landinspektøren - Ida
landinspektøren - Ida
landinspektøren - Ida

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
en række punkter, der ligger på en linie.<br />
Bredden af et skan afgrænses af<br />
åbningsvinklen på 100°, som konkret<br />
er angivet ved en fysisk begrænsning<br />
i konstruktionen af laserskanneren.<br />
Punkttætheden i et skan afhænger af<br />
vinkelopløsningen, det vil sige vinklen<br />
mellem to laserstråler i et skan. Skanneren<br />
kan arbejde med en vinkelopløsning<br />
på enten 0,25°, 0,5° eller 1°.<br />
I projektet sættes vinkelopløsningen<br />
til 0,5° af hensyn til punkttætheden,<br />
som beskrevet ovenfor maksimalt skal<br />
være 5-10 cm på tværs af kørebanen.<br />
Med en åbningsvinkel på 100° giver et<br />
skan dermed 200 punkter. Laserskanneren<br />
måler tilfældige punkter, der måles<br />
altså ikke direkte til det objekt, der ønskes<br />
målt f.eks. bund af kørebanespor.<br />
Denne metode kaldes for ikke-selektive<br />
målinger i modsætning til selektive<br />
målinger, som kan foretages med<br />
f.eks. fotogrammetri eller måling med<br />
totalstation [Kaspar, 2004] Det er derfor<br />
| MOBIL KORTLÆGNING – INTEGRATION AF LINIELASERSKANNER PÅ DYROS |<br />
nødvendig med relativt mange punkter<br />
for at kunne få et fornuftigt datagrundlag<br />
for modelleringen.<br />
Skanneren måler ligeledes efter puls<br />
metoden, eller på engelsk ”time of<br />
flight” princippet. Derfor er der ikke er<br />
tale om en konstant laserstråle, men<br />
en række meget korte laserpulser<br />
(”beams”) [SICK, 2005]. Det vil sige<br />
at afstanden beregnes ud fra tidsforskellen,<br />
fra en laserpuls afsendes, til<br />
det reflekterede signal returneres og<br />
modtages.<br />
Laserskanneren kan ifølge SICK måle<br />
intensiteten på retursignalet, hvormed<br />
det er muligt at korrigere målingerne<br />
og dermed opnå en højere nøjagtighed.<br />
Det skyldes, at forskellige materialer<br />
(afhængig af f.eks. farve og struktur)<br />
reflekterer lasersignalet forskelligt, og<br />
dermed går der kortere eller længere<br />
tid, inden laserskanneren har mod-<br />
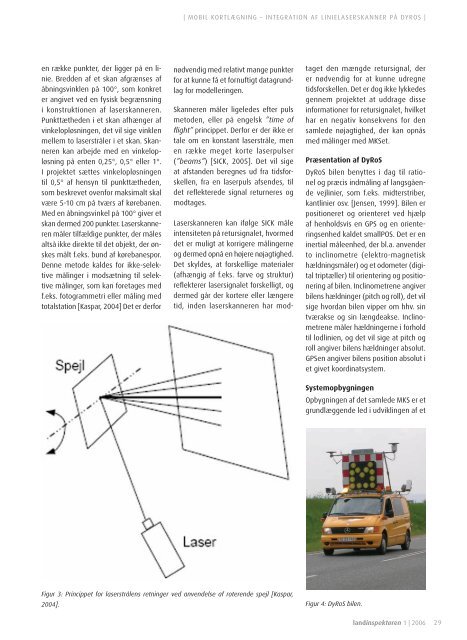
Figur 3: Princippet for laserstrålens retninger ved anvendelse af roterende spejl [Kaspar,<br />
2004].<br />
taget den mængde retursignal, der<br />
er nødvendig for at kunne udregne<br />
tidsforskellen. Det er dog ikke lykkedes<br />
gennem projektet at uddrage disse<br />
informationer for retursignalet, hvilket<br />
har en negativ konsekvens for den<br />
samlede nøjagtighed, der kan opnås<br />
med målinger med MKSet.<br />
Præsentation af DyRoS<br />
DyRoS bilen benyttes i dag til rationel<br />
og præcis indmåling af langsgående<br />
vejlinier, som f.eks. midterstriber,<br />
kantlinier osv. [Jensen, 1999]. Bilen er<br />
positioneret og orienteret ved hjælp<br />
af henholdsvis en GPS og en orienteringsenhed<br />
kaldet smallPOS. Det er en<br />
inertial måleenhed, der bl.a. anvender<br />
to inclinometre (elektro-magnetisk<br />
hældningsmåler) og et odometer (digital<br />
triptæller) til orientering og positionering<br />
af bilen. Inclinometrene angiver<br />
bilens hældninger (pitch og roll), det vil<br />
sige hvordan bilen vipper om hhv. sin<br />
tværakse og sin længdeakse. Inclinometrene<br />
måler hældningerne i forhold<br />
til lodlinien, og det vil sige at pitch og<br />
roll angiver bilens hældninger absolut.<br />
GPSen angiver bilens position absolut i<br />
et givet koordinatsystem.<br />
Systemopbygningen<br />
Opbygningen af det samlede MKS er et<br />
grundlæggende led i udviklingen af et<br />
Figur 4: DyRoS bilen.<br />
<strong>landinspektøren</strong> 1 | 2006<br />
29