

Den Svævende Kugle, Dokumentation [pdf - sorenr.dk
Den Svævende Kugle, Dokumentation [pdf - sorenr.dk
Den Svævende Kugle, Dokumentation [pdf - sorenr.dk

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Den</strong> svævende kugle<br />
3.4 Regulering<br />
3.4 Regulering<br />
Ingeniørhøjskolen ˚Arhus 2005<br />
Gruppe 3<br />
Problemidentifikationen i afsnittet vedr. design af reguleringen giver, at der skal indføres et differentiationsled<br />
i reguleringsløjfens returgren. Desuden skal der indføres en negativ forstærkning i fremløbsgrenen. For<br />
at kompensere for den statiske fejl indføres ogs˚a et integratorled.<br />
Disse to kredsløb er bygget sammen med komparatoren i et særskilt modul kaldet Regulering i OrCADdiagrammerne.<br />
Et ene nulpunkt trives bedst i teorien. Da forstærkningen vokser mod uendeligt med frekvensen, vil<br />
højfrekvent støj forstærkes kraftigt. Derfor indføres der som nævnt en pol, βs+1, der placeres over nulpunktet.<br />
Polen placeres 60 gange højere end nulpunktet. I MathCAD-dokumentet, hvorp˚a alle beregningerne<br />
beror, er denne skaleringsfaktor benævnt βfaktor.<br />
3.4.1 Overføringsfunktion<br />
I MathCAD beregnes værdierne for forstærkning og korrektion automatisk n˚ar systemets parametre er<br />
givet. Som det ses vil DC ikke forstærkes, men g˚a lige igennem, hvilket betyder at der ikke vil være<br />
DC-fejl i returgrenen der skal korrigeres. I praksis vil denne overføringsfunktion ikke kunne lade sig<br />
gøre, da operationsforstærkeren hurtigt vil g˚a i mætning. Der henvises til modultesten hvor den reelle<br />
overføringskarakteristik kan ses. Værdierne τ og β er hentet fra før omtalte MathCAD dokument, beregnet<br />
5<br />
4<br />
3<br />
2<br />
i x0 = 0, 035.<br />
R4<br />
3.4.2 Realisering af korrektionskredsløb<br />
D<br />
C<br />
B<br />
A<br />
Føler<br />
τs + 1<br />
T (s) =<br />
βs + 1<br />
τ = 2.795 · 10 −2<br />
R3 47k5<br />
1<br />
2<br />
R1<br />
47k5 R2<br />
β = 2.795 · 10 −3<br />
Brugerpanel<br />
Føler<br />
0<br />
C2<br />
220n<br />
R10<br />
4k5<br />
5<br />
13<br />
2 +<br />
1 -<br />
4<br />
R9<br />
263k<br />
47k5<br />
0<br />
U3A<br />
12<br />
13 4<br />
-<br />
+<br />
LM747C<br />
47k5<br />
U1A<br />
12<br />
LM747C<br />
Subtraktion 1<br />
6 +<br />
7 -<br />
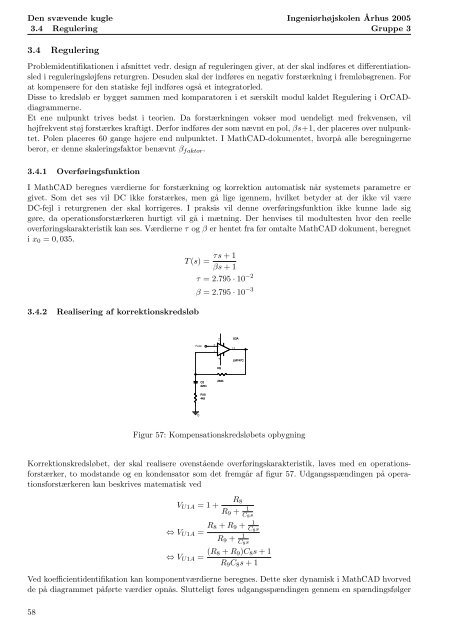
Kompensationskredsløb<br />
(Differentiationsled)<br />
4<br />
9<br />
4<br />
U3B<br />
10<br />
LM747C<br />
Figur 57: Kompensationskredsløbets opbygning<br />
R6<br />
20k<br />
Integratorled og regulering<br />
0<br />
3<br />
0<br />
R11<br />
47k5<br />
R12 47k5<br />
C1<br />
10u<br />
R13<br />
47k5<br />
13<br />
2 +<br />
1 -<br />
4<br />
R14<br />
47k5<br />
Subtraktion 2 Proportionalled<br />
Title<br />
U2A<br />
12<br />
LM747C<br />
R7<br />
47k5<br />
Reguleringsmodul<br />
Size Document Number<br />
A 1<br />
R15<br />
20k<br />
Date: Monday, June 13, 2005<br />
Sheet 1 o<br />
2<br />
1<br />
Korrektionskredsløbet, der skal realisere ovenst˚aende overføringskarakteristik, laves med en operationsforstærker,<br />
to modstande og en kondensator som det fremg˚ar af figur 57. Udgangsspændingen p˚a operationsforstærkeren<br />
kan beskrives matematisk ved<br />
R8<br />
VU1A = 1 +<br />
R9 + 1<br />
C8s<br />
⇔ VU1A = R8 + R9 + 1<br />
C8s<br />
R9 + 1<br />
C8s<br />
⇔ VU1A = (R8 + R9)C8s + 1<br />
R9C8s + 1<br />
Ved koefficientidentifikation kan komponentværdierne beregnes. Dette sker dynamisk i MathCAD hvorved<br />
de p˚a diagrammet p˚aførte værdier opn˚as. Slutteligt føres udgangsspændingen gennem en spændingsfølger<br />
58<br />
R5<br />
5k<br />
7<br />
6<br />
9 4<br />
-<br />
+<br />
LM747C<br />
10<br />
U1B<br />
0<br />
2<br />
3<br />
47k5<br />
R<br />
7 4<br />
-<br />
+<br />
R16<br />
10k<br />
0<br />
7<br />
6<br />
9 4<br />
-<br />
+<br />
6<br />
LM741<br />
U4<br />
1<br />
R17<br />
10<br />
U2B<br />
50k<br />
LM747C
![Formelsamling B-niveau projekt [pdf] - sorenr.dk](https://img.yumpu.com/18276273/1/184x260/formelsamling-b-niveau-projekt-pdf-sorenrdk.jpg?quality=85)
![1. Semester EIT: SDS, Dokumentation [pdf] - sorenr.dk](https://img.yumpu.com/18121803/1/184x260/1-semester-eit-sds-dokumentation-pdf-sorenrdk.jpg?quality=85)