landinspektøren - Ida
landinspektøren - Ida
landinspektøren - Ida

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
28<br />
| MOBIL KORTLÆGNING – INTEGRATION AF LINIELASERSKANNER PÅ DYROS |<br />
kunne opnås tilstrækkeligt gode nøjagtigheder<br />
ved målinger med laserskanneren,<br />
samtidig med at opmålingen<br />
foregik fra en bil i bevægelse.<br />
SICK havde i forbindelse med projektet<br />
været venlige at stille en linielaserskanner<br />
(2D skanner) til rådighed.<br />
Det var modellen LMS 211 Outdoor.<br />
Vejdirektoratet havde også stillet deres<br />
DyRoS bil til rådighed,og det var således<br />
denne bil, der udgjorde platformen<br />
for det MKS, vi integrerede SICK laserskanneren<br />
med. Laserskanneren<br />
og DyRoS bilen præsenteres nærmere<br />
efterfølgende.<br />
Overordnet fokuseres der i projektet<br />
på at udvikle nen prototype på et MKS<br />
til opmåling af kørebanen, set som ét<br />
objekt. Dette udformes som en sensor<br />
integration 2 af laserskanneren og den<br />
mobile platform som DyRoS udgør.<br />
Fokus i projektet var derfor:<br />
• Systemkonstruktion,<br />
• Systemkalibrering, og<br />
• Koordinatberegning.<br />
Vi afgrænsede os derimod fra:<br />
• Tidssynkronisering,<br />
• Softwareudvikling,<br />
• Efterfølgende databehandling, og<br />
• Automatiseret dataprocessering.<br />
Opmålingen repræsenteres ved en<br />
punkt sky fra laserskanneren, og ud<br />
fra punktskyen kan de ønskede informationer<br />
efterfølgende uddrages. Det<br />
kan f.eks. være hældnings-, længde- og<br />
tværprofiler eller vejstriber. Det vil sige,<br />
at der med prototypen tilvejebringes en<br />
punktsky, der gør det muligt efterfølgende<br />
at danne en nøjagtig flademodel<br />
af kørebanen, da den typiske anvendelse<br />
af modellen vil være i forbindelse<br />
med udvidelse eller omlægning<br />
af kørebanen. Kravet til den relative<br />
nøjagtighed af denne model er 0,5–1<br />
cm i højden og lidt over i planen. Den<br />
<strong>landinspektøren</strong> 1 | 2006<br />
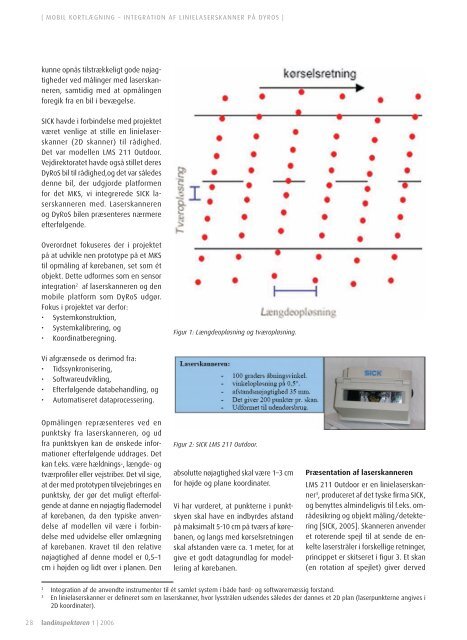
Figur 1: Længdeopløsning og tværopløsning.<br />
Figur 2: SICK LMS 211 Outdoor.<br />
absolutte nøjagtighed skal være 1–3 cm<br />
for højde og plane koordinater.<br />
Vi har vurderet, at punkterne i punktskyen<br />
skal have en indbyrdes afstand<br />
på maksimalt 5-10 cm på tværs af kørebanen,<br />
og langs med kørselsretningen<br />
skal afstanden være ca. 1 meter, for at<br />
give et godt datagrundlag for modellering<br />
af kørebanen.<br />
Præsentation af laserskanneren<br />
LMS 211 Outdoor er en linielaserskanner3<br />
, produceret af det tyske firma SICK,<br />
og benyttes almindeligvis til f.eks. områdesikring<br />
og objekt måling/detektering<br />
[SICK, 2005]. Skanneren anvender<br />
et roterende spejl til at sende de enkelte<br />
laserstråler i forskellige retninger,<br />
princippet er skitseret i figur 3. Et skan<br />
(en rotation af spejlet) giver derved<br />
2 Integration af de anvendte instrumenter til ét samlet system i både hard- og softwaremæssig forstand.<br />
3 En linielaserskanner er defineret som en laserskanner, hvor lysstrålen udsendes således der dannes et 2D plan (laserpunkterne angives i<br />
2D koordinater).