

Interaktive Simulation am Beispiel einer ... - Baumaschine.de
Interaktive Simulation am Beispiel einer ... - Baumaschine.de
Interaktive Simulation am Beispiel einer ... - Baumaschine.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
5. Fachtagung <strong>Baumaschine</strong>ntechnik 2012 Technische Universität Dres<strong>de</strong>n<br />
3 <strong>Simulation</strong>smo<strong>de</strong>ll <strong>de</strong>r Tunnelspritzmaschine<br />
Das Mo<strong>de</strong>ll <strong>de</strong>r Tunnelspritzmaschine besteht aus einem Starrkörpermo<strong>de</strong>ll, <strong>de</strong>m Mo<strong>de</strong>ll<br />
für <strong>de</strong>n hydraulischen Antrieb sowie <strong>de</strong>n Schnittstellen zu einem vereinfachten Prozessmo<strong>de</strong>ll.<br />
Das Mo<strong>de</strong>ll wird in Mo<strong>de</strong>lica beschrieben, wobei die Teilmo<strong>de</strong>lle durch entsprechend<br />
abstrahierte Schnittstellen miteinan<strong>de</strong>r verbun<strong>de</strong>n sind. Dies ermöglicht <strong>de</strong>n flexiblen<br />
Austausch <strong>de</strong>r Mo<strong>de</strong>lle und vereinfacht die Abbildung von Varianten.<br />
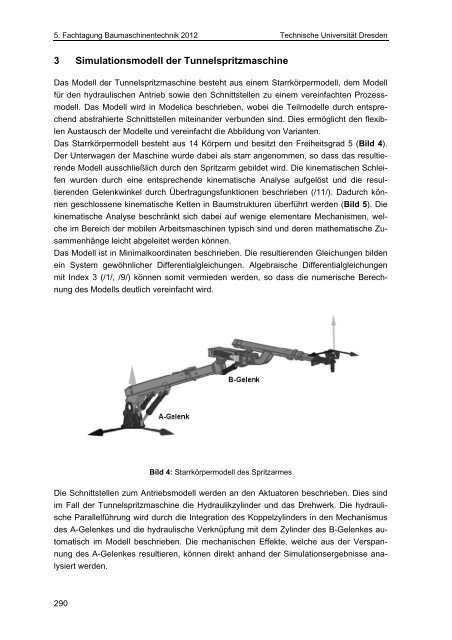
Das Starrkörpermo<strong>de</strong>ll besteht aus 14 Körpern und besitzt <strong>de</strong>n Freiheitsgrad 5 (Bild 4).<br />
Der Unterwagen <strong>de</strong>r Maschine wur<strong>de</strong> dabei als starr angenommen, so dass das resultieren<strong>de</strong><br />
Mo<strong>de</strong>ll ausschließlich durch <strong>de</strong>n Spritzarm gebil<strong>de</strong>t wird. Die kinematischen Schleifen<br />
wur<strong>de</strong>n durch eine entsprechen<strong>de</strong> kinematische Analyse aufgelöst und die resultieren<strong>de</strong>n<br />
Gelenkwinkel durch Übertragungsfunktionen beschrieben (/11/). Dadurch können<br />
geschlossene kinematische Ketten in Baumstrukturen überführt wer<strong>de</strong>n (Bild 5). Die<br />
kinematische Analyse beschränkt sich dabei auf wenige elementare Mechanismen, welche<br />
im Bereich <strong>de</strong>r mobilen Arbeitsmaschinen typisch sind und <strong>de</strong>ren mathematische Zus<strong>am</strong>menhänge<br />
leicht abgeleitet wer<strong>de</strong>n können.<br />
Das Mo<strong>de</strong>ll ist in Minimalkoordinaten beschrieben. Die resultieren<strong>de</strong>n Gleichungen bil<strong>de</strong>n<br />
ein System gewöhnlicher Differentialgleichungen. Algebraische Differentialgleichungen<br />
mit In<strong>de</strong>x 3 (/1/, /9/) können somit vermie<strong>de</strong>n wer<strong>de</strong>n, so dass die numerische Berechnung<br />
<strong>de</strong>s Mo<strong>de</strong>lls <strong>de</strong>utlich vereinfacht wird.<br />
290<br />
Bild 4: Starrkörpermo<strong>de</strong>ll <strong>de</strong>s Spritzarmes<br />
Die Schnittstellen zum Antriebsmo<strong>de</strong>ll wer<strong>de</strong>n an <strong>de</strong>n Aktuatoren beschrieben. Dies sind<br />
im Fall <strong>de</strong>r Tunnelspritzmaschine die Hydraulikzylin<strong>de</strong>r und das Drehwerk. Die hydraulische<br />
Parallelführung wird durch die Integration <strong>de</strong>s Koppelzylin<strong>de</strong>rs in <strong>de</strong>n Mechanismus<br />
<strong>de</strong>s A-Gelenkes und die hydraulische Verknüpfung mit <strong>de</strong>m Zylin<strong>de</strong>r <strong>de</strong>s B-Gelenkes automatisch<br />
im Mo<strong>de</strong>ll beschrieben. Die mechanischen Effekte, welche aus <strong>de</strong>r Verspannung<br />
<strong>de</strong>s A-Gelenkes resultieren, können direkt anhand <strong>de</strong>r <strong>Simulation</strong>sergebnisse analysiert<br />
wer<strong>de</strong>n.









