Elektrotechnika 1 - UTEE
Elektrotechnika 1 - UTEE
Elektrotechnika 1 - UTEE

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Elektrotechnika</strong> 1 35<br />
Při odvození vztahu pro energii akumulovanou v magnetickém poli induktoru opět<br />
vycházíme z integrálu okamžitého výkonu, při využití vztahu ( 2.21 ). Dostáváme<br />
t<br />
1 2<br />
Wm ( t)<br />
= ∫u(<br />
τ ) i(<br />
τ ) dτ<br />
= L ∫i(<br />
τ ) di(<br />
τ ) = Li ( t)<br />
. ( 2.23 )<br />
2<br />
0<br />
i(<br />
t )<br />
0<br />
Ze vztahu vyplývá, že stavovými (tedy i spojitými) veličinami jsou spřažený magnetický<br />
tok a proud induktorem, zatímco napětí na induktoru může být obecně funkcí nespojitou.<br />
Z podobnosti (tzv. duality, viz kap. 3.7.5) rovnic pro kapacitor a induktor vyplývá, že i<br />
cívka se podobně jako kondenzátor dá použít pro integraci nebo derivování signálu. Praktické<br />
důvody však vedou k tomu, že se pro tyto účely daleko častěji používá kondenzátorů.<br />
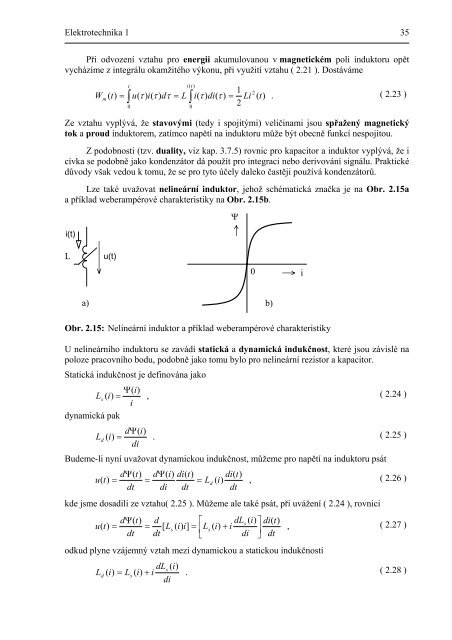
Lze také uvažovat nelineární induktor, jehož schématická značka je na Obr. 2.15a<br />
a příklad weberampérové charakteristiky na Obr. 2.15b.<br />
i(t)<br />
Ψ<br />
L<br />
u(t)<br />
0<br />
i<br />
a)<br />
b)<br />
Obr. 2.15: Nelineární induktor a příklad weberampérové charakteristiky<br />
U nelineárního induktoru se zavádí statická a dynamická indukčnost, které jsou závislé na<br />
poloze pracovního bodu, podobně jako tomu bylo pro nelineární rezistor a kapacitor.<br />
Statická indukčnost je definována jako<br />
Ψ(<br />
i)<br />
L s<br />
( i)<br />
= , ( 2.24 )<br />
i<br />
dynamická pak<br />
dΨ(<br />
i)<br />
L d<br />
( i)<br />
= . ( 2.25 )<br />
di<br />
Budeme-li nyní uvažovat dynamickou indukčnost, můžeme pro napětí na induktoru psát<br />
dΨ(<br />
t)<br />
dΨ(<br />
i)<br />
di(<br />
t)<br />
di(<br />
t)<br />
u( t)<br />
= =<br />
= Ld<br />
( i)<br />
, ( 2.26 )<br />
dt di dt dt<br />
kde jsme dosadili ze vztahu( 2.25 ). Můžeme ale také psát, při uvážení ( 2.24 ), rovnici<br />
dΨ(<br />
t)<br />
d ⎡ dLs<br />
( i)<br />
⎤ di(<br />
t)<br />
u( t)<br />
= = [ Ls<br />
( i)<br />
i]<br />
= Ls<br />
( i)<br />
i<br />
dt dt<br />
⎢ +<br />
di<br />
⎥ , ( 2.27 )<br />
⎣<br />
⎦ dt<br />
odkud plyne vzájemný vztah mezi dynamickou a statickou indukčností<br />
dLs<br />
( i)<br />
Ld<br />
( i)<br />
= Ls<br />
( i)<br />
+ i . ( 2.28 )<br />
di