1. ELEKTERVEO NÃÃDISTASE JA ARENGUD
1. ELEKTERVEO NÃÃDISTASE JA ARENGUD
1. ELEKTERVEO NÃÃDISTASE JA ARENGUD

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
suudavad tõhusalt talitleda ka piduritalitluses. Elektersõidukites eelistatakse veotelgede ja rataste<br />
eraldi juhtimist, mis võimaldab paremat veojõu juhtimist libisemise korral. Madalapõrandalistel<br />
sõidukitel on sageli kasutusel eraldi mootoritega veetavad rattad [CHE02].<br />
Jõuülekanne<br />
Elektriajami üheks komponendiks on ülekanne. Sõltuvalt rööbassõiduki liigist, kiirusest, põranda<br />
kõrgusest, rööbaste vahest ja paljudest muudest alusvankritega seotud tehnilistest iseärasustest, nagu<br />
liigendid jt. kasutatakse erinevaid jõuülekandeid [OKA98]. Kasutatakse rattarummu sisese<br />
veoülekandega ajameid ja kardaanülekandega ajameid. Täis-madalapõrandalistel alusvankritel ei saa<br />
kasutada läbivaid veotelgi, mistõttu sõiduki parem- ja vasakpoolseid rattaid veetakse eraldi<br />
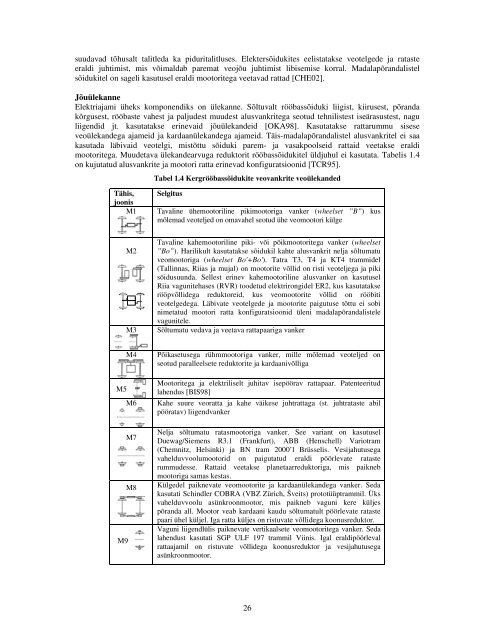
mootoritega. Muudetava ülekandearvuga reduktorit rööbassõidukitel üldjuhul ei kasutata. Tabelis <strong>1.</strong>4<br />
on kujutatud alusvankrite ja mootori ratta erinevad konfiguratsioonid [TCR95].<br />
Tabel <strong>1.</strong>4 Kergrööbassõidukite veovankrite veoülekanded<br />
Tähis,<br />
joonis<br />
M1<br />
Selgitus<br />
Tavaline ühemootoriline pikimootoriga vanker (wheelset ”B”) kus<br />
mõlemad veoteljed on omavahel seotud ühe veomootori külge<br />
M2<br />
M3<br />
Tavaline kahemootoriline piki- või põikmootoritega vanker (wheelset<br />
”Bo”). Harilikult kasutatakse sõidukil kahte alusvankrit nelja sõltumatu<br />
veomootoriga (wheelset Bo'+Bo'). Tatra T3, T4 ja KT4 trammidel<br />
(Tallinnas, Riias ja mujal) on mootorite võllid on risti veoteljega ja piki<br />
sõidusuunda. Sellest erinev kahemootoriline alusvanker on kasutusel<br />
Riia vagunitehases (RVR) toodetud elektrirongidel ER2, kus kasutatakse<br />
rööpvõllidega reduktoreid, kus veomootorite võllid on rööbiti<br />
veotelgedega. Läbivate veotelgede ja mootorite paigutuse tõttu ei sobi<br />
nimetatud mootori ratta konfiguratsioonid üleni madalapõrandalistele<br />
vagunitele.<br />
Sõltumatu vedava ja veetava rattapaariga vanker<br />
M4<br />
M5<br />
M6<br />
M7<br />
M8<br />
M9<br />
Põikasetusega rühmmootoriga vanker, mille mõlemad veoteljed on<br />
seotud paralleelsete reduktorite ja kardaanivõlliga<br />
Mootoritega ja elektriliselt juhitav isepöörav rattapaar. Patenteeritud<br />
lahendus [BIS98]<br />
Kahe suure veoratta ja kahe väikese juhtrattaga (st. juhtrataste abil<br />
pööratav) liigendvanker<br />
Nelja sõltumatu ratasmootoriga vanker. See variant on kasutusel<br />
Duewag/Siemens R3.1 (Frankfurt), ABB (Henschell) Variotram<br />
(Chemnitz, Helsinki) ja BN tram 2000’l Brüsselis. Vesijahutusega<br />
vahelduvvoolumootorid on paigutatud eraldi pöörlevate rataste<br />
rummudesse. Rattaid veetakse planetaarreduktoriga, mis paikneb<br />
mootoriga samas kestas.<br />
Külgedel paiknevate veomootorite ja kardaanülekandega vanker. Seda<br />
kasutati Schindler COBRA (VBZ Zürich, Šveits) prototüüptrammil. Üks<br />
vahelduvvoolu asünkroonmootor, mis paikneb vaguni kere küljes<br />
põranda all. Mootor veab kardaani kaudu sõltumatult pöörlevate rataste<br />
paari ühel küljel. Iga ratta küljes on ristuvate võllidega koonusreduktor.<br />
Vaguni liigendlülis paiknevate vertikaalsete veomootoritega vanker. Seda<br />
lahendust kasutati SGP ULF 197 trammil Viinis. Igal eraldipöörleval<br />
rattaajamil on ristuvate võllidega koonusreduktor ja vesijahutusega<br />
asünkroonmootor.<br />
26