1. ELEKTERVEO NÃÃDISTASE JA ARENGUD
1. ELEKTERVEO NÃÃDISTASE JA ARENGUD
1. ELEKTERVEO NÃÃDISTASE JA ARENGUD

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
kliimaseadmete juhtimist vastavalt jooksvatele sõidutingimustele;<br />
vastavalt välisvalguse intensiivsusele.<br />
reguleerib valgustuse heledust<br />
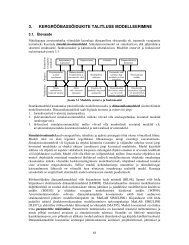
Sõiduki alamsüsteemide ja pardaseadmete talitluste juhtimine toimub sõiduki juhtsiini kaudu. Juhtsiini<br />
kaudu kogutakse infot alamsüsteemides paiknevatest anduritest ja edastatakse alamsüsteemidel<br />
juhttoimed. Levinuimaks siinisüsteemiks sõidukites on mitme ülemseadmega CAN siin.<br />
Autonoomsetes sõidukites on energiahaldussüsteemi võimalik siduda navigatsioonisüsteemiga, see<br />
võimaldab valida väiksema energiakuluga marsruute, paigutada laadimisseadmeid pikematele<br />
marsruutidele. Samuti võimaldab see muuta soovitavaid marsruute (route predictions) ja hinnata<br />
võimalikku sõiduulatust (range prediction) reaalajas vastavalt liiklusoludele. Sõidukiiruse ja tarbitava<br />
võimsuse piiramist saab kasutada energiakulu vähendamiseks.<br />
<strong>1.</strong>5.3. Energiahaldus kontaktliiniga seotud sõidukitel<br />
Energiahalduse meetodid on rakendatavad ka kergetel rööbassõidukitel ja trammidel. Kirjandusest<br />
võib leida uurimistööde ülevaateid energiaefektiivsete tehnoloogiate rakendamise kohta raudteedel<br />
[NOL03]. Energiahaldussüsteem koos energiasalvestite [GAY02] nagu näiteks hoorataste (nt. firma<br />
Beacon Power salvestusalajaam) ja ülikondensaatorite nt. firma Siemens salvestusalajaama<br />
SITRAS SES [SIE05] kasutamisega on võimalik süsteemi kasutegurit tervikuna suurendada [RUF03].<br />
Energiasalvesteid koos teenindavate muunduritega saab paigutada nii alajaamadesse kui ka<br />
sõidukitesse nt. firma Bombardier trammiajamilahendus [STE04] ja firma Vossloh Kiepe GmbH<br />
trammi ja bussi hübriidajamilahendus [LOH04]. Hooratas salvestit saab paigutada ka rööbassõiduki<br />
alusvankrile [PAR03]. Samuti võib kirjandusest leida energiasalvestiga alalisvoolu rööbassõidukite<br />
võimalikke põhimõttelisi tehnilisi lahendusi [TAK03]. Kontaktvõrgust toidetavate elektersõidukite<br />
(trammide, rongide või trollibusside) energiavahetuse juhtimissüsteemi kohta on TTÜ esitanud<br />
patenditaotluse [PET0424]. Mitme, kontaktliini samas sektsioonis paikneva sõiduki vahel on vajalik<br />
energiavoogude reaalajas juhtimist võimaldavate (traadita-) andesidekanalite olemasolu.<br />
<strong>1.</strong>6. Hõõrde juhtimine kergrööbassõidukitel<br />
Veojõud ja pidurdusjõud sõltuvad ratta ja rööpa vahelisest hõõrdest. Veojõu või pidurdusjõu<br />
rakendamisel tekib alati mõningane libistus ratta ja rööpa vahel. Väga suurte jõudude tõttu ratta ja<br />
rööpa kokkupuutepunktis on võimalik saavutada suurt hõõrdejõudu. Samas, isegi molekulaarses<br />
koguses lisandid vähendavad hõõrdumist märkimisväärselt. Need mõjurid on väga juhuslikud ning<br />
neid pole võimalik täpselt modelleerida. Iga süsteem peab aga suutma töötada neist mõjuritest<br />
sõltumata. Põhilisteks lisanditeks, mis hõõrdetegurit mõjutavad on vesi, jää, õli, rauapuru, liiv jms.<br />
Nüüdisaegsete veoajamite juhtimissüsteemid korrigeerivad sõidukijuhi poolt etteantavat signaali ja<br />
võimaldavad reaalajas leida parima hõõrdumise ja seega ka parima kiirenduse või pidurduse.<br />
<strong>1.</strong>6.<strong>1.</strong> Libisemise tuvastamine<br />
Enamikus ajamisüsteemides kasutatakse täpsema tulemuse saamiseks kiiruseandureid. Eraldi<br />
juhitavate mootoritega vahelduvvooluajamites on võimalik pöörlemiskiirust määrata ka mootori<br />
vektormudelite abil. Kiiruse erinevuse meetod [YAS97] kasutab tagasisideks libisemisekiirust v s :<br />
vs<br />
= ωr<br />
⋅ r − vref<br />
,<br />
(<strong>1.</strong>1)<br />
kus: ω r – veotelje või veoratta nurkkiirus, r – veoratta raadius, v ref – sõiduki etteandekiirus, mis<br />
leitakse rataste nurkkiiruste minimaalväärtuste järgi. Mida rohkem rattaid on kasutusel<br />
miinimumkiiruse määramisel, seda parema täpsusega on leitav etteandekiirus. Üldjuhul on sõidukitel<br />
kasutusel ka teisi meetodeid [GUS95], milleks on kiiruste erinevused vedavate ja mittevedavate rataste<br />
vahel, sõiduki dünaamika analüsaator, teepinna peegelduste jälgimine sõiduki ees paiknevate optiliste<br />
anduritega, ratta heli analüüs akustiliste anduritega ja rattasiseste mehaaniliste pingete mõõtmine<br />
anduritega. Eraldi toitemuunduritest juhitavate vahelduvvooluajamite puhul saab rakendada<br />
veorataste kiiruste määramist mootorite voolude järgi [WAT02]. Sõltumatu ergutusega ja eraldi<br />
juhitavate mootorirühmadega alalisvooluajamis saab rakendada libisemise tuvastamist mootorite<br />
elektromotoorjõudude abil.<br />
32