landinspektøren - Ida
landinspektøren - Ida
landinspektøren - Ida

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
32<br />
| MOBIL KORTLÆGNING – INTEGRATION AF LINIELASERSKANNER PÅ DYROS |<br />
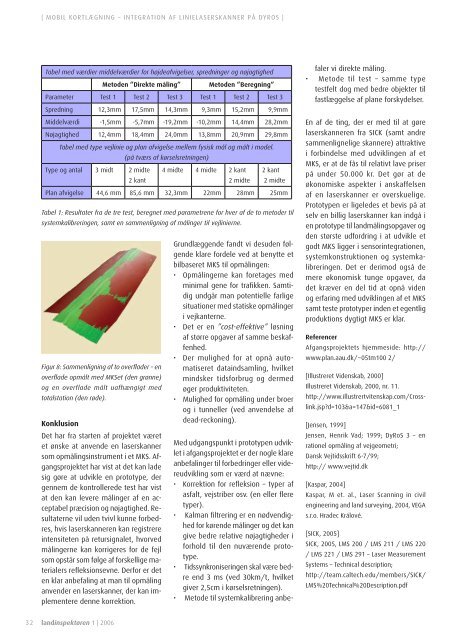
Tabel med værdier middelværdier for højdeafvigelser, spredninger og nøjagtighed<br />
Konklusion<br />
Det har fra starten af projektet været<br />
et ønske at anvende en laserskanner<br />
som opmålingsinstrument i et MKS. Afgangsprojektet<br />
har vist at det kan lade<br />
sig gøre at udvikle en prototype, der<br />
gennem de kontrollerede test har vist<br />
at den kan levere målinger af en acceptabel<br />
præcision og nøjagtighed. Resultaterne<br />
vil uden tvivl kunne forbedres,<br />
hvis laserskanneren kan registrere<br />
intensiteten på retursignalet, hvorved<br />
målingerne kan korrigeres for de fejl<br />
som opstår som følge af forskellige materialers<br />
refleksionsevne. Derfor er det<br />
en klar anbefaling at man til opmåling<br />
anvender en laserskanner, der kan implementere<br />
denne korrektion.<br />
<strong>landinspektøren</strong> 1 | 2006<br />
Metoden ”Direkte måling” Metoden ”Beregning”<br />
Parameter Test 1 Test 2 Test 3 Test 1 Test 2 Test 3<br />
Spredning 12,3mm 17,5mm 14,3mm 9,3mm 15,2mm 9,9mm<br />
Middelværdi -1,5mm -5,7mm -19,2mm -10,2mm 14,4mm 28,2mm<br />
Nøjagtighed 12,4mm 18,4mm 24,0mm 13,8mm 20,9mm 29,8mm<br />
Tabel med type vejlinie og plan afvigelse mellem fysisk mål og målt i model.<br />
(på tværs af kørselsretningen)<br />
Type og antal 3 midt 2 midte 4 midte 4 midte 2 kant 2 kant<br />
2 kant<br />
2 midte 2 midte<br />
Plan afvigelse 44,6 mm 85,6 mm 32,3mm 22mm 28mm 25mm<br />
Tabel 1: Resultater fra de tre test, beregnet med parametrene for hver af de to metoder til<br />
systemkalibreringen, samt en sammenligning af målinger til vejlinierne.<br />
Figur 8: Sammenligning af to overflader – en<br />
overflade opmålt med MKSet (den grønne)<br />
og en overflade målt uafhængigt med<br />
totalstation (den røde).<br />
Grundlæggende fandt vi desuden følgende<br />
klare fordele ved at benytte et<br />
bilbaseret MKS til opmålingen:<br />
• Opmålingerne kan foretages med<br />
minimal gene for trafikken. Samtidig<br />
undgår man potentielle farlige<br />
situationer med statiske opmålinger<br />
i vejkanterne.<br />
• Det er en ”cost-effektive” løsning<br />
af større opgaver af samme beskaffenhed.<br />
• Der mulighed for at opnå automatiseret<br />
dataindsamling, hvilket<br />
mindsker tidsforbrug og dermed<br />
øger produktiviteten.<br />
• Mulighed for opmåling under broer<br />
og i tunneller (ved anvendelse af<br />
dead-reckoning).<br />
Med udgangspunkt i prototypen udviklet<br />
i afgangsprojektet er der nogle klare<br />
anbefalinger til forbedringer eller videreudvikling<br />
som er værd at nævne:<br />
• Korrektion for refleksion – typer af<br />
asfalt, vejstriber osv. (en eller flere<br />
typer).<br />
• Kalman filtrering er en nødvendighed<br />
for kørende målinger og det kan<br />
give bedre relative nøjagtigheder i<br />
forhold til den nuværende prototype.<br />
• Tidssynkroniseringen skal være bedre<br />
end 3 ms (ved 30km/t, hvilket<br />
giver 2,5cm i kørselsretningen).<br />
• Metode til systemkalibrering anbe-<br />
faler vi direkte måling.<br />
• Metode til test – samme type<br />
testfelt dog med bedre objekter til<br />
fastlæggelse af plane forskydelser.<br />
En af de ting, der er med til at gøre<br />
laserskanneren fra SICK (samt andre<br />
sammenlignelige skannere) attraktive<br />
i forbindelse med udviklingen af et<br />
MKS, er at de fås til relativt lave priser<br />
på under 50.000 kr. Det gør at de<br />
økonomiske aspekter i anskaffelsen<br />
af en laserskanner er overskuelige.<br />
Prototypen er ligeledes et bevis på at<br />
selv en billig laserskanner kan indgå i<br />
en prototype til landmålingsopgaver og<br />
den største udfordring i at udvikle et<br />
godt MKS ligger i sensorintegrationen,<br />
systemkonstruktionen og systemkalibreringen.<br />
Det er derimod også de<br />
mere økonomisk tunge opgaver, da<br />
det kræver en del tid at opnå viden<br />
og erfaring med udviklingen af et MKS<br />
samt teste prototyper inden et egentlig<br />
produktions dygtigt MKS er klar.<br />
Referencer<br />
Afgangsprojektets hjemmeside: http://<br />
www.plan.aau.dk/~05tm100 2/<br />
[Illustreret Videnskab, 2000]<br />
Illustreret Videnskab, 2000, nr. 11.<br />
http://www.illustrertvitenskap.com/Crosslink.jsp?d=103&a=147&id=6081_1<br />
[Jensen, 1999]<br />
Jensen, Henrik Vad; 1999; DyRoS 3 – en<br />
rationel opmåling af vejgeometri;<br />
Dansk Vejtidsskrift 6-7/99;<br />
http:// www.vejtid.dk<br />
[Kaspar, 2004]<br />
Kaspar, M et. al., Laser Scanning in civil<br />
engineering and land surveying, 2004, VEGA<br />
s.r.o. Hradec Králové.<br />
[SICK, 2005]<br />
SICK, 2005, LMS 200 / LMS 211 / LMS 220<br />
/ LMS 221 / LMS 291 – Laser Measurement<br />
Systems – Technical description;<br />
http://team.caltech.edu/members/SICK/<br />
LMS%20Technical%20Description.pdf