

Den Svævende Kugle, Dokumentation [pdf - sorenr.dk
Den Svævende Kugle, Dokumentation [pdf - sorenr.dk
Den Svævende Kugle, Dokumentation [pdf - sorenr.dk

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Ingeniørhøjskolen ˚Arhus 2005<br />
Gruppe 3<br />
<strong>Den</strong> svævende kugle<br />
2.4 Regulering<br />
Konstanterne a og b ændres hver gang der vælges et nyt arbejdspunkt, hvilket i praksis vil betyde at<br />
overføringsfunktionen ændres hver gang afstanden mellem kuglen og spolen ændres. Det betyder at kompensationskredsløbet<br />
kun vil være ideelt i arbejdspunktet og at et af de væsentligste problemer er at finde<br />
et kompensationskredsløb, der er effektivt i omr˚adet hvori lineariseringen gælder.<br />
2.4.6 Overføringsfunktion mellem strøm og afstand<br />
Laplacetransformeres ¨x(x, i), som er den 2. afledede af positionen, kan kuglens acceleration omskrives og<br />
overføringsfunktionen udledes. Funktionen generaliseres ved at lade ∆x = x og ∆i = i.<br />
L {¨x} = L {x·a + i·b}<br />
⇔ s 2 X(s) = aX(s) + bI(s)<br />
⇒ X(s)<br />
I(s)<br />
= b<br />
s 2 + a<br />
Under beregningen af faktorerne a og b ses det at a er negativ. For overføringsfunktionen betyder det, at<br />
der findes en negativ og en positiv pol. <strong>Den</strong> positive pol gør, at systemet vil være notorisk ustabilt. Dette<br />
identificerer problemet i systemet, som et korrektionskredsløb skal afhjælpe.<br />
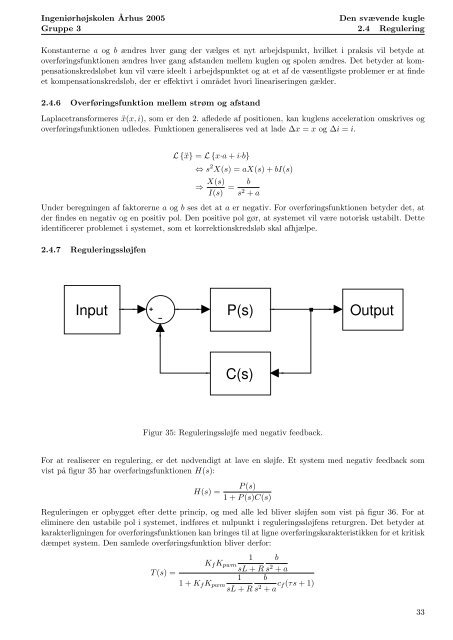
2.4.7 Reguleringssløjfen<br />
Input<br />
P(s)<br />
C(s)<br />
Figur 35: Reguleringssløjfe med negativ feedback.<br />
Output<br />
For at realiserer en regulering, er det nødvendigt at lave en sløjfe. Et system med negativ feedback som<br />
vist p˚a figur 35 har overføringsfunktionen H(s):<br />
H(s) =<br />
P (s)<br />
1 + P (s)C(s)<br />
Reguleringen er opbygget efter dette princip, og med alle led bliver sløjfen som vist p˚a figur 36. For at<br />
eliminere den ustabile pol i systemet, indføres et nulpunkt i reguleringssløjfens returgren. Det betyder at<br />
karakterligningen for overføringsfunktionen kan bringes til at ligne overføringskarakteristikken for et kritisk<br />
dæmpet system. <strong>Den</strong> samlede overføringsfunktion bliver derfor:<br />
T (s) =<br />
Kf Kpwm<br />
1 + Kf Kpwm<br />
1 b<br />
sL + R s2 + a<br />
1 b<br />
sL + R s2 + a cf (τs + 1)<br />
33
![Formelsamling B-niveau projekt [pdf] - sorenr.dk](https://img.yumpu.com/18276273/1/184x260/formelsamling-b-niveau-projekt-pdf-sorenrdk.jpg?quality=85)
![1. Semester EIT: SDS, Dokumentation [pdf] - sorenr.dk](https://img.yumpu.com/18121803/1/184x260/1-semester-eit-sds-dokumentation-pdf-sorenrdk.jpg?quality=85)