 1 =P 2 =P<br />
şi A 1 =A 3 restricŃiile <strong>de</strong>vin<br />
⎧ ⎛ A2<br />
⎞<br />
⎪σc<br />
⎜ A1<br />
+ ⎟ ≥ P<br />
⎨ ⎝ 2 ⎠<br />
⎪<br />
⎩σc<br />
( A1<br />
+ A1<br />
) ≥ P<br />
⎧ x2<br />
⎪x1<br />
+ ≥1<br />
sau ⎨ 2<br />
⎪<br />
⎩2x1<br />
≥1<br />
A1<br />
A2<br />
<strong>cu</strong> x1 = şi x2 = .<br />
P / σ P / σ<br />
c<br />
c<br />
V<br />
Se notează <strong>cu</strong> V ~ = = 2 2x1<br />
+ x2<br />
, un volum adimensional<br />
HP<br />
σ<br />
c<br />
SpaŃiul <strong>de</strong> proiectare, în acest caz este reprezentat în fig. 6.17 un<strong>de</strong> s-au figurat<br />
cele două restricŃii şi modul <strong>de</strong> variaŃie a lui V ~ .<br />
x2<br />
În cazul A 2 = 2A1<br />
<strong>de</strong>ci x<br />
1<br />
= optimul este în punctul O şi V ~<br />
2<br />
3<br />
corespunzător este V ~ = <strong>de</strong>ci<br />
2<br />
3 PH PH<br />
Vopt<br />
= = 2,<br />
121 .<br />
2 σc<br />
σ<br />
c<br />
În cazul admiterii comportării structurii în domeniul elastic, corespunzător<br />
PH<br />
punctului O din figura 6.11 se obŃine Vopt<br />
= 2,<br />
639 în timp ce structura static<br />
σ<br />
PH<br />
<strong>de</strong>terminată reprezentată prin punctul A <strong>de</strong> pe aceeaşi figură conduce la V = 2 , 828 .<br />
σc<br />
Se observă <strong>de</strong>ci o ameliorare substanŃială a volumului optim în cazul folosirii<br />
conceptului <strong>de</strong> sarcină limită.<br />
În plus optimul este situat într-un vertex şi problema este <strong>de</strong> tipul <strong>cu</strong>nos<strong>cu</strong>t sub<br />
numele <strong>de</strong> programare liniară.<br />
6.4. Minimizarea funcŃiilor <strong>de</strong> o variabilă<br />
c<br />
Se consi<strong>de</strong>ră funcŃia obiectiv f(x) pentru care ne propunem să găsim<br />
f ( x )<br />
min<br />
x∈R<br />
Pentru aceasta exista două posibilităŃi:<br />
- directă, <strong>de</strong> localizare a minimului lui f(x),<br />
(6.12)
- indirectă, prin localizarea şi rafinarea rădăcinilor lui f’(x), un<strong>de</strong> prin<br />
localizare se înŃelege restrângerea intervalului în care se află minimul (sau<br />
rădăcina căutată), iar rafinarea este etapa în care se obŃine rapid o precizie<br />
ridicată a aproximaŃiei respective.<br />
Localizarea directă a minimului se face printr-un algoritm <strong>de</strong>zvoltat prin<br />
analogie <strong>cu</strong> metoda bisecŃiei <strong>de</strong> rezolvare a unei e<strong>cu</strong>aŃii. Astfel dacă rădăcina unei<br />
e<strong>cu</strong>aŃii f(x)=0 se află în intervalul [a, b] pe care f(x) are valori opuse ca semn la capete,<br />
restrângerea intervalului se face prin alegerea unei valori x, la mijlo<strong>cu</strong>l intervalului şi<br />
menŃinerea în procesul iterativ a intervalului [a, x] sau [x, b] pentru care f(x) are în<br />
continuare valori <strong>de</strong> semn schimbat la capete. Prin analogie pentru localizarea unui<br />
minim este nevoie <strong>de</strong> 3 puncte a
x3 = x2<br />
− ρ(<br />
x2<br />
− x1<br />
); ρ∈[<br />
0,<br />
1]<br />
, (6.16)<br />
un<strong>de</strong> dacă f’(x 3 )>0, atunci x*∈[x 1 , x 3 ] (cazul din figura 6.20), respectiv f’(x 3 )
6.6.1. <strong>Metoda</strong> direcŃiilor alternative<br />
<strong>Metoda</strong> este prezentată aici pentru clarificarea caracteristicilor generale<br />
specifice meto<strong>de</strong>lor <strong>de</strong> ordinul zero. Plecând <strong>de</strong> la o valoare <strong>de</strong> start x, se încearcă<br />
minimizarea funcŃiei obiectiv prin varierea fiecărei coordonate x i , pe rând:<br />
repetă:<br />
pentru i=1, n<br />
găseşte α astfel încât f(x+αe i ) este minimizată<br />
x→x+e i<br />
sfârşit<br />
până când se obŃine convergenŃ)ă.<br />
ObservaŃie: o iteraŃie reprezintă un ciclu <strong>de</strong> variere a fiecărei componente x i , iar<br />
e i este vectorul unitate după direcŃia i, în R n .<br />
O <strong>de</strong>zvoltare a acestei meto<strong>de</strong> folosind o căutare multidirecŃională a fost<br />
realizată <strong>de</strong> Dennis şi Tuczon.<br />
n<br />
<strong>Metoda</strong> construieşte un simplex <strong>de</strong>finit <strong>de</strong> n+1 vectori { v i } 0 în Rn (pentru<br />
cazul a n variabile <strong>de</strong> proiectare) şi este ilustrată în fig. 6.22 pentru n=2.<br />
Vârfurile sunt {v 0 , v 1 , v 2 } şi se consi<strong>de</strong>ră f ( v ) = min f ( v )<br />
0 i .<br />
i<br />
Scopul meto<strong>de</strong>i este <strong>de</strong> a produce un simplex <strong>cu</strong> valori inferioare ale funcŃiei<br />
obiectiv. În primul pas vârfurile v 1 şi v 2 sunt reflectate pe direcŃiile ce unesc v 0 şi v 1 ,<br />
respectiv v 0 şi v 2 , obŃinându-se r 1 şi r 2 şi <strong>de</strong>ci un nou simplex {v 0 , r 1 , r 2 }. Dacă<br />
f(r i )
( n + 1 + n −1)<br />
Q<br />
p =<br />
n 2<br />
(6.25)<br />
Q<br />
q = ( n + 1 −1)<br />
n 2<br />
un<strong>de</strong> e k este vectorul unitate după direcŃia k. Se evaluează apoi funcŃia f(x) în aceste<br />
vârfuri şi se notează <strong>cu</strong> x h , x e , x s , valorile maximă, minimă şi cea <strong>de</strong> a doua după<br />
valoarea maximă.<br />
Valoarea x h este înlo<strong>cu</strong>ită <strong>cu</strong> un vârf în care f(x) are o valoare mai mică,<br />
folosind trei operatori: reflexie, contracŃie şi expansiune.<br />
Reflexia creează un nou punct x r în lungul liniei ce uneşte x h şi centrul x ,<br />
<strong>de</strong>terminat <strong>de</strong> cele n-1 vârfuri rămase<br />
n<br />
1<br />
x = ∑ xi<br />
, i ≠ h . (6.26)<br />
n<br />
i=<br />
1<br />
Vârful e <strong>de</strong>terminat <strong>cu</strong><br />
xr<br />
= x + α(<br />
x − xh<br />
) , (6.27)<br />
un<strong>de</strong> α este un coeficient <strong>de</strong> reflexie (în mod normal α=1).<br />
Dacă f r =f(x r ), satisface condiŃia f e
1 ⎛ 1 2 2 ⎞<br />
f ( x1<br />
,x2<br />
) = mγ⎜<br />
− α1x1<br />
+ x1<br />
+ x ⎟<br />
2 ⎝ 2 ⎠<br />
A1<br />
l1<br />
h P<br />
un<strong>de</strong> m = ; γ = ; α = ; p = .<br />
A l l EA<br />
2<br />
2<br />
1<br />
2<br />
2<br />
1 ⎛<br />
+ ⎜<br />
1x1<br />
2<br />
− α +<br />
⎝<br />
1<br />
2<br />
x<br />
2<br />
1<br />
2<br />
x<br />
−<br />
γ<br />
Consi<strong>de</strong>rând m=5; γ=4; α 1 =0,02; p =2⋅10 -5 şi <strong>cu</strong> x 0 ={2, 2}, se cere să se<br />
<strong>de</strong>termine min f(x) folosind algoritmul simplex secvenŃial.<br />
Rezolvare<br />
Este prezentată pe larg prima iteraŃie. Se consi<strong>de</strong>ră un simplex <strong>de</strong> mărime 1 şi<br />
se obŃine iniŃial S φ ={{2;2}, {2,96593; 2,25882}, {2,25882; 2,96593}} <strong>cu</strong> valorile<br />
funcŃiei obiectiv {343, 696; 918, 432; 525, 267}.<br />
Se observă că performanŃele vârfului al doilea sunt cele mai slabe (funcŃia<br />
obiectiv are o valoare maximă) <strong>de</strong>ci acest vârf trebuie modificat.<br />
Centrul segmentului ce uneşte primul şi al treilea vârf este dat <strong>de</strong> {2,12941;<br />
2,48296}. FaŃă <strong>de</strong> acesta se realizează o reflexie <strong>cu</strong> α=1, obŃinându-se vârful <strong>de</strong><br />
coordonate {1,29289; 2,7074} <strong>cu</strong> valoarea funcŃiei obiectiv (140, 739}. Deoarece în<br />
această direcŃie funcŃia obiectiv <strong>de</strong>serveşte, chiar sub valoarea celui <strong>de</strong>-al treilea vârf<br />
iniŃial se realizează o expansiune <strong>de</strong> coeficient β=2, obŃinând vârful {0,456377;<br />
2,93125} <strong>cu</strong> valoarea funcŃiei {9,94421} şi după prima iteraŃie. Simplexul <strong>de</strong>vine<br />
{{2,2}; {2,25882; 2,965934}; {0,456377; 2,93125}}.<br />
După 50 <strong>de</strong> iteraŃii valoarea minimă a funcŃiei este –25,632 pentru x 1 =0,02,<br />
x 2 =1,6002.<br />
IteraŃiile respective prezentate în fig. 6.24.<br />
6.6.3. <strong>Metoda</strong> Complex<br />
<strong>Metoda</strong> Complex propusă <strong>de</strong> Box în 1965, [14] este o metodă foarte utilizată<br />
în cazul unor probleme <strong>de</strong> dimensiuni medii, având eventual şi variabile discrete.<br />
<strong>Metoda</strong> are două faze, generând o mulŃime iniŃială <strong>de</strong> soluŃii care este<br />
îmbunătăŃită progresiv, prin eliminarea celor mai slabe soluŃii (pentru care funcŃia<br />
obiectiv are valori mari).<br />
Fazele caracteristice sunt:<br />
a) iniŃierea prin care se generează un set <strong>de</strong> soluŃii iniŃiale P astfel: o soluŃie ce<br />
satisface restricŃiile este admisă direct, o soluŃie care nu respectă restricŃiile este adusă<br />
către centrul zonei formate <strong>de</strong> soluŃiile posibile la jumătatea distanŃei <strong>de</strong> soluŃii posibile<br />
la jumătatea distanŃei dintre punctul respectiv şi centrul zonei. Procesul poate fi repetat<br />
dacă soluŃia continuă să încalce restricŃiile.<br />
b) <strong>optimizare</strong>a propriu-zisă. În această fază, mulŃimea P (complex) se<br />
<strong>de</strong>plasează către optim prin mutarea punctului (caracterizat <strong>de</strong> cea mai <strong>de</strong>favorabilă<br />
valoare a funcŃiei obiectiv), către o valoare mai bună (mai mică).<br />
Dacă P’ este mulŃimea restului punctelor şi X c este centrul zonei <strong>de</strong>finită <strong>de</strong> P’,<br />
noile coordonate ale lui X w sunt date <strong>de</strong>:<br />
'<br />
X = X + r( X − X )<br />
(6.31)<br />
wi<br />
ci<br />
ci<br />
wi<br />
⎞<br />
⎟<br />
γ<br />
⎠<br />
4<br />
− γ<br />
px<br />
1
<strong>de</strong>ci X w este reflectat <strong>cu</strong> factorul <strong>de</strong> reflectare r.<br />
'<br />
Dacă X w<br />
nu satisface restricŃiile sau are o valoare a funcŃiei obiectiv mai<br />
mare, (în cazul minimizării unei funcŃii), <strong>de</strong>cât cea mai mare valoare din setul P’,<br />
atunci X este adusă la jumătatea distanŃei dintre centrul X c şi X :<br />
'<br />
w<br />
'<br />
' ( X wi + X ci )<br />
X wi = (6.32)<br />
2<br />
Procesul se repetă dacă în continuare soluŃia nu reprezintă o ameliorare a<br />
valorii funcŃiei obiectiv.<br />
Stocarea algoritmului se realizează atunci când valorile funcŃiei obiectiv nu<br />
diferă (<strong>cu</strong> o toleranŃă admisă) pentru ultimele 5 puncte analizate.<br />
Box a arătat că valorile optimale pentru algoritm sunt:<br />
r=1,3 (6.33)<br />
iar numărul <strong>de</strong> puncte din setul P este n P =2n, un<strong>de</strong> n P este numărul <strong>de</strong> variabile <strong>de</strong><br />
proiectare.<br />
Van Bla<strong>de</strong>l [15] optimizează metoda în cazul variabilelor discrete impunând:<br />
r=2 iar n P =2n+2 (6.34)<br />
Exemplul 6.4<br />
Pentru structura <strong>de</strong> bare arti<strong>cu</strong>late din fig. 6.25 se cere minimizarea volumului<br />
structurii <strong>cu</strong> restricŃia ca <strong>de</strong>plasarea punctului <strong>de</strong> aplicare a forŃei P să nu <strong>de</strong>păşească o<br />
<strong>de</strong>plasare impusă (ambele bare fiind din acelaşi material <strong>de</strong> modul <strong>de</strong> elasticitate<br />
longitudinală E).<br />
Volumul structurii este dat <strong>de</strong>:<br />
v = 10 ⋅ L ⋅ A1<br />
+ L ⋅ A2<br />
,<br />
iar <strong>de</strong>plasarea punctului <strong>de</strong> aplicate a forŃei P este<br />
PL ⎛<br />
⎞<br />
⎜<br />
10 10 1<br />
δ =<br />
+ ⎟ .<br />
E<br />
⎝ 9A1 9A2<br />
⎠<br />
2<br />
A1<br />
A2<br />
v EL δ<br />
Notând a1 = , a2<br />
= , V = , ∆ = , se realizează<br />
2<br />
2<br />
3<br />
L L L P L<br />
adimensionalizarea, problema <strong>de</strong>venind<br />
min V = 10a1<br />
+ a2<br />
<strong>cu</strong> restricŃia<br />
10 10 1<br />
∆ = + ≤ ∆<br />
9a<br />
a<br />
1<br />
9<br />
2<br />
a<br />
un<strong>de</strong> ∆ a =0,176.<br />
Dacă a 1 , a 2 sunt valori reale optimul este dat <strong>de</strong> a 1 =22,086; a 2 =6,984;<br />
V=76,826.<br />
În continuare se prezintă rezultatele obŃinute, consi<strong>de</strong>rând variabile întregi şi<br />
pozitive:<br />
20≤a 1 ≤50<br />
1≤a 2 ≤31.<br />
'<br />
w
Se creează un punct iniŃial <strong>de</strong> coordonate {30;3} şi apoi 6 puncte aleatoare<br />
prezentate în tabelul 6.1.<br />
Punctul X 2 care are valoarea maximă pentru funcŃia obiectiv este reflectat faŃă<br />
<strong>de</strong> centrul setului P’ (fig. 6.26).<br />
Folosind relaŃia (6.31) <strong>cu</strong> r=2,<br />
'<br />
a 1<br />
=34+2×(34-49)=4<br />
'<br />
a 2<br />
=138+2×(13,8-3)=36.<br />
'<br />
X 2<br />
este dat <strong>de</strong><br />
' '<br />
a1 , a2<br />
:<br />
Punct a 1 a 2 V<br />
x 1<br />
x 2<br />
x 3<br />
x 4<br />
x 5<br />
x 6<br />
30<br />
49<br />
34<br />
31<br />
40<br />
35<br />
3<br />
4<br />
28<br />
29<br />
2<br />
7<br />
97,9<br />
159<br />
135,5<br />
127<br />
128,5<br />
117,7<br />
Tabelul 6.1<br />
Punct a 1 a 2 V<br />
x 1<br />
x 3<br />
x 4<br />
x 5<br />
x 6<br />
30<br />
34<br />
31<br />
40<br />
35<br />
3<br />
28<br />
29<br />
2<br />
7<br />
97,9<br />
135,5<br />
127<br />
128,5<br />
117,7<br />
Centru 34 13,8<br />
Tabelul 6.2<br />
'<br />
a '<br />
2<br />
Deoarece a 1 ∉[20,50] şi nici ∉[1,31] se adoptă:<br />
'<br />
a 1<br />
=20<br />
'<br />
a 2<br />
=31<br />
şi noile valori ale funcŃiei obiectiv şi respectiv <strong>de</strong>plasării (normalizate) sunt:<br />
V =<br />
10 × 20 + 31 = 94,<br />
2<br />
10 10 1<br />
∆ = + = 0179 , > 0175 ,<br />
9 × 20 9 × 31<br />
'<br />
Deoarece restricŃia nu se respectă, X 2<br />
este mutat către centru, la jumătatea<br />
distanŃei, conform relaŃiei (6.32):<br />
" 20 + 3<br />
a1<br />
= = 27<br />
2<br />
" ( 31 + 13,<br />
8)<br />
a2<br />
= = 22<br />
2<br />
Cu aceste valori, volumul si <strong>de</strong>plasarea <strong>de</strong>vin:
V = 10 × 27 + 22 = 107,<br />
4<br />
10 10 1<br />
∆ = + = 0,<br />
1359 < 0175 ,<br />
9 × 27 9 × 22<br />
Punctul (27,22) este <strong>de</strong>ci acceptat şi noul set P este cel din tabelul 6.3.<br />
Punct A 1 A 2 V<br />
x 1<br />
x 2<br />
x 3<br />
x 4<br />
x 5<br />
x 6<br />
30<br />
27<br />
34<br />
31<br />
40<br />
35<br />
3<br />
22<br />
28<br />
29<br />
2<br />
7<br />
97,9<br />
107,4<br />
135,5<br />
127<br />
128,5<br />
117,7<br />
Tabelul 6.3<br />
În această fază X 3 este reflectat, procesul fiind continuat până când cinci<br />
puncte sunt eliminate, obŃinându-se optimul căutat:<br />
a 1 =22;<br />
a 2 =8;<br />
V=77,57.<br />
Pentru a verifica faptul că acest punct reprezintă valoarea optimă, se restartează<br />
procesul <strong>cu</strong> acest punct <strong>de</strong> start. Figura 6.27, arată marginile noului spaŃiu <strong>de</strong> proiectare<br />
care este redus la jumătate faŃă <strong>de</strong> spaŃiul iniŃial, adică:<br />
20≤a 1 ≤35<br />
1≤a 2 ≤16.<br />
Setul P şi performanŃele optimizării sunt prezentate în figura 6.28, procedura<br />
terminându-se rapid datorită faptului că punctul <strong>de</strong> start este <strong>de</strong> fapt soluŃia optimală.<br />
Pentru fiecare nou punct este trasată valoarea funcŃiei obiectiv (volumul sistemului <strong>de</strong><br />
bare). Primele 6 puncte sunt generate aleator, neexistând tendinŃa <strong>de</strong> minimizare în faza<br />
<strong>de</strong> iniŃiere. În faza <strong>de</strong> <strong>optimizare</strong> propriu-zisă, <strong>de</strong>oarece fiecare nou punct are<br />
performanŃe mai bune <strong>de</strong>cât cel mai slab punct, existent <strong>de</strong>ja, este posibilă apariŃia unor<br />
maxime locale, <strong>de</strong>plasarea setului P către optim fiind mai rapidă la începutul fazei <strong>de</strong><br />
<strong>optimizare</strong>. La restartare, setul P are performanŃe mai slabe <strong>de</strong>cât setul anterior<br />
restartării, optimul fiind însă <strong>de</strong>terminat într-un număr redus <strong>de</strong> paşi.<br />
EvoluŃia numărului <strong>de</strong> puncte din P (v.fig. 6.28) arată că la punctul 38<br />
(sfârşitul primului ciclu), în P încă există toate punctele concentrate în jurul valorii <strong>de</strong><br />
optim, la punctul 58 existând un singur punct final (valoarea <strong>de</strong> optim).