à¸à¸à¸à¸µà¹2 fin..
à¸à¸à¸à¸µà¹2 fin..
à¸à¸à¸à¸µà¹2 fin..
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
บทที่2ทฤษฎีที่เกี่ยวของ2.1 มอเตอรเหนี่ยวนํา 3 เฟส (Three Phase Induction Motor)มอเตอรเหนี่ยวนําเปนมอเตอรที่นิยมใชมากที่สุด ซึ่งมอเตอรที่เกิดจากการเหนี่ยวนํานี้อาจเปนมอเตอรเหนี่ยวนําเฟสเดียว หรือมอเตอรเหนี่ยวนําหลายเฟส (Poly Phase Induction Motor) ก็ไดมอเตอรเหนี่ยวนําหลายเฟสนั้นโดยมากแลวจะเปนมอเตอรเหนี่ยวนํา 3เฟส ซึ่งมีขอดี และขอดอยคือขอดี (Advantage)1. เปนมอเตอรชนิดที่สรางขึ้นไดงาย และ ทนทาน โดยเฉพาะชนิดกรงกระรอก (Squirrel-cageType)2. ราคาไมแพง และไมเสียงาย3. มีประสิทธิภาพที่สูงพอในสภาวะที่มอเตอรหมุนปกติ ไมมีแปรงถานดังนั้นการสูญเสีย เนื่องจากความฝดจึงลดลงหรือมีคานอยมาก และมีเพาเวอรแฟกเตอรดี4. ตองการการดูแล และบํารุงรักษาต่ํา5. สามารถที่จะเริ่มหมุน(Start) ไดงาย โดยเฉพาะชนิดกรงกระรอกขอดอย (Disadvantage)1. ความเร็วรอบของมอเตอรไมสามารถที่จะเปลี่ยนแปลงไดอันเนื่องมาจากความถี่หลักมูลของแรงดันไฟฟาสลับที่จายใหกับมอเตอรไมสามารถปรับเปลี่ยนได2. มีคุณสมบัติเหมือนกับมอเตอรไฟฟากระแสตรงแบบชันต ความเร็วรอบจะลดลงหรือเพิ่มขึ้นจะขึ้นอยูกับโหลด3. แรงบิดในขณะเริ่มหมุนของมอเตอรเหนี่ยวนําคอนขางต่ํากวาแรงบิดขณะเริ่มหมุนของมอเตอรไฟฟากระแสตรงแบบชันต
62.2 โครงสรางของมอเตอรเหนี่ยวนํา 3 เฟสมอเตอรเหนี่ยวนํา 3เฟสประกอบดวยสวนประกอบหลัก 2 สวนดวยกันคือ2.2.1 สเตเตอรหรือสวนที่อยูกับที่ (Stator)2.2.2 โรเตอรหรือสวนที่หมุน(Rotor)2.2.1 สเตเตอรหรือสวนที่อยูกับที่สเตเตอรของมอเตอรเหนี่ยวนํา 3เฟสใชหลักการเดียวกันกับของซิงโครนัสมอเตอร หรือเครื่องกําเนิดไฟฟากระแสสลับ โดยทํามาจากแผนเหล็กบางๆอัดซอนเขาดวยกัน และทําเปนชองสลอตไวบรรจุขดลวด และจํานวนขั้วแมเหล็กจะเปนตัวกําหนดความเร็วรอบของมอเตอรเมื่อเราจายไฟฟากระแสสลับใหกับขดลวดที่สเตเตอร จะทําใหเกิดสนามแมเหล็กที่คงที่คาหนึ่ง และสนามแมเหล็กนี้จะหมุน (Revolves or Rotate) ดวยความเร็วที่เรียกวาความเร็วซิงโครนัส และหาไดโดยNSS120 fP= (2.1)N = ความเร็วซิงโครนัสf = ความถี่หลักมูลของไฟฟากระแสสลับP =จํานวนขั้วแมเหล็กของมอเตอรสนามแมเหล็กที่หมุนจะเหนี่ยวนําแรงดันไฟฟาขึ้นในโรเตอร ซึ่งเปนไปตามกฎของการเหนี่ยวนํา2.2.2 โรเตอร หรือสวนที่หมุนโรเตอรของมอเตอรเหนี่ยวนํา 3เฟส แบงออกเปน 2 ชนิดคือก. โรเตอรแบบกรงกระรอก มอเตอรที่ใชโรเตอรชนิดนี้เราเรียกวา มอเตอรเหนี่ยวนําแบบกรงกระรอก โดยประมาณ 90% ของมอเตอรเหนี่ยวนําจะใชโรเตอรเปนแบบกรงกระรอก ทั้งนี้เปนเพราะวาโรเตอรชนิดนี้เปนชนิดที่ทําไดงายและทนทานที่สุด โรเตอรชนิดนี้ประกอบดวยแผนเหล็กบางๆอัดซอนกันเปนรูปทรงกระบอก และถูกทําใหเปนชองสลอตใหขนานกันเพื่อสําหรับฝงหรือบรรจุตัวนําโรเตอร (Rotor Conductor) ลงในชองสลอตนั้น ตัวนําที่ฝงนี้จะไมมีลักษณะเปนเสนหรือเปนสาย แตจะเปนแทงทองแดงหรืออลูมินั่ม หรืออัลลอย (Copper Bar or Aluminum Bar or
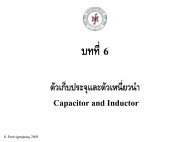
Alloy) โดยในหนึ่งสลอตจะบรรจุแทงทองแดง หรือ อลูมิเนียมเพียง 1 แทงเทานั้น และที่ปลายสุดของแทงตัวนําทั้งสองดานนั้นในแตละดานจะถูกตอปลายลัดวงจรเขาดวยกันโดยการบัดกรี(Brazed) หรือเชื่อมดวยไฟฟาโรเตอรของมอเตอรแบบกรงกระรอกนี้แทงตัวนําจะถูกลัดวงจรไวอยางถาวร ดังนั้นจึงไมสามารถที่จะนําความตานทานจากภายนอกมาตออนุกรมเขากับวงจรโรเตอรเพื่อชวยในการเริ่มหมุนได สลอตของโรเตอรจะไมอยูในลักษณะที่ขนานกับเพลา แตจะวางใหมีลักษณะเฉียงเล็กนอย เพื่อใหเกิดประโยชนได2ทาง1) จะชวยใหมอเตอรหมุนไดอยางเร็ว โดยการลดการเกิดเสนแรงแมเหล็กฮัม(Magnetic Hum)2) จะชวยในการลดการเกิดยึด หรือล็อกของโรเตอรอันเนื่องมาจากสนามแมเหล็กที่ตกคางอยูที่ฟน(Teeth) ของสเตเตอรกับโรเตอรทั้งสองสวนแบบอื่นๆของโรเตอรที่มีลักษณะคลายกันกับโรเตอรแบบกรงกระรอกนั้นประกอบดวยโซลิดไซลินเดอร (Solid Cylinder) ของแทงเหล็ก (Steel) ซึ่งปราศจากสลอตสําหรับบรรจุตัวนําทั้งหมดมอเตอรจะหมุนไดขึ้นอยูกับผลของการเกิดกระแสไหลวนในเหล็กของโรเตอรข. โรเตอรแบบพันขดลวดหรือเฟสวาวดโรเตอร (Wound Rotor or Phase Wound Rotor)มอเตอรที่ใชโรเตอรชนิดนี้เรียกวามอเตอรเหนี่ยวนําแบบโรเตอรพันขดลวด หรือเฟสวาวลมอเตอร หรือสลิปริงมอเตอร (Wound Rotor or Phase Wound Rotor or Slip-ring Motor) โรเตอรชนิดนี้จะพบมากในมอเตอรเหนี่ยวนํา 3เฟส และมีการพันแบบชุดขดลวดสองชั้นเหมือนกับขดลวดที่ใชในเครื่องกําเนิดไฟฟากระแสสลับ ในโรเตอรชนิดนี้ภายในจะตอแบบสตาร และมีปลายสายออกมา 3 ปลายตอเขากับสลิปริงที่ติดกับเพลาของโรเตอรนั้น และโรเตอรแบบโรเตอรพันขดลวดสามารถที่จะนําความตานทานที่ตอแบบสตารตอเขากับสลิปริงของโรเตอร เพื่อชวยในการเริ่มหมุนของมอเตอร เปนการเพิ่มแรงบิดขณะเริ่มหมุนของมอเตอรนั้น ความตานทานที่นํามาตอเขาไปนี้มีลักษณะการตอดังแสดงในรูปที่ 2.1 แตเมื่อมอเตอรเริ่มหมุนไปแลว และหมุนดวยความเร็วปกติแลวสลิปริงจะถูกลัดวงจรกลายสภาพเปนโรเตอรแบบกรงกระรอก7
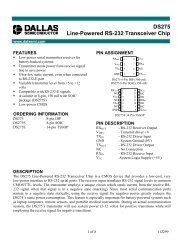
8รูปที่ 2.1 แสดงการตอความตานทานจากภายนอกเขากับโรเตอรแบบพันขดลวด2.3 สนามแมเหล็กหมุนของมอเตอรเหนี่ยวนํา 3 เฟสสนามแมเหล็กของมอเตอรเหนี่ยวนํา 3 เฟส เมื่อมีกระแสไฟฟาระบบ3เฟสจายใหกับขดลวด 3 เฟส เปนผลทําใหเกิดสนามแมเหล็กหมุนในมอเตอรนั้น สนามแมเหล็กหมุนจะตัดกับตัวนําในโรเตอรนั้นทําใหเกิดกระแสไฟฟาเหนี่ยวนําขึ้นในตัวนําที่ฝงอยูในโรเตอร และจะเกิดสนามแมเหล็กขึ้นในโรเตอร เพราะที่โรเตอรมีกระแสไฟฟาเหนี่ยวนําไหลอยู ซึ่งจะทําใหเกิดสนามแมเหล็กเปนขั้วเหนือและขั้วใตเชนเดียวกับที่สเตเตอร และสนามแมเหล็กที่หมุนที่สเตเตอรนั้นจะเกิดการผลัก และดูดกับขั้วแมเหล็กที่เกิดขึ้นที่โรเตอรในทิศทางของสนามแมเหล็กหมุน ผลที่ไดของการดูด และผลักระหวางขั้วแมเหล็กบนสเตเตอรและโรเตอรทําใหเกิดแรงบิดขึ้นหลักการหมุนของสนามแมเหล็กโดยกระแสไฟฟา 3เฟสจากรูปที่ 2.2 เปนการแสดงใหเห็นวาถาเราจายกระแสไฟฟาในระบบ 3 เฟสใหกับขดลวดในสเตเตอร ในชวงขณะหนึ่ง สมมติใหเปนครึ่งไซเคิลบวกดังแสดงในรูปที่ 2.2 ดานขวามือ โดยการตอไฟฟาเฟส A เขาการเฟส A ของมอเตอรและเฟส B เฟส C เขากับมอเตอรในเฟสถัดไป เมื่อกระแสไฟฟาในครึ่งไซเคิลบวกเฟส A ไหลเขา
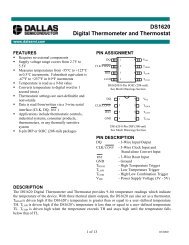
9รูปที่ 2.2 แสดงการจายแรงดันไฟฟา3เฟสใหกับมอเตอรเหนี่ยวนํา3เฟสไปในขดลวดของเฟส A มอเตอร จะทําใหเกิดมีกระแสไฟฟาไหลผานขดลวดในเฟส A ของมอเตอรนั้นทําใหเกิดขั้ว N ขึ้น และเมื่อแรงดันไฟฟาในเฟส A ที่จายใหกับเฟส A มอเตอรคอยๆลดลงอํานาจแมเหล็กขั้ว N ก็จะคอยๆลดอํานาจ หรือความเขมลง และในขณะเดียวกันที่เฟสถัดไปก็จะมีอํานาจแมเหล็กคลายๆกับเฟส A แตในเวลาถัดไปจนครบ 3 เฟสในหนึ่งขั้วแมเหล็กของมอเตอร (คือเฟสA เฟส B และเฟส C) และเมื่อมีการเปลี่ยนแปลงของแรงดันไฟฟาในครึ่งไซเคิลบวกสิ้นสุดเรียบรอยแลว ในครึ่งไซเคิลลบถัดไปที่ขั้วแมเหล็กดังกลาวขางตนก็จะเปลี่ยนสภาวะจากขั้ว N ไปเปนขั้ว S และในอีกหนึ่งขั้วแมเหล็กถัดไปก็มีลักษณะเชนเดียวกันกับขั้วแมเหล็กแรกที่กลาวถึง ซึ่งลักษณะเชนนี้เหมือนกับวาสนามแมเหล็กหมุนไปรอบๆสเตเตอร ซึ่งสนามแมเหล็กที่เหมือนกับหมุนไปรอบๆนี้เรียกสั้นๆวาสนามแมเหล็กหมุน (Rotating Magnetic Field)รูปที่ 2.3 แสดงรูปคลื่นไซนของสนามแมเหล็กที่เกิดขึ้นโดยกระแสไฟฟา 3 เฟส
10รูปที่ 2.4 แสดงการเกิดสนามแมเหล็กหมุนของมอเตอร 3 เฟส 2 ขั้วจากรูปที่ 2.3 และรูปที่ 2.4 เปนการแสดงถึงการเกิดสนามแมเหล็กหมุนของมอเตอร 3 เฟส2 ขั้ว ที่สามารถพิจารณาทีละขั้นไดคือที่จุดที่1 บนรูปไซเคิลไซนจะเห็นไดวาเฟส B อยูที่ตําแหนงความเขมสูงสุดของขั้วเหนือเฟส A ก็เปนขั้วเหนือ แตลดลงจากจุดสูงสุดและเฟส C เปนขั้วเหนือและกําลังเพิ่มขึ้น ดังแสดงในรูปที่ 2.4 (ก) ของสเตเตอรคือเฟส B เปนขั้วเหนือมาก เฟส A และเฟส C เปนขั้วเหนือนอยที่จุดที่2 บนรูปคลื่นไซน เฟส A เปน 0 (Zero) เฟส B เปนขั้วเหนือแตกําลังลดลง สวนเฟสC เปนขั้วเหนือแตกําลังเพิ่มขึ้นดังแสดงในรูปที่ 2.4 (ข) ของสเตเตอร เฟส A เปน 0 เฟส B และเฟสC เปนขั้วเหนือและมีความเขมเทากัน ซึ่งจะเกิดขึ้นระหวาง 2เฟสคือ เฟส B กับเฟส C ดังนั้นจากจุดที่ 1 ไปจุดที่ 2 ขั้วเหนือจะเคลื่อนที่ไป 30 องศาไฟฟา ในทิศทางตามเข็มนาฬิกา (30 ElectricalDegree Clockwise)ที่จุดที่ 3 บนรูปคลื่นไซน เฟส C จะมีความเขมสูงสุดของขั้วเหนือ เฟส B ลดลงจากสูงสุดและเฟส A เพิ่มขึ้นแต เฟส A เปนขั้วใต ดังแสดงในรูปที่ 2.4 (ค) ของสเตเตอรเฟส C จะเปนขั้วเหนือและมีความเขมมาก สวนเฟส B มีความเขมของขั้วเหนือนอย และเฟส A เปนขั้วใตนอยดังนั้นจากจุดที่ 2 ไปจุดที่ 3 ขั้วเหนือจะเคลื่อนที่ไป 30 องศาไฟฟา ในทิศทางตามเข็มนาฬิกาบนรูปคลื่นไซนที่จุดตางๆในไซเคิลก็จะเกิดหมุนเวียนกันไปเชนเดียวกับที่กลาวมาแลวตัวอยางเชน ที่จุดที่ 6 ในรูปที่ 2.3 บนรูปคลื่นไซน เฟส A และ เฟส B จะเปนขั้วใต สวนเฟส C จะเปน 0 ดังแสดงในรูปที่ 2.4 (ฉ) ของสเตเตอรขั้วเหนือจะเคลื่อนที่ไป 150องศาไฟฟาในทิศทางตามเข็มนาฬิกาจากจุดที่ 1 เปนอันวาครบไซเคิลของขั้วเหนือ หรือหมุนครบ 1 รอบ 360 องศา
112.4 สลิป (Slip, S)ในทางปฎิบัตินั้นโรเตอรไมสามารถหมุนไดเทากับความเร็วของสนามแมเหล็กหมุนที่สเตเตอร โดยปกติแลวความเร็วของโรเตอรจะมีความเร็วนอยกวาความเร็วของสนามแมเหล็กที่หมุนที่สเตเตอร ความแตกตางของความเร็วนั้นจะขึ้นอยูกับโหลดที่ตออยูกับมอเตอรนั้นความแตกตางระหวางความเร็วของสนามแมเหล็กที่หมุนอยูที่สเตเตอร หรือความเร็วซิงโครนัส( NS) และความเร็วรอบของโรเตอรขณะใชงาน (Actual Speed : N ) ของโรเตอรเรียกวาสลิป สลิปของมอเตอรโดยปกติเปนเปอรเซ็นต ซึ่งเปอรเซ็นตสลิปสามารถหาไดจากสมการดังนี้คือSN − NN= S SNS− N% Slip = × 100NS(2.2)แตในบางครั้ง NS− N ก็เรียกวา ความเร็วสลิป (Slip Speed)จะเห็นไดวาความเร็วของโรเตอร (มอเตอร) คือ N = N ( 1−S )2.5 มอเตอรเหนี่ยวนํากระแสสลับ 1เฟสSมอเตอรเหนี่ยวนํากระแสสลับแบบหนึ่งเฟสมีโครงสรางคลายกับมอเตอร3เฟส แตมีขอแตกตางกันตรงที่สเตเตอรของแบบ 1เฟสมีการพันขดลวดในลักษณะแบบเฟสเดียว และตอเขากับแหลงจายไฟฟากระแสสลับเพียง 1เฟส ดังนั้นสนามแมเหล็กที่เกิดขึ้นที่สเตเตอรจึงไมใชสนามแมเหล็กที่หมุนดวยความเร็วซิงโครนัสเหมือนกับในกรณีของมอเตอร 2เฟส หรือ 3เฟสที่ไดรับแรงดันไฟฟากระแสสลับ 2เฟส หรือ 3เฟส จึงเปนเหตุใหสนามแมเหล็กที่เกิดการกลับไปกลับมาอยูที่สเตเตอรนั้นไมสามารถทําใหมอเตอรเกิดแรงบิด และหมุนขึ้นไดในขณะที่โรเตอรนั้นยังหยุดอยู ซึ่งเปนสาเหตุวามอเตอรเหนี่ยวนํา 1เฟสไมสามารถเริ่มหมุนไดดวยตัวมันเอง แตจะหมุนไดก็ตอเมื่อโรเตอรถูกทําใหหมุนดวยกรรมวิธีใดวิธีหนึ่ง ซึ่งหมายถึงตองทําใหเริ่มหมุนดวยมือหรืออุปกรณอื่นๆ กอน และเมื่อมอเตอรถูกชวยทําใหหมุนไปทิศทางใดทิศทางหนึ่งกอนแลว จะทําใหเกิดแรงบิดและอัตราเรงขึ้นในโรเตอรนั้นจนกระทั่งไดความเร็วเต็มพิกัดของมัน
122.6 ทฤษฎีสนามแมเหล็กขวางของมอเตอรเหนี่ยวนํา 1เฟสจากรูปที่ 2.5(ก) ถาโรเตอรอยูในสนามแมเหล็กที่เกิดขึ้นเนื่องจากไฟฟากระแสสลับ จะทําใหเกิดแรงดันไฟฟาเหนี่ยวนําขึ้นในโรเตอร (ลักษณะคลายกับกรณีของหมอแปลงไฟฟา) พรอมกับสงผลใหเกิดกระแสไฟฟาไหลในโรเตอรและเกิดสนามแมเหล็กในโรเตอร โดยที่สนามแมเหล็กที่เกิดขึ้นจากการเหนี่ยวนํานี้จะมีทิศทางตรงกันขามกับสนามแมเหล็กที่สเตเตอรและมีคาเทากันผลลัพธที่เกิดขึ้นที่โรเตอรนั้นคือโรเตอรจะไมหมุน เนื่องจากการหักลางกันระหวางสนามแมเหล็กที่สเตเตอรกับโรเตอร ดังนั้นจึงไมเกิดการหมุนหรือไมเกิดแรงบิดเริ่มหมุนขึ้นในมอเตอร แตแรงบิดจะเกิดขึ้นในโรเตอรและโรเตอรหมุนได โดยการที่ตัวนํา ในโรเตอรตัดกับสนามแมเหล็กซึ่งทําใหเกิดแรงดันไฟฟาเหนี่ยวนําขึ้น กระแสไฟฟาจะไหลอยูในแทงตัวนําในโรเตอร ถาตัวนําที่โรเตอรถูกทําใหหมุนไปจากตําแหนง A ไปยังตําแหนง B ซึ่งทํามุมฉากกับตําแหนงเดิม ตัวนําโรเตอรจะเกิดการตัดผานสนามแมเหล็กที่สเตเตอรดังแสดงในรูปที่ 2.5(ข) ในขณะเดียวกันสนามแมเหล็กก็จะแยกออกเปน 2 ระบบคือตางเฟสกันอยู 90 องศา และกระแสไฟฟาในสเตเตอรและโรเตอรก็จะมีเฟสที่ตางกัน อยางไรก็ตามในความเปนจริงแลวกระแสไฟฟาที่โรเตอรจะตางเฟสกับกระแสไฟฟาที่สเตเตอร เพราะเนื่องจากวาที่โรเตอรนั้นความถี่เปลี่ยนไป โดยที่ความถี่ของกระแสไฟฟาที่โรเตอรจะขึ้นอยูกับความเร็วรอบของโรเตอร ซึ่งผลลัพธที่ไดของเสนแรงแมเหล็กทั้งสองนี้แสดงไดดังรูปที่ 2.6รูปที่ 2.5 แสดงทิศทางของการเกิดของกระแสไฟฟาและเสนแรงแมเหล็กในโรเตอรของมอเตอรเหนี่ยวนําเฟสเดียว
13รูปที่ 2.6 แสดงรูปคลื่นของกระแสไฟฟาที่สเตเตอรและโรเตอรของมอเตอรเหนี่ยวนํามอเตอรเหนี่ยวนํากระแสสลับชนิด เฟสเดียว เปนมอเตอรชนิดทํางานโดยอาศัยแหลงจายไฟฟากระแสสลับเฟสเดียว ซึ่งสามารถแบงไดเปน 2 แบบก. เครื่องกลชนิดกรงกระรอก ไดแก สปลิตเฟสมอเตอร คาปาซิเตอรมอเตอร และเชดเดดโพลมอเตอร(Shaded Pole Motor)ข. เครื่องกลชนิดโรเตอรพันขดลวด ไดแก ซีรีสมอเตอร และรีพัลชั่นมอเตอรมอเตอรเหนี่ยวนําเฟสเดียวจะประกอบดวยขดลวด 2 ชุดคือ ขดลวดชุดสตารตหรือขดลวดชวย(Starting Winding or Auxiliary Winding) และขดลวดชุดรันหรือขดลวดหลัก(RunningWinding or Main Winding) ขดลวดทั้งสองวางทํามุมกัน 90 องศาทางไฟฟา และตอครอมเขากับแหลงจายไฟฟาเฟสเดียว ลักษณะตําแหนงของขดลวดแสดงในรูปที่ 2.7รูปที่ 2.7 ตําแหนงการวางขดลวดของมอเตอรเหนี่ยวนําเฟสเดียว
มอเตอรเหนี่ยวนําเฟสเดียวนี้ อาศัยความตางเฟสระหวางกระแสไฟฟาที่ไหลในขดลวดทั้งสองบนสเตเตอรที่วางทํามุมกัน 90 องศา ดังนั้นมอเตอรจะมีคุณสมบัติหรืออาการเชนเดียวกับมอเตอร 2 เฟสกระแสไฟฟาที่ไหลในขดลวดทั้งสองจะทําใหเกิดสนามแมเหล็กหมุน จึงทําใหมอเตอรสามารถเริ่มหมุนดวยตัวเองได2.7 คาปาซิเตอรสตารตและรันมอเตอร (Capacitor Start and Run Motor)14มอเตอรชนิดนี้เหมือนกันกับมอเตอรแบบคาปาซิเตอรสตารตมอเตอร โดยจะมีคาปาซิเตอรหรือตัวเก็บประจุตออนุกรมอยูกับขดลวดชุดสตารตตลอดเวลา ขอดีของการตอตัวเก็บประจุไวอยางถาวร ไดแกก. เปนการปรับหรือชวยใหมอเตอรทํางานเกินกวาโหลดปกติข. ใหเพาเวอรแฟกเตอรที่สูงกวาค. เกิดประสิทธิภาพที่สูงกวาง. ในขณะที่มอเตอรหมุนอยูจะไมกําเนิดเสียงที่ดังมากในกรณีที่มอเตอรที่ใชตัวเก็บประจุทั้งในขดสตารตและรันในตัวเดียวกันนี้เรียกวาคาปาซิเตอรรันมอเตอรชนิดคาเดียว (Single Value Capacitor Run Motor) แตในกรณีที่มอเตอรใชตัวเก็บประจุ 2ตัวโดยที่ขดสตารตใชตัวเก็บประจุที่มีคาความจุสูง แตสําหรับเวลาที่หมุนปกติใชตัวเก็บประจุที่มีคาความจุต่ํา โดยมอเตอรแบบนี้ถูกเรียกวาคาปาซิเตอรมอเตอรชนิด 2 คา (Two Value Capacitor RunMotor)2.8 คาปาซิเตอรรันมอเตอรชนิดคาเดียวมอเตอรชนิดนี้จะมีขดรันและขดสตารตอยางละชุด โดยขดลวดชุดสตารตจะมีตัวเก็บประจุตออนุกรมอยูดังแสดงในรูปที่ 2.8 โดยตัวเก็บประจุจะตออยูกับวงจรขดลวดชุดสตารตตลอดเวลาและจะไมมีสวิตชแรงเหวี่ยงหนีศูนย และตัวเก็บประจุนี้จะทําหนาที่ทั้งสตารตและรันตอเนื่องกันไป ขนาดของความจุของตัวเก็บประจุที่ใชจะมีคาประมาณ 2-20 ไมโครฟารัด ซึ่งเปนแบบน้ํามันหรือ แบบกระดาษ ซึ่งคุณลักษณะของมอเตอรดังแสดงในรูปที่ 2.9
15รูปที่ 2.8 แสดงวงจรของคาปาซิเตอรรันมอเตอรชนิดคาเดียวรูปที่ 2.9 แสดงคุณลักษณะระหวางแรงบิดกับเปอรเซนตความเร็วของคาปาซิเตอรรันมอเตอรชนิดคาเดียวคาปาซิเตอรรันมอเตอรชนิดคาเดียวนี้สามารถที่จะทําใหกลับทางหมุนไดงาย ดวยการใชสวิตชจากภายนอก แตขดรันและขดสตารตจะตองพันดวยลวดขนาดเดียวกัน โดยมันจะผลัดกันทําหนาที่เปนขดรันและขดสตารต เมื่อตองการใหหมุนในทิศทางตามเข็มนาฬิกาก็ปรับสวิตชไปที่ตําแหนง Fขดลวดชุด B จะทําหนาที่เปนขดรัน สวนขด A จะทําหนาที่เปนขดสตารต แตถาตองการใหหมุนในทิศทางทวนเข็มนาฬิกาก็ปรับสวิตชไปที่ตําแหนง R ขดลวดชุด A จะทําหนาที่เปนขดรัน และขดลวด B จะทําหนาที่เปนขดสตารต ดังแสดงในรูปที่ 2.10
16รูปที่ 2.10 แสดงวงจรการกลับทิศทางการหมุนของคาปาซิเตอรรันมอเตอรชนิดคาเดียว2.9 คาปาซิเตอรรันมอเตอรชนิด 2 คาคาปาซิเตอรมอเตอรชนิดนี้จะใชคาปาซิเตอรที่มีความจุมากตออนุกรมกับขดสตารตใชทําหนาที่สตารต แตขณะหมุนปกติจะใชคาปาซิเตอรที่มีความจุต่ํา โดยคาปาซิเตอรที่มีความจุต่ํานี้จะตอครอมเขากับสวิตชแรงเหวี่ยงหนีศูนย และคาปาซิเตอรสตารตดังในรูปที่ 2.11 คาปาซิเตอรสตารตคือคาปาซิเตอร A จะเปนชนิดอิเล็กโตรไลตมีคาความจุสูง (ทํางานชวงเวลาสั้น) และคาปาซิเตอร B เปนแบบน้ํามันมีคาความจุต่ํา(ทํางานตอเนื่อง) โดยทั่วไปคาปาซิเตอร A จะมีคาความจุประมาณ 10-15เทาของคาปาซิเตอร B ขณะที่เริ่มสตารตนั้นสวิตชแรงเหวี่ยงหนีศูนยจะคงปดวงจรอยูทําใหคาปาซิเตอรทั้งสองตอขนานกันอยู ดังนั้นคาความจุรวมจะมาก หลังจากที่มอเตอรหมุนไปประมาณ 75 เปอรเซ็นตของความเร็วสูงสุดแลว สวิตชแรงเหวี่ยงหนีศูนยจะเปดวงจรออก ยังคงเหลือคาปาซิเตอรB ตออยูกับวงจรของขดลวดชุดสตารตเพียงตัวเดียว ซึ่งจะทําใหขดลวดชุดสตารตกลายเปนขดลวดชุดรันดวยอีกชุดหนึ่ง มอเตอรชนิดนี้จะสามารถสตารตในขณะที่มีโหลดมากๆไดและขณะทํางานจะเงียบทําใหประสิทธิภาพสูง และมีเพาเวอรแฟกเตอรสูงดวย
17รูปที่ 2.11 แสดงวงจรของคาปาซิเตอรรันมอเตอรชนิด 2 คา2.10 การควบคุมอินเวอรแบบ PWM (Pulse Width Modulate)2.10.1 การเฉลี่ยเฉพาะที่แรงดันเอาทพุท Voของวงจรทอนระดับสัญญาณดังรูปที่ 2.12(ก)สามารถ เปลี่ยนแปลงไดระหวางคา 0 ถึงคา Vsโดยที่วัฏจักรงาน D มีคาระหวาง 0 ถึง 1 ถาเราให D เปนฟงกชั่นของเวลาd(t) โดยที่ d(t) มีการเปลี่ยนแปลงคาอยางชาๆ เมื่อเทียบกับคาบของการสวิตช ซึ่งถาเปนในกรณีเชนนี้เราสามารถสังเคราะหแรงดันเอาทพุท Voซึ่งมีคาเฉลี่ยจะเปนฟงกชั่นของเวลา และมีคาเทากับd(t) Vsอยางไรก็ตามเวลาในการเฉลี่ยคา Voจําเปนตองเปนชวงเวลาที่นานเมื่อเทียบกับคาบเวลาของการสวิตช T แตคาบเวลาดังกลาวจะตองสั้นกวาเมื่อเทียบกับคาบเวลาของ d(t)การเฉลี่ยคาแรงดันเอาทพุท Voในที่นี้หมายถึงการเฉลี่ยเฉพาะที่ (local averaging) และจะใชสัญลักษณ Vo() t สําหรับสัญลักษณ < V o> หมายถึงคาเฉลี่ยจริงซึ่งเปนคาคงตัว หรืออาจกลาวอีกนัยหนึ่งไดวา คาเฉลี่ยดังกลาวเปนคาเฉลี่ยเฉพาะที่ไดจากการกรองสัญญาณแรงดันเอาทพุทดวยวงจรกรองความถี่ต่ําผาน โดยขจัดความถี่สูงออกและคงเหลือไวแตสัญญาณความถี่ต่ําๆ เชนองคประกอบหลักมูล (fundamental component) ในขณะที่ถาสวนคาเฉลี่ยไดจากการกรองทุกความถี่ออก จะคงเหลือไวแตองคประกอบไฟตรงสําหรับวงจรทอนระดับสัญญาณแสดงในรูปที่ 2.12(ก) ถาเราใหวัฏจักรงาน d(t) เปนฟงกชั่นไซนูซอยด เราจะไดแรงดันเอาทพุทที่เปนองคประกอบไฟตรงบวกกับไซนูซอยด ไดดังนี้ถา dt () = 0.5+msinωtmaωaaV () t = 0.5V + mV sinωt ; 0.5o s a s aคือ amplitude modulationคือ frequency modulationam ≤ (2.3)a
18โดยมีเงื่อนไขดังนี้TLR2πω (2.4)aแรงดัน Vdเปนพัลสที่มีความถี่เทากับ 1/T แตมีความกวางพัลสที่ไมคงตัว เราเรียกรูปคลื่นที่วัฏจักรงานเปนฟงกชั่นของเวลาวารูปคลื่นสัญญาณ PWM คาเฉลี่ยเฉพาะที่ของรูปคลื่น PWMหรือ Vdจะเปนฟงกชั่นของเวลา ถาเราทําการกรอง Vdดวยวงจรกรองความถี่ต่ําผานที่ประกอบไปดวยอุปกรณ L และ R โดยมีพารามิเตอรเปนไปตามเงื่อนไขสมการที่ (2.4) ดังนั้นคาความถี่การสวิตชจะถูกกรองออกไปแตความถี่ ωaไมถูกลดทอนรูปที่ 2.12 การใชเทคนิค PWM กับวงจรทอนระดับ
ในรูปที่ 2.12(ข) Voคือคาเฉลี่ยเฉพาะที่ของรูปคลื่น PWM เนื่องจาก dt () เปนฟงกชั่นไซนูซอยด คาเฉลี่ยเฉพาะที่ของรูปคลื่น PWM จึงเปนรูปไซนูซอยดดวย แต dtอาจเปนฟงกชั่นของ()เวลาใดๆ (ที่เปนไปตามเงื่อนไขสมการที่ (2.4)) Vo() t ก็จะเปนฟงกชั่นที่เหมือนกับ dt ()อยางไรก็ดี แรงดันเอาทพุท Voของวงจรทอนระดับสัญญาณยังมีองคประกอบไฟตรงผสมอยู (เปนไปตามสมการที่ (2.3) และรูปที่ 2.12 (ข)) ดังนั้นการกําจัดองคประกอบไฟตรงสามารถทําไดโดยการตอวงจรทอนระดับ 2 วงจร โดยที่สัญญาณมอดดูเลตของวงจรทั้งสองมีเฟสตางกัน 180 O(ดังแสดงในรูปที่ 2.12 (ค)) เมื่อนําสัญญาณดานเอาทพุทมาลบกับ จะสงผลใหแรงดันไฟตรงก็จะหักลางกันไปเหลือแตแรงดันไฟสลับ อยางไรก็ดี เนื่องจากกระแสดานออก i oเปนกระแสสลับวงจรทอนระดับที่ใชจะตองเปนชนิดที่กําลังงานไหลได 2 ทิศทาง กลาวคือ แตละวงจรใชสวิตช ที่กระแสไหลได 2 ทางจํานวน 2 ตัวถาใหสัญญาณมอดดูเลตเปนฟงกชั่นใดๆ แตองคประกอบความถี่สูงสุดยังเปนไปตามเงื่อนไขสมการที่ (2.4) แรงดันดานออกจะเปนฟงกชั่นเดียวกับสัญญาณมอดดูเลตเพียงแตจายกําลังไดมากขึ้น ในแงนี้วงจรทําหนาที่เปนวงจรขยายกําลังแบบวีธีสวิตช (Switch modepower amplifier)19mfff= (2.5)amf= อัตราการมอดดูเลตความถี่f = ความถี่การสวิตชf = ความถี่การมอดดูเลตa2.11 อินเวอรเตอร 3 เฟส2.11.1 วงจรและรูปคลื่นสัญญาณอินเวอรเตอร 3 เฟสเหมาะสําหรับกรณีที่ตองการกําลังไฟฟาสูง ซึ่งโครงสราง และรูปคลื่นสัญญาณของวงจรอินเวอรเตอร 3 เฟสแสดงอยูในรูปที่ 2.13 (ก)เทคนิค PWM สามารถใชไดกับวงจรอินเวอรเตอร 3 เฟส ไมวาจะเปนเทคนิคไซนตัดสามเหลี่ยม หรือเทคนิคการกําจัดฮารมอนิกต่ํา หรือการควบคุมรูปคลื่นของกระแสรูปที่ 2.13(ข) แสดงหลักการของเทคนิคไซนตัดสามเหลี่ยม เรามีรูปสามเหลี่ยม VTซึ่งมีความถี่เทากับความถี่การสวิตช และมีสัญญาณอางอิงรูปไซน 3 สัญญาณไดแกคือ VrA, VrBและ) เปนตัวกําหนดการVrCซึ่งมีมุมเฟสตางกัน 120 O โดยมีจุดตัดระหวาง VTกับ VrA( VrBและ VrCตัดตอวงจรของสวิตช Q 1 Q 4 (Q 3 Q 6 และ Q 5 Q 2 ตามลําดับ) รูปคลื่นของแรงดัน VAG, VBG(G คือสายลบของแหลงแรงดันไฟตรง) และ V แสดงอยูในรูปที่ 2.13(ค) สังเกตไดวาองคประกอบหลักAB
มูลของ VAGหรือ VAG1มีแอมพลิจูดเทากับคาที่แสดงในสมการที่(2.6) ( VAGตางกับ VAOเพียงคาแรงดันไฟตรง Vs/2)20V= mV ; 0.5AG1a sm ≤ (2.6)aแรงดันสายV ABมีองคประกอบหลักมูลเทากับV AB1แอมพลิจูดของ VAB1เทากับ 3 ของแอมพลิจูดของ VAG1เนื่องจาก VAGและ VBGมีเฟสตางกัน 120 O และ VAB1มีเฟสลาหลัง VAG1อยู30 O (แสดงในรูปที่ 2.13(ค)) ดังนั้นVAB1 3mVa s= ; 0.5m ≤ (2.7)aในการออกแบบระบบ โดยทั่วไปนิยมเลือกอัตราการมอดดูเลตความถี่ m f เปนเลขคี่และเปนพหุคูณของ 3 และใหความลาดชันของ VTและ Vrณ จุดที่แรงดันทั้งสองมีคาเปนศูนยมีเครื่องหมายตรงกันขามกัน(แสดงในรูปที่ 2.13 (ข)) ในกรณีนี้ถา ma≤ 0.5 สเปกตรัมของ VABจะเปนดังแสดงในรูปที่2.13 (ง) นอกจากนี้สังเกตไดวาฮารมอนิกต่ําสุดเกิดขึ้นที่ความถี่ ( mf± 2 k)faตารางที่ 2.1 แสดงฮารมอนิกของแรงดันสายของอินเวอรเตอร 3เฟส สําหรับอินเวอรเตอร 3เฟสเราอาจจะออกแบบใหวงจรทํางานถึงในยานการมอดดูเลตเกิน เพื่อใหไดแรงดันเอาทพุทที่มีคาสูงขึ้นสวนขอเสียที่เนื่องมาแตฮารมอนิกที่เพิ่มขึ้นมักจะพอยอมรับไดถาโหลดมีลักษณะเปนตัวเหนี่ยวนําโดยมีคาคงตัวเวลาที่เปนไปตามเงื่อนไขสมการที่ (2.4)กระแสโหลดจะเปนรูปใกลเคียงไซนโดย ทิศทางของกระแสโหลดเปนตัวกําหนดการนํากระแสของไดโอด เชน กรณีที่เฟสของโหลดเทากับ 30 O (ตามลาหลัง) รูปคลื่นจะเปนดังแสดงในรูปที่ 2.7โดยสังเกตไดวาในชวงเวลาที่i c> 0 และ VCG= 0 (Q 2 หรือ D 2 นํากระแส) แตทิศทางของ i cแสดงวา D 2 นํากระแส (แสดงในรูปที่2.13 (ก))
21รูปที่ 2.13 วงจรและรูปคลื่นสัญญาณของอินเวอรเตอร 3 เฟสแบบ PWMเมื่อพิจารณารูปคลื่นสัญญาณในรูปที่ 2.13 จะพบวา ในบางชวงเวลาดังแสดงในรูปลางสวิตชจะตอกิ่งทั้งสามของโหลดเขากับขั้วลบของแหลงจาย Vs(เชน เมื่อ Q,Q,Qนำกระแส)4 6 2และบางชวงเวลาสวิตชจะตอกิ่งทั้งสามของโหลดเขากับขั้วบวกของแหลง Vs(เชน เมื่อ Q,Q,Q1 3 6นำกระแส) ซึ่งในชวงเวลาดังกลาว กระแสอินพุทของอินเวอรเตอร ( i dในรูปที่ 2.13(ก)) มีคาเปนศูนย หมายความวากําลังงานไมไหลจากแหลงจายสูโหลด ซึ่งระยะเวลาของการควบคุมชวงเวลาดังกลาวเปนการควบคุมกําลังงานที่จายใหแกโหลด หรือควบคุมคาองคประกอบหลักมูลของแรงดันเอาทพุทนั่นเอง
ตารางที่ 2.1 อัตราสวนระหวางคา RMS ของฮารมอนิกกับ V S ของแรงดันสายของอินเวอรเตอร 3เฟส22รูปที่ 2.14 รูปคลื่นของแรงดัน และกระแสของอินเวอรเตอร 3 เฟส แสดงชวงกําลังงานไมไหลสูโหลด
232.12 หลักการของการควบคุมทางเวคเตอรของมอเตอรเหนี่ยวนําไฟฟากระแสสลับ 1เฟสเนื่องจากมอเตอรเหนี่ยวนําแบบคาปาซิเตอรมอเตอร จะมีชุดขดลวด 2 ชุด คือ ขดหลัก(Main , Run) ขดชวย(Auxiliary , Start) ดังแสดงรูปที่ 2.15 โดยมีตัวเก็บประจุตอรวมกับขดรันเพื่อใหเกิดมุม θ ระหวางขดลวดทั้งสอง และเพื่อใหเกิดแรงบิดในการขับเคลื่อนมอเตอรMotorV RunCapStartRun~ 90 oV Startรูปที่ 2.15 โครงสรางมอเตอรและเวคเตอรแรงดันระหวางขด Run กับขด Startแตในการควบคุม เราจะออกแบบใหมอเตอรมีประสิทธิภาพสูงสุดโดยใหมุมของแรงดันระหวางทั้งสองขดมีขนาด 90 o โดยใชโครงสรางของสวิตช 3 เฟส เพื่อสรางแรงดัน 2 ชุด ดังกลาวโดยไมตองดัดแปลงโครงสรางของมอเตอรเดิมดังรูปที่ 2.16DC Bus+VAC--VBC+VAN VCN VBNAuxMainNรูปที่ 2.16 โครงสรางสวิตช 3 เฟส
24AθNφCBรูปที่ 2.17 เวคเตอรแสดงแรงดันการควบคุมมอเตอรจากรูปที่ 2.17 ขนาดของ VACและ VBCจะไดจากการวัดแลวนํามาทํามุมกัน 90 O ตอมาเราทําการสรางเวคเตอร VAN, VBNและ VCNโดยที่จุด N จะอยูกึ่งกลางระหวาง A กับ B จากนั้นเราทําการปรับมุม θ เพื่อใหได ผลลัพธของมุมระหวาง VACและ VBCยังมีคา 90 o ซึ่ง VAN, VBNและ VCNจะเปนแรงดันที่ถูกสรางขึ้นมาจากการมอดดูเลชั่นเพื่อไปจายใหกับมอเตอร 1 เฟส2.13 Space Vector Modulation (SVM)หลักการของวิธี Space vector modulation (SVM) มีความแตกตางจากหลักการของวิธีPWM โดยอินเวอรเตอรที่ใชวิธี PWM จะมีชุดขับแบบ push-pull 3 ชุด ซึ่งแตละชุดสรางสัญญาณควบคุมที่แยกอิสระกัน ในขณะที่วิธี SVM จะพิจารณาอินเวอรเตอรเปนชุดขับเพียงหนึ่งชุดเทานั้นโดยที่อินเวอรเตอรสามารถที่จะถูกขับไดถึง 8 สเตต ดังแสดงในตารางที่ 2.2 การเรียงสวิตชเปนไปตามรูปที่ 2.19ตารางที่ 2.2 ชวงเวลาการสวิตช ของอินเวอรเตอรไฟสลับ 3 เฟส
25ในการควบคุมการสวิตชของวิธี SVM นั้นทําในระบบดิจิตอล ซึ่งกลาวไดวา SVM เปนเทคนิคการมอดดูเลตแบบดิจิตอล โดยมีเปาหมายในการสรางแรงดันไฟฟา PWM ใหกับโหลด โดยที่คาแรงดันไฟฟาดังกลาวที่จายใหกับโหลดจะเปนคาเฉลี่ย ซึ่งการสรางสัญญาณ PWM ดังกลาวจะเสร็จสิ้นภายในแตละคาบเวลาสุม (sampling period) โดยพิจารณาจากการเลือกสเตตการสวิตชและการคํานวณคาบเวลาของสเตตที่เหมาะสม ซึ่งคํานวณไดจากการแปลงเวคเตอรปริภูมิ (spacevector transformation)การแปลงปริภูมิพิจารณาฟงกชั่นทางเวลา3 ฟงกชั่นที่มีคุณสมบัติเปนไปตามสมการu () t u () t u () t 0+ + = (2.8)a b cการอธิบายเวคเตอรดังกลาวสามารถแสดงในปริภูมิสองมิติ ซึ่งพิกัดจะเหมือนกับแรงดันไฟฟา 3 เฟส อาทิเชน เวคเตอร [ u 0 0] Taวางอยูบนแกน X เวคเตอร [0 u 0] Tbมีเฟสตาง0ไป 120 และเวคเตอร[0 0 u ] T0มีเฟสตาง 240 จากเวคเตอรตัวแรก ดังแสดงในรูปที่ 2.18cเวคเตอร SV ในรูปแบบของจํานวนเชิงซอนแสดงไดตามสมการ2ut u ue ue3j(2/3) π − j(2/3)π() [a b c]= + + (2.9)โดยที่ 2/3 เปน scaling factor สมการ (2.9) สามารถเขียนใหอยูในรูปองคประกอบของจํานวนจริงและจํานวนจินตภาพในโดเมน x − y ไดดังนี้ut () = ux + juy(2.10)พิจารณาสมการ (2.9) และ (2.10) เราสามารถแปลงพิกัดจาก a− b− cไปเปน x − y ดังนี้
26⎛ −1 −1⎞1⎛ ua⎞⎛u⎞x2⎜2 2⎟⎜ ⎟= ⎜⎟ u⎜ bu ⎟y3 3 3⎝ ⎠ − ⎟0⎜ u ⎟⎜ ⎟⎝ c ⎠⎝ 2 2 ⎠(2.11)ซึ่งสามารถเขียนเปน2u v v v3= [ − 0.5( + )](2.12a)x a b c3uy ( vb vc)3= − (2.12b)รูปที่ 2.18 พิกัดเวคเตอรในระบบสามเฟส และ space vector u () tการแปลงจากแกน x − y ไปเปนแกน α − β ไดโดยทําการหมุนแกน x − y ดังกลาวดวย ω tโดยที่ ω เปนความเร็วเชิงมุม⎛π ⎞ucos( ωt) cos( + ωt)⎛ α ⎞ ⎜2⎟⎛ux⎞ ⎛cos( ωt) −sin( ωt)⎞⎛ux⎞⎜ ⎟= ⎜ ⎟⎜ ⎟=uβπ u⎜ ⎟⎜ ⎟⎝ ⎠ y sin( ωt) cos( ωt)uysin( ωt) sin( ωt)⎝ ⎠⎜+ ⎟⎝ ⎠ ⎝ ⎠⎝2 ⎠(2.13)
27จากสมการ (2.9) เราสามารถแปลงกลับไดเปนu = Re( u )(2.14)aubuc= u− j(2/3)πRe( e )= uj(2/3)πRe( e )ในระบบ 3 เฟสแบบสมดุล แรงดันไฟฟา ua ub uสามารถเขียนไดเปนcu V sin( ωt)a= (2.15)mub= Vmsin( ωt−2 π / 3)u = V sin( ωt+2 π / 3)cmโดยที่ Vmมีคาเปนยอดแรงดันไฟฟาจากสมการ (2.9) เวคเตอร SV สามารถเขียนไดเปนjωt=m=m(2.16)jθut () Ve Veจากสมการขางตน อธิบายถึงเวคเตอรที่มีขนาด Vmหมุนดวยความเร็วคงที่ ωs 1s3s5s4s6s 2รูปที่ 2.19 ชวงเวลาการสวิตชของอินเวอรเตอร
28เวคเตอรปริภูมิ (SV)สเตตการสวิตชของอินเวอรเตอร สามารถแสดงในรูปแบบของคาเลขฐานสองq1, q2, q3, q4,qและ5q6โดยที่ qk= 1 เมื่อสวิตช ปดวงจร และ qk= 0 เมื่อสวิตชเ ปดวงจรqเมื่อคู qq1 4,qq3 6และ qq5 2เปนคูที่มีคาตรงขามกัน ดังนั้น q4 1 q1, q6 1 q3= 1−qโดยสเตตของการเปด/ปด สวิตชแสดงในรูปที่ 2.192 5= − = − และพิจารณาการแปลงจาก 3 เฟสไปเปน 2 เฟส ตามสมการที่ (2.11) และ พิจารณาแรงดันไฟฟาในสาย( 3 แรงดันเฟส) เปนคาอางอิง ทําใหองคประกอบของ α − β ซึ่งเปนเวคเตอรแรงดันไฟฟาแบบ rms (root mean square) สามารถแสดงในรูปแบบฟงกชั่นของ q1, q3,q5V⎛ −1 −1⎞⎜1⎟ ⎛ q ⎞1⎛ Lα⎞ 2 3 2 2 ⎜ ⎟⎜ ⎟=V ⎜⎟sq3VLβ3 2 3 3⎝ ⎠ ⎜ − ⎟0⎜q⎟5⎜ ⎟⎝ ⎠⎝ 2 2 ⎠เมื่อ Vs= แหลงจายแรงดันไฟตรง(2.17)คา 2 ใชในการแปลงคาแรงดันไฟฟาแบบ rms เปนคาแรงดันสูงสุด สําหรับคาสูงสุดของแรงดันสายมีคา 2 Vs/ 3 ในขณะที่คาสูงสุดของแรงดันเฟสมีคา Vp( peak) = Vs/ 3เมื่อพิจารณาใหแรงดันเฟส Vaเปนแรงดันอางอิง เวคเตอรแรงดันในสาย Vabจะนําหนาเฟสเวคเตอรอยู π /6 และคาสูงสุดของแรงดันสายที่ถูกนอรแมลไลซ สามารถแสดงไดตามสมการ2× 2 (2 1) /6 2 ⎡j n− π⎛(2n−1)π ⎞ ⎛( 2n−1)π ⎞⎤V = e = cos + jsin(2.18)n⎢3 3 ⎢⎣⎜⎝⎟ ⎜6 ⎠ ⎝ 6โดยที่ n = 0,1, 2,6 เปนหมายเลขของเวคเตอรแรงดันในสายพิจารณาหกเวคเตอรที่ไมไชเวคเตอรศูนย, V1ถึง V6, และ V0และ V7ที่เปนเวคเตอรศูนย ดังแสดงในรูปที่ 2.20 ทําใหเราสามารถกําหนดเวคเตอร U เปนฟงกชั่นเวลาทางของการอินทิเกรท V ดังแสดงตามสมการn⎟⎥⎠⎥⎦
29∫ n 0U= V dt + U (2.19)โดยที่ U0เปนสภาวะเริ่มตนจากสมการที่ (2.19) กายภาพของฟงกชั่น U แสดงไดเปนรูปทรงเชิงเรขาคณิตหกเหลี่ยมที่คํานวณไดจากขนาด และคาบเวลาของเวคเตอรแรงดันไฟฟา ถาแรงดันไฟฟาเอาทพุทเปนสัญญาณไซนูซอยดที่สมบูรณแบบ ดังนั้นเราสามารถพิจารณาฟงกชั่น U ไดในรูปแบบ* jθjωtU = Me = Me(2.20)โดยที่ M เปนดรรชนีการมอดดูเลต (0 < M < 1) สําหรับการควบคุมขนาดของแรงดันไฟฟาเอาทพุทและ ω เปนความถี่เอาทพุท*กายภาพของฟงกชั่น U แสดงไดเปนรูปทรงเชิงเรขาคณิตวงกลม ดังแสดงในรูปที่ 2.20ตามเสนประวงกลมที่มีรัศมี M = 1 และ ถูกพิจารณาเปนเวคเตอรอางอิง Vrรูปที่ 2.20 แสดงเวคเตอรปริภูมิ
30กายภาพรูปทรงเชิงเรขาคณิตของฟงกชั่น U สามารถควบคุมไดโดยการเลือกเวคเตอร Vn*และการปรับคาความกวางของเวคเตอร Vnใหมีรูปทรงเขาใกลฟงกชั่น U มากที่สุด ซึ่งวิธีการนี้เรียกวา “quasi-circular”การมอดดูเลตเวคเตอรอางอิงจากสมการที่ (2.11) และ (2.12) เวคเตอรของสัญญาณมอดดูเลตแรงดันสาย 3 เฟส[ ] [ ] T*vr abc= vravrbvrcสามารถแสดงโดยเวคเตอรจํานวนเชิงซอนโดยไดดังนี้U = V [ v ] [ v v ] Tr=αβ=α βr r r2vr [ vra 0.5( vrb vcr)]33vr ( vrb vrc)3α = − + (2.21)β = − (2.22)ถาสัญญาณมอดดูเลตแรงดันสาย [ vr]abcเปนสัญญาณไซนูซอยดของระบบ 3 เฟสสมดุล ที่มีขนาด Ac= 1 และω เปนความถี่เชิงมุม โดยพิจารณาในระนาบไมเคลื่อนที่ α − β ที่ไมเคลื่อนที่ สัญญาณมอดดูเลต Vc= [ vr] αβจะมีขนาดคงที่ MAc( = M)และหมุนดวยความถี่ ω ดังแสดงเปนวงกลมจุดไขปลาที่มีรัศมี M ในรูปที่ 2.20การสวิตชชิ่งแบบ SVจุดประสงคของสวิตชชิ่งแบบ SV เปนการสรางสัญญาณมอดดูเลต Vrในสายใหมีความใกลเคียงกับสัญญาณไซนูซอยด Vrซึ่งมี 8 SV ( Vn, n = 0,2,...,7 ) อยางไรก็ตามถาสัญญาณการมอดดูเลต vc ถูกวางใหอยูระหวางเวคเตอร Vnและ Vn+ 1จะสงผลใหเวคเตอรศูนยจํานวนสองเวคเตอร และ SV เวคเตอรที่เปนศูนย ( Vz = V0หรือ V 7) จะถูกใชเพื่อใหใหไดแรงดันในสายสูงสุดที่ตกครอมโหลด พรอมกับทําใหความถี่การสวิตชมีคานอยที่สุดเวคเตอร Vrของสวนที่หนึ่ง (แสดงในรูปที่ 2.20) สามารถพิจารณาไดจากเวคเตอร V1และ V2และ หนึ่งเวคเตอรศูนย ( V0หรือ V 7) ในความหมายอีกนัยหนึ่ง สเตตของ V1แอคทีฟเปนชวงเวลา T1แอคทีฟเปนชวงเวลา ในขณะที่ V2แอคทีฟเปนชวงเวลา T2สําหรับT zเปนชวงเวลาแอคทีฟของเวคเตอรศูนย ( V0หรือ V 7)
เมื่อพิจารณาความถี่การสวิตชที่สูงเพียงพอสําหรับการทํางาน เวคเตอรอางอิง Vrสามารถถูกอนุมานใหมีคาคงที่ตลอดหนึ่งคาบเวลาของการสวิตช และจากสาเหตุที่เวคเตอร V1และ V2มีคาคงที่ และ เวคเตอร Vzมีคาเปนศูนย ทําใหเราสามารถกําหนดใหเวลาของการสวิตชไดตามสมการ31V × T = V × T + V × T + V × T(2.23)r s 1 1 2 2 z zสมการขางตนอธิบายถึงหลักการของ SVM ซึ่งอาศัยเวคเตอร SV จํานวนสองเวคเตอรที่อยูใกลกันที่มีวงรอบเวลาการทํางานที่เหมาะสม โดยกายภาพของวิธี SVM แสดงในรูปที่ 2.21รูปที่ 2.21 การหาคาเวลาสเตตของ SVMเมื่อพิจารณาเวคเตอร SV ในระบบพิกัดเชิง สมการที่ (2.20) สามารถเขียนใหมไดเปน⎛ ⎛π ⎞⎞ ⎛ ⎛π ⎞⎞ ⎛ ⎛π⎞⎞⎜cos⎜ + θ ⎟ cos cos6⎟ ⎜ ⎜ ⎟2 6⎟ ⎜ ⎜ ⎟2 2⎟T ⎜ ⎝ ⎠⎟ ⎝ ⎠ ⎝ ⎠s= T ⎜ ⎟1+ T ⎜ ⎟2+ Tz0⎜ ⎛π ⎞⎟ 3⎜ ⎛π ⎞⎟ 3⎜ ⎛π⎞⎟⎜sin ⎜ + θ ⎟⎟ ⎜sin ⎜ ⎟⎟ ⎜sin⎜ ⎟⎟⎝ ⎝ 6 ⎠⎠ ⎝ ⎝ 6 ⎠⎠ ⎝ ⎝ 2⎠⎠M (2.24)เมื่อพิจารณาสวนจํานวนจริง และจํานวนจินตภาพ ทั้งสองขางของสมการขางตน
32⎛π ⎞ 2 ⎛π ⎞ 2 ⎛π⎞TMscos⎜ + θ ⎟= T1 cos⎜ ⎟+T2cos⎜ ⎟⎝ 6 ⎠ 3 ⎝ 6 ⎠ 3 ⎝ 2⎠⎛π ⎞ 2 ⎛π ⎞ 2 ⎛π⎞TMssin ⎜ + θ ⎟= T1 sin ⎜ ⎟+T2sin ⎜ ⎟⎝ 6 ⎠ 3 ⎝ 6 ⎠ 3 ⎝ 2⎠คาคาบเวลา T1และT 2คํานวณไดจาก⎛π ⎞cos3⎜ + θ ⎟6⎛π ⎞ ⎛π⎞T1= TsM ⎝ ⎠= TsM cos θ TsMsin θ2 π⎜ + ⎟= ⎜ − ⎟⎛ ⎞ 6 3cos⎝ ⎠ ⎝ ⎠⎜ ⎟⎝ 6 ⎠(2.25)( θ )3 sinT2= TsM = TsMsin2 ⎛π⎞ sin ⎜ ⎟⎝ 6 ⎠( θ )(2.26)T T T T T= = − − (2.27)0 z s 1 2โดยที่ M เปนดรรชนีการมอดดูเลตθ เปนมุมระหวาง Vrและ V nT เปนคาบเวลาของการสวิตชรวมST0เปนคาบเวลาของเวคเตอรแรงดัน V,V0 7T1เปนคาบเวลาของเวคเตอรแรงดัน V1T2เปนคาบเวลาของเวคเตอรแรงดัน V2สําหรับสวนที่ 2 ถึง 6 เราสามารถที่จะพิจารณาไดเหมือนกับกรณีสวนที่หนึ่ง เพื่อคํานวณหาเวลาสเตต โดยสมมุติใหอินเวอรเตอรทํางานที่ความถี่คงที่ และ TSยังคงมีคาคงที่ลําดับการสวิตช SVลําดับการสวิตช SV ถูกนํามาพิจารณาเพื่อใหแรงดันไฟฟาในสายมีความสมมาตรและลดผลของฮารมอนิกคู นอกจากนี้ในการที่จะลดคาความถี่ของการสวิตช จําเปนที่ตองทําการจัดเรียงลําดับการสวิตชในทิศทางไปสูลําดับตอไปโดยการสวิตชเพียงหนึ่งกิ่งของชุดขับ ณ.เวลาหนึ่งถึงแมวาการทํางานในลักษณะแบบนี้จะไมใชแนวทางสมมาตรในการสรางลําดับการสวิตช SV
33โดยสถานะของลําดับการสวิตชเปนและ V 7)V , V , Vn+1znVz(โดยที่ Vzเปนตัวเลือกระหวาง V0จากรูปที่ 2.20 พิจารณาเวคเตอรอางอิงในสวนที่หนึ่ง ลําดับของการสวิตชเปน V0, V1, V2, V7, V7, V2, V1, V0ชวงเวลา T ( z= T ) 0= T7สามารถแยกและกระจายที่ไดจุดเริ่มตนและจุดสิ้นสุดของคาบเวลาการสุมTSรูปที่ 2.22 แสดงลําดับการสวิตช และสวนประกอบของแรงดันไฟฟาสามเฟสเอาทพุทในชวงสองคาบเวลาการสุม โดยทั่วไปชวงเวลาของเวคเตอรศูนยจะมีการกระจายที่เทาๆกัน ดวยคาบเวลา Tz/2ทั้งที่จุดเริ่มตนและจุดสิ้นสุดรูปที่ 2.22 รูปแบบของ SVMแรงดันไฟฟาเฟส ณ. เวลาใดเวลาหนึ่งสามารถพิจารณาไดจากคาเวลาเฉลี่ยของ SV ตลอดชวงหนึ่งคาบเวลาการสวิตชสําหรับสวนที่หนึ่ง ดังแสดงไดตามสมการVs⎛−TzTz⎞ Vs⎛π⎞vaN= ⎜ + T1+ T2 + ⎟= sin ⎜ + θ ⎟2T⎝ 2 2 ⎠ 2 ⎝ 3 ⎠s(2.28a)
34V ⎛−T T ⎞ 3 ⎛ π ⎞vbN= − T + T + ⎟= Vssin ⎜θ− ⎟2T2 2 ⎠ 2 ⎝ 6 ⎠s z z⎜1 2s ⎝(2.28b)V ⎛−T T ⎞vcN= −T − T + ⎟=−VT⎠s z z⎜1 2s ⎝ 2 2aN(2.28c)ในการที่จะลดผลของฮารมอนิกที่ไมพึ่งประสงคจากการมอดดูเลตโดยวิธี SVM คาความถี่สุมที่ถูกนอรแมลไลซ fsnจะตองเปนเลขจํานวนเต็มที่คูณดวย 6 โดยที่ T ≥ 6nTSสําหรับn = 0,1, 2,3, … ซึ่งการที่จะทําใหแรงดันเอาทพุทในสายมีความสมมาตร จําเปนที่สวนทั้งหกจะตองถูกใชเทาๆกันในหนึ่งคาบเวลารูปที่ 2.23 แสดงรูปแบบทั่วไปของสัญญาณการมอดดูเลต SV สําหรับ fsn= 18 และ M =0.8(ก) สัญญาณมอดดูเลต(ข) ชวงเวลาการสวิตชของสวิตช S1(ค) ชวงเวลาการสวิตชของสวิตช S3รูปที่ 2.23 รูปสัญญาณ3เฟสของการมอดดูเลต space vector ( M = 0.8, f sn= 18 )
35(ง) สเปคตรัมของแรงดันไฟฟาสลับที่ขาออกของวงจรรูปที่ 2.23(ตอ) รูปสัญญาณ3เฟสของการมอดดูเลต space vector ( M = 0.8, f sn= 18 )การมอดดูเลตเกิน ( overmodulation )ในกรณีของการมอดดูเลตเกิน เวคเตอรอางอิงจะตามแนววิถีวงกลม ซึ่งขยายไปจากขอบเขตเดิมของรูปทรงหกเหลี่ยม โดยที่สวนของวงกลมที่อยูภายในรูปทรงหกเหลี่ยมสามารถที่จะใชสมการ SVM สําหรับการคํานวณหาเวลาสเตตTn,Tn + 1และT zตามสมการ (2.25) ถึง (2.27)อยางไรก็ตามในสวนของวงกลมที่อยูภายนอกรูปทรงหกเหลี่ยมจะถูกจํากัดโดยขอบของรูปทรงหกเหลี่ยมดังแสดงในรูปที่ 2.24 โดยเวลาสเตต Tnและ Tn + 1ที่สอดคลองกับกรณี สามารถคํานวณไดจากTn= Ts3cos3cos( θ ) − sin( θ )( θ ) + sin( θ )(2.29a)2sinT = n+ 1Ts3cos +( θ )( θ ) sin( θ )(2.29b)T T T Tz= − − = (2.29c)s1 20คาดัชนีการมอดดูเลตสูงสุด M สําหรับ SVM มีคา Mmax= 2/ 3 สําหรับกรณี 0< M ≤1อินเวอรเตอรทํางานในโหมด SVM ปกติ และกรณี M ≥ 2/ 3อินเวอรเตอรทํางานในโหมดเอาทพุทหกขั้น โดยการทํางานของโหมดเอาทพุทหกขั้น จะทําการสวิตชอินเวอรเตอรตามตารางที่2.2
36รูปที่ 2.24 การมอดดูเลชั่นเกินดวยวิธีนี้ ทําใหจํานวนการสวิตช ณ.เวลาหนึ่งๆ มีจํานวนลดลง สําหรับกรณี1< M < 2/ 3อินเวอรเตอรจะทํางานในโหมดมอตดูเลตเกิน ซึ่งโดยปกติแลวถูกใชเปนขั้นตอนของการเปลี่ยนแปลงจากเทคนิคของ SVM ไปสูการทํางานในโหมดหกขั้น ถึงแมวาการมอดดูเลตเกินจะยินยอมใหมีการใชแรงดันไฟฟาอินพุทดีซีในปริมาณที่มากกวาเทคนิค SVM แตจะสงผลใหแรงดันไฟฟาเอาทพุทมีลักษณะไมเปนแบบไซนูซอยด โดยเฉพาะที่ความถี่เอาทพุทต่ําๆการเปรียบเทียบเทคนิค PWMเทคนิคการมอดดูเลตถูกนํามาใชในการสรางรูปสัญญาณความถี่หรือรูปสัญญาณแรงดันไฟฟาที่มีการเปลี่ยนแปลงตามเวลา ซึ่งเปนที่ทราบกันดีวาสัญญาณมอดดูเลต PWM ที่ใชในการสวิตชอินเวอรเตอรนั้นถูกสรางมาจากการเปรียบเทียบระหวางสัญญาณพาหรูปคลื่นสามเหลี่ยมความถี่สูงและสัญญาณไซนูซอยดอางอิงสามสัญญาณ ซึ่งหลักการพื้นฐานนี้ไดถูกนํามาพัฒนาสรางทั้งทางแอนาลอกและดิจิตอลสําหรับการแปลงกําลังงานสัญญาณ PWM ไดรับความนิยมในการประยุกตใชงานกับระบบไฟฟาสามเฟส เนื่องจากองคประกอบฮารมอนิกที่สามที่ถูกขจัดออก และ การใชแรงดันไฟฟากระแสตรงในการสรางสัญญาณ PWM ในขณะที่วิธี SV ไมไดพิจารณาแยกสวนในแตละเฟสแรงดันไฟฟาเหมือนกับกรณีของ PWM แตแรงดันไฟฟาทั้งสามเฟสซึ่งถูกพิจารณาภายในระบบอางอิงสองมิติ (ระนาบ α - β )และ เวคเตอรอางอิงจะถูกประมวลผลเปนชุดเดียวกัน นอกจากนี้วิธี SVM ยังมีขอดีในแงฮารมอนิก
ที่ต่ํา และ ดรรชนีการมอดดูเลตที่สูง โดยเฉพาะการพัฒนาในเชิงดิจิตอลที่ใชไมโครโปรเซสเซอรชิฟเดี่ยว จากคุณสมบัติที่ หยืดหยุนในการควบคุม ทําใหวิธี SVM ไดรับความนิยมในการประยุกตใชงานดานการแปลงกําลังงาน และการควบคุมมอเตอรตารางที่ 2.3 แสดงผลรวมของการมอดดูเลตประเภทตางๆสําหรับอินเวอรเตอรสามเฟส ที่ M = 1372.14 FPGA (Field Programmable Gate Array)เอฟพีจีเอ(FPGA) คือวงจรรวมชนิดหนึ่งที่พัฒนา หรือขยายความสามารถใหมากกวาPLA/PLD (Programmable logic array/Programmable logic device) ซึ่งภายในประกอบไปดวยเกตจํานวนมาก และความเร็วที่เพิ่มขึ้น สําหรับการรองรับการใชงานในระบบที่มีความซับซอนมากขึ้นกวา PLA/PLD ตัว FPGA นั้นเปนสวนผสมระหวางฮารดแวรและซอฟทแวร นั่นคือสามารถนํามาใชงานเปนฮารดแวรที่สามารถโปรแกรมได (Programmable) หรือเปลี่ยนลักษณะของการทํางานได (Reconfigurable) เหมือนซอฟทแวร ทําใหมีความยืดหยุนในการใชงานสูง ทําให FPGAเริ่มเปนที่นิยมมากขึ้นในปจจุบัน นอกจากความงายใชการออกแบบแลว ยังสามารถกําจัดความเสี่ยงในการออกแบบ เพราะสามารถนํามาโปรแกรมใหมไดตลอดเวลา ตางจากวงจรที่เปนฮารดแวรซึ่งไมสามารถแกไขวงจรที่ออกแบบไดอีก โดย FPGA ในปจจุบันมีความจุเกตเพิ่มขึ้นมากกวาชวงเริ่มแรกที่มีเกตไมกี่รอยตัว ซึ่งปจจุบันสามารถทําไดหลายลานตัวในชิฟ FPGA เพียงตัว ทําใหสามารถทําการโปรแกรมไดวงจรที่ซับซอน และใหญขึ้นซึ่งคุณสมบัติของ FPGA สวนใหญแลวภายในจะประกอบไปดวย ลอจิกเซลลที่สามารถโปรแกรมได หนวยความจํา RAM , DSP block มีพอรต I/O เปนจํานวนมาก และยังสามารถสงขอมูลแบบอนุกรมที่ความสูงมากกวา 600Mb/s (Multi-gigabit transceiver) เมื่อนําไปเปรียบเทียบกับไมโครคอนโทรลเลอรเชน MSC-51 หรือ ตระกูล PIC แลว FPGA มีขอไดเปรียบมากกวาตรงที่สามารถนําเอาวงจรที่ออกแบบทั้งหมด นํามาโปรแกรมไวใน FPGA ไดโดยไมตองตอลอจิกเกตภายนอกเพิ่มเติม ทั้งยังสามารถจําลองไมโครคอนโทรลเลอรไวภายในตัวดวย อีกทั้งยัง
38รูปที่ 2.25 แสดงโครงสรางภายใน FPGAมีความเร็วของสัญญาณนาฬิกาที่สูงกวามาก เชน FPGA เบอร XC2S100 ที่ใชมีสัญญาณนาฬิกา 160MHzสวน MCS-51 และ PIC16F72 จะมีสัญญาณนาฬิกา 20MHz สวนขอดอยกวาของ FPGAคือราคาเมื่อเทียบกับ ไมโครคอนโทรลเลอรแลวยังแพงกวา แตเมื่อเทียบกับระบบรวมแลวที่ไมตองตอลอจิกเกต ภายนอก ไมตองทําแผนวงจรพิมพ PCB ในสวนของภาคดิจิตอลที่ออกแบบเพิ่ม จะทําใหราคาของระบบมีราคาใกลเคียง หรือถูกกวารูปที่ 2.26 แสดงขั้นตอนออกแบบบน FPGA
39สวนในการออกแบบวงจรดิจิตอลดวย FPGA นั้นตางจากไมโครคอนโทรลเลอรในลักษณะเปนการออกแบบฮารดแวร หรือวงจรดิจิตอล แทนที่จะเปนซอฟทแวร หรือตัวโปรแกรมโดยตรงซึ่งทั่วไปมีองคประกอบ 4 สวนหลักๆดวยกันคือDesign Entry เปนขั้นตอนของการรับขอมูลของการออกแบบเขาไปในระบบ โดยทั่วไปสามารถทําไดหลายทาง เชนโดยใช Schematic design entry ดึงอุปกรณมาจากไลบารีของ FPGAหรือโดยใชภาษา HDL อยางเชน VHDL หรือ Verilog ซึ่งออกแบบโดยใชภาษาชั้นสูงนั้นมีของดีกวาคือ ไมขึ้นกับเทคโนโลยี หรือตัวชิฟที่จะถูกโปรแกรม ดังนั้นผูออกแบบไมจําเปนตองรูถึงลักษณะการเชื่อมตอของวงจร ตัวอยางเชนการสรางตัวบวก(adder)ที่ทําการบวกขอมูล a กับb เขาดวยกัน ก็เพียงแคเพิ่มบรรทัด z = a+b; เขาไปเทานั้น สวนการทดสอบความถูกตองเปนในลักษณะการตรวจสอบระดับฟงกชั่นการทํางาน (Function simulation) โดยใชซอฟตแวรสําหรับจําลองการทํางาน ซึ่งจะไมมีขอมูลเกี่ยวกับดีเลยใหเห็นSynthesis ขั้นตอนนี้จะเกี่ยวของกับการแปลงแบบที่ไดออกแบบจาก Schematic หรือ HDLใหเปนวงจรลอจิก โดยจะมีขั้นตอนยอยๆคือการสังเคราะหวงจร (Logic synthesis) ซึ่งโดยปกติแลวจะมีขั้นตอนการ optimization ดวยเพื่อใหไดวงจรที่ใชทรัพยากรนอยที่สุด หรือทํางานไดเร็วที่สุดผลลัพธจากขั้นตอนนี้จะเปน EDIF (Electronic design intermediate form) ซึ่งเปนไฟลที่อธิบายการเชื่อมตอ (Netlist) และยังไมขึ้นกับเทคโนโลยี นั่นหมายถึงวาเปนมาตราฐานที่ตัวเครื่องมือในการออกแบบ (Design tools) สวนมากจะสามารถเขาใจไฟลชนิดนี้ได การจําลองการทํางานในขั้นตอนนี้จะเปนลักษณะของ Post-synthesis simulation ซึ่งจะไมมีขอมูลเกี่ยวกับดีเลยใหเห็นเชนกัน แตผลการจําลองจะไดมาจาก EDIF ไฟลImplementation หลังจากได Netlist file มาแลวจะเปนการแมป(MAP) ใหเขากับเทคโนโลยี หรือตัวชิฟที่จะใชงาน(Technology mapping) เชนโดยสวนมากแลว FPGA จะเปนเทคโนโลยีแบบ LUT (Look-up table) และหลังจากนั้นก็จะทําการวางตําแหนง (Placement) ของลอจิกตางๆ แลวทําการเชื่อมตอสายสัญญาณ (Routing)กอนที่จะไดไฟลสําหรับโปรแกรมลงชิป(Reconfiguration file) การจําลองการทํางานในระดับนี้จะสามารถดูดีเลยตามจุดตางๆไดหลังจากมีการสรางขึ้นจริงๆตามเทคโนโลยี หรือตัวชิฟที่จะใชงานHardware Program การโปรแกรมอุปกรณหรือชิฟ FPGA นั้นเราสามารถทําเองได ไดทันที รวมทั้งการปรับเปลี่ยนแกไขไดตลอดเวลา โดยกลับไปทําตั้งแตตน กอนที่จะทําการโปรแกรม
ทดสอบการทํางานจริงๆไดโดย ไมมีคาใชจาย หรือความเสียหายเกิดขึ้น ซึ่งเหมือนกับไมโครคอนโทรลเลอรนั่นเอง ดังนั้นชิฟ FPGA จึงอาจถูกเรียกวาฮารดแวรที่สามารถโปรแกรมได(Reprogrammable hardware)ความสามารถของ FPGA นั้นสูงกวาไมโครคอนโทรลเลอรมาตามที่กลาวมาแลว โดยตัวชิฟ FPGA ทํางานที่ความถี่ 300MHz นั้นเร็วกวา 1GHz 32bit processor (ที่ตองทําการประมวลผลโปรแกรมทีละบรรทัด) หลายเทาตัว เนื่องจากการทํางานบน FPGA นั้นเปนลักษณะของฮารดแวรที่สามารถทํางานไดพรอมๆกันเปนแบบขนาน สวนราคาจะสูงตามประสิทธิภาพ40