1. ELEKTERVEO NÃÃDISTASE JA ARENGUD
1. ELEKTERVEO NÃÃDISTASE JA ARENGUD
1. ELEKTERVEO NÃÃDISTASE JA ARENGUD

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
R 2<br />
Us Rv R 1<br />
M 2 M 1<br />
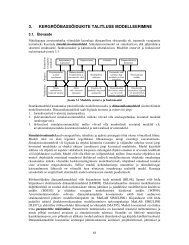
Joonis <strong>1.</strong>14. Alalisvoolu veomootorite libisemisrelee lülitus<br />
Toodud sildlülituses saab andurina kasutada isoleeritud pingeandurit, kõrge mähisepingega<br />
pingereleed U s või optroniga pooljuhtreleed. Andur või relee annab signaali kui veomootorite<br />
vastuelektromotoorjõud pole võrdsed. Paralleellülituses metall-oksiid varistor R v suurendab viivitust ja<br />
vähendab impulssmuunduri ja veomootorite kommutaatorite poolt põhjustatavate kõrgsagedushäirete<br />
mõju. Kirjandusest võib leida jadalülituses alalisvoolu veomootoritega ajamisüsteemi koormuste<br />
jagunemise uuringuid [BOU03].<br />
<strong>1.</strong>6.4. ABS pidurite juhtimine<br />
Rööbassõidukite veojõukontrolli ja libisemisevastaste süsteemide ülesandeks on parandada pidurduse<br />
stabiilsust ja seega vähendada pidurdusteekonna pikkust. Libisemisvastased süsteemid aitavad<br />
vähendada veorataste kulumist ning ühtlustada eri alusvankrite ja erinevate pidurisüsteemide<br />
koormust. Ajamist mõõdetud libisemissignaali kasutatakse lisaks ka kasutajaliideses, et teavitada<br />
sõidukijuhti hõõrdetingimustest ning mitmemootorilise ajamisüsteemi talitluse diagnostikaks.<br />
Libisemissignaali saab kasutada lisaks mootorite elektrilise pidurduse juhtimisele ka<br />
elektromagnetiliste rööpapidurite ja liivaseadmete automaatjuhtimiseks. Rööbassõidukite<br />
libisemisevastased süsteemid erinevad maanteesõidukitel vastavatest süsteemidest, mille peamiseks<br />
ülesandeks on juhitavuse tagamine.<br />
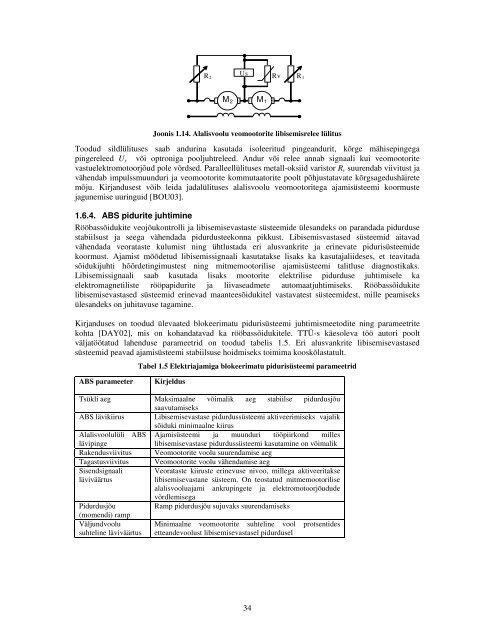
Kirjanduses on toodud ülevaated blokeerimatu pidurisüsteemi juhtimismeetodite ning parameetrite<br />
kohta [DAY02], mis on kohandatavad ka rööbassõidukitele. TTÜ-s käesoleva töö autori poolt<br />
väljatöötatud lahenduse parameetrid on toodud tabelis <strong>1.</strong>5. Eri alusvankrite libisemisevastased<br />
süsteemid peavad ajamisüsteemi stabiilsuse hoidmiseks toimima kooskõlastatult.<br />
Tabel <strong>1.</strong>5 Elektriajamiga blokeerimatu pidurisüsteemi parameetrid<br />
ABS parameeter<br />
Kirjeldus<br />
Tsükli aeg Maksimaalne võimalik aeg stabiilse pidurdusjõu<br />
saavutamiseks<br />
ABS lävikiirus Libisemisevastase pidurdussüsteemi aktiveerimiseks vajalik<br />
sõiduki minimaalne kiirus<br />
Alalisvoolulüli ABS Ajamisüsteemi ja muunduri tööpiirkond milles<br />
lävipinge<br />
libisemisevastase pidurdussüsteemi kasutamine on võimalik<br />
Rakendusviivitus Veomootorite voolu suurendamise aeg<br />
Tagastusviivitus Veomootorite voolu vähendamise aeg<br />
Sisendsignaali<br />
läviväärtus<br />
Veorataste kiiruste erinevuse nivoo, millega aktiveeritakse<br />
libisemisevastane süsteem. On teostatud mitmemootorilise<br />
alalisvooluajami ankrupingete ja elektromotoorjõudude<br />
võrdlemisega<br />
Pidurdusjõu<br />
Ramp pidurdusjõu sujuvaks suurendamiseks<br />
(momendi) ramp<br />
Väljundvoolu<br />
suhteline läviväärtus<br />
Minimaalne veomootorite suhteline vool protsentides<br />
etteandevoolust libisemisevastasel pidurdusel<br />
34