10.3 Statische Momente, Schwerpunkte und Trägheitsmomente
10.3 Statische Momente, Schwerpunkte und Trägheitsmomente
10.3 Statische Momente, Schwerpunkte und Trägheitsmomente

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>10.3</strong><br />
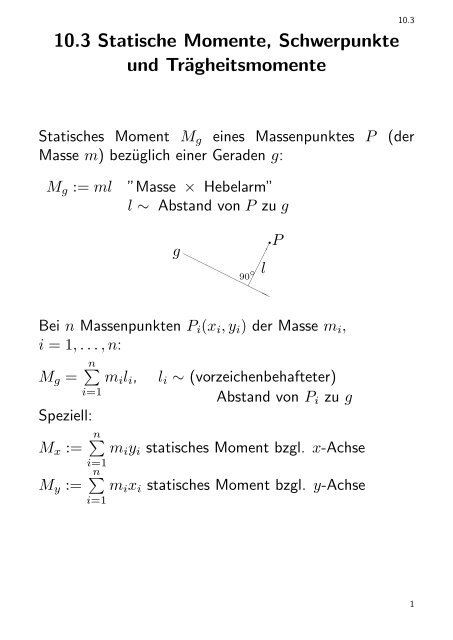
<strong>10.3</strong> <strong>Statische</strong> <strong>Momente</strong>, <strong>Schwerpunkte</strong><br />
<strong>und</strong> <strong>Trägheitsmomente</strong><br />
<strong>Statische</strong>s Moment M g eines Massenpunktes P (der<br />
Masse m) bezüglich einer Geraden g:<br />
M g := ml<br />
”Masse × Hebelarm”<br />
l ∼ Abstand von P zu g<br />
P<br />
g ❍❍❍❍❍❍❍❍❍❍❍<br />
✁ ✁✁✁✁ l<br />
90 ◦<br />
✁<br />
❍<br />
Bei n Massenpunkten P i (x i , y i ) der Masse m i ,<br />
i = 1, . . . , n:<br />
∑<br />
M g = n m i l i , l i ∼ (vorzeichenbehafteter)<br />
i=1<br />
Abstand von P i zu g<br />
Speziell:<br />
∑<br />
M x := n m i y i statisches Moment bzgl. x-Achse<br />
i=1<br />
M y := n ∑<br />
i=1<br />
m i x i statisches Moment bzgl. y-Achse<br />
1
<strong>10.3</strong><br />
<strong>Statische</strong>s Moment eines ebenen, mit Masse<br />
belegten Kurvenbogens B bezüglich der Koordinatenachsen<br />
(Dichte [Masse pro Längeneinheit] sei konstant = 1, d. h.<br />
Masse eines Bogenstückes = Länge dieses Bogenstückes):<br />
y<br />
✻<br />
Q k−1<br />
<br />
❄ Q k<br />
<br />
y = f(x)<br />
Kurvenbogen B :=<br />
<br />
x 0<br />
a<br />
<br />
<br />
x k−1 ξ k<br />
{ ( x<br />
)<br />
f(x)<br />
∣<br />
<br />
x k<br />
✲<br />
x n x<br />
b<br />
}<br />
a ≤ x ≤ b .<br />
Sei {Z n } eine ausgezeichnete Zerlegungsfolge von [a, b].<br />
Z n : a = x 0 < x 1 < . . . < x n = b<br />
Betrachte das Sehnenpolygon, welches durch die Punkte<br />
( xk<br />
f(x k ))<br />
, k = 0, . . . , n, verläuft, yk := f(x k ).<br />
2
<strong>10.3</strong><br />
<strong>Statische</strong>s Moment M x von B bzgl. x-Achse:<br />
M x ≈<br />
n ∑<br />
k=1<br />
l k △s k , △s k = √ (x k − x k−1 ) 2 + (y k − y k−1 ) 2<br />
√<br />
( )<br />
yk − y 2<br />
k−1<br />
= 1 +<br />
(x k − x k−1 )<br />
x k − x k−1<br />
= √ 1 + f ′2 (ξ k ) · (x k − x k−1 ),<br />
MW S, x k−1 < ξ k < x k<br />
M x = lim<br />
n→∞<br />
n∑<br />
k=1<br />
f(ξ k ) √ 1 + f ′2 (ξ k )(x k − x k−1 )<br />
(gewählt: l k = f(ξ k ))<br />
M x =<br />
∫ b<br />
a<br />
f(x) √ 1 + f ′2 (x) dx<br />
} {{ }<br />
ds<br />
=<br />
∫ s b<br />
s a<br />
y ds<br />
analog:<br />
<strong>Statische</strong>s Moment M y von B bzgl. y-Achse:<br />
n∑<br />
M y = lim ξ k △s k<br />
n→∞<br />
k=1<br />
M y =<br />
∫ b<br />
x √ 1 + f ′2 (x) dx =<br />
∫ s b<br />
x ds<br />
a<br />
s a<br />
3
<strong>10.3</strong><br />
Beispiel:<br />
<strong>Statische</strong> <strong>Momente</strong> des Halbkreisbogens<br />
x 2 + y 2 = r 2 , y ≥ 0 bzgl. der Koordinatenachsen:<br />
<br />
−r<br />
M x =<br />
=<br />
M y =<br />
y<br />
∫ s b<br />
✻<br />
<br />
S<br />
x = r cos t,<br />
y = r sin t,<br />
<br />
r<br />
✲<br />
x<br />
ẋ = −r sin t<br />
ẏ = r cos t<br />
0 ≤ t ≤ π<br />
s a<br />
y ds , ds = √ ẋ 2 + ẏ 2 dt = r dt<br />
∫ π<br />
0<br />
r 2 sin t dt<br />
= −r 2 cos t<br />
∫ s b<br />
s a<br />
x ds =<br />
∣<br />
π<br />
0<br />
∫ π<br />
0<br />
= r 2 (1 − (−1)) = 2r 2<br />
r 2 cos t dt = r 2 sin t<br />
∣<br />
π<br />
0<br />
= 0<br />
Anschaulich:<br />
Halbkreis ist bzgl. y-Achse im Gleichgewicht; bzgl. der<br />
x-Achse hat er das Moment M x = 2r 2 <strong>und</strong> könnte durch<br />
eine im Schwerpunkt<br />
S(x s = 0, y s = 2 r) angebrachte Punktmasse der Masse<br />
π<br />
πr ersetzt werden.<br />
4
<strong>10.3</strong><br />
Als Schwerpunkt S(x s , y s ) eines Kurvenbogens C wird<br />
der Punkt bezeichnet, der dieselben statischen <strong>Momente</strong><br />
besitzt wie C, wenn in ihm die gesamte Masse m von C<br />
vereinigt wird.<br />
→ M x = y s · m, M y = x s · m, m =<br />
∫ s b<br />
s a<br />
ds<br />
→<br />
∫s b<br />
x s = M x ds<br />
y<br />
m = s a<br />
∫s b<br />
ds<br />
s a<br />
∫s b<br />
, y s = M y ds<br />
x<br />
m = s a<br />
∫s b<br />
ds<br />
s a<br />
Beispiel:<br />
Schwerpunkt des oberen Halbkreisbogens:<br />
m =<br />
∫ π<br />
√ẋ2<br />
+ ẏ 2 dt =<br />
∫ π<br />
rdt = πr<br />
0<br />
Bogenlänge des Halbkreises<br />
0<br />
x s = M y<br />
πr<br />
y s = M x<br />
πr<br />
= 0<br />
πr<br />
= 2r2<br />
πr<br />
= 0<br />
= 2 π r ≈ 0, 63662r 5
<strong>10.3</strong><br />
<strong>Statische</strong>s Moment einer ebenen Fläche:<br />
Die Fläche F zwischen den beiden Kurven<br />
y = f(x) <strong>und</strong> y = g(x) im Intervall a ≤ x ≤ b (wobei<br />
f ≥ g in [a, b] vorausgesetzt werde) sei homogen mit<br />
Masse (der konstanten Dichte 1) belegt.<br />
Ausgezeichnete Zerlegungsfolge Z n :<br />
a = x 0 < x 1 < . . . < x n = b<br />
ξ k := x k−1 + x k<br />
sei Mittelpunkt des k-ten Teilintervalls<br />
2<br />
△x k := x k − x k−1 . Das Rechteck R k mit Breite<br />
△x ( k <strong>und</strong> Höhe f(ξ k ) − g(ξ k ) besitzt den Schwerpunkt<br />
ξ k , f(ξ )<br />
k) + g(ξ k )<br />
<strong>und</strong> die<br />
2<br />
statischen <strong>Momente</strong><br />
m k x<br />
= f(ξ k) + g(ξ k )<br />
} {{ 2 }<br />
Abstand<br />
zur x-Achse<br />
· (f(ξ k ) − g(ξ k )) △x k<br />
} {{ }<br />
Masse von R k<br />
bzgl. x-Achse<br />
m k y<br />
= ξ<br />
} {{ k<br />
}<br />
Abstand<br />
zur y-Achse<br />
· (f(ξ k ) − g(ξ k )) △x k<br />
} {{ }<br />
Masse von R k<br />
bzgl. y-Achse<br />
6
<strong>10.3</strong><br />
<strong>Statische</strong>s Moment von F zur x-Achse:<br />
M x = lim<br />
n→∞<br />
n∑<br />
k=1<br />
m k x = 1 2<br />
∫ b<br />
a<br />
(<br />
f 2 (x) − g 2 (x) ) dx<br />
<strong>Statische</strong>s Moment von F zur y-Achse:<br />
M y = lim<br />
n→∞<br />
n∑<br />
k=1<br />
m k y =<br />
∫ b<br />
a<br />
x (f(x) − g(x)) dx<br />
Schwerpunkt S(x s , y s ) der Fläche F :<br />
x s = M y<br />
A , y s = M x<br />
A ,<br />
wobei A :=<br />
∫ b<br />
a<br />
(f(x) − g(x)) dx ∼ Fläche von F .<br />
7
<strong>Trägheitsmomente</strong><br />
<strong>10.3</strong><br />
Sei X (t) := ( x(t)<br />
y(t))<br />
, 0 ≤ t ≤ t0 , die Bahnkurve eines<br />
Massenpunktes P der Masse m<br />
(X (t) ∼ Ortsvektor von P zur Zeit t).<br />
Geschwindigkeit V(t) von P :<br />
V (t) := lim<br />
△t→0<br />
X (t + △t) − X (t)<br />
△t<br />
=<br />
(ẋ(t) )<br />
ẏ(t)<br />
E k := m 2 v2 ist die kinetische Energie von P : wobei<br />
v = ||V(t)||.<br />
Speziell: Rotation von P auf einem Kreis mit<br />
(konstantem) Radius r <strong>und</strong> Mittelpunkt 0:<br />
x(t) = r cos ϕ(t), ẋ(t) = (−r sin ϕ(t)) ˙ϕ(t)<br />
y(t) = r sin ϕ(t), ẏ(t) = (−r cos ϕ(t)) ˙ϕ(t)<br />
ω(t) = ˙ϕ(t) ∼ Winkelgeschwindigkeit<br />
E k = m 2 v2<br />
= m 2<br />
= m 2 r2 ˙ϕ 2 (t)<br />
(ẋ2<br />
(t) + ẏ 2 (t) )<br />
= 1 2 mr2 }{{} · ω2 (t)<br />
8
<strong>10.3</strong><br />
Θ := mr 2 heißt Trägheitsmoment des materiellen<br />
Punktes P mit Masse m bzgl. einer festen Achse;<br />
r ist der Abstand von P zur Achse.<br />
Θ := N ∑<br />
i=1<br />
m i ri 2 ∼ Trägheitsmoment von N<br />
Punkten P 1 , . . . , P N in den<br />
Abständen r 1 , . . . , r N von der<br />
Drehachse mit den Massen<br />
m 1 , . . . , m N .<br />
<strong>Trägheitsmomente</strong> eines homogenen { mit Masse<br />
(<br />
belegten Kurvenbogens B = x<br />
f(x)) ∣ }<br />
∣∣ a ≤ x ≤ b<br />
(mit konstanter Massendichte = 1):<br />
Ausgezeichnete Zerlegungsfolge Z n :<br />
a = x 0 < x 1 < . . . < x n = b<br />
Betrachte das Sehnenpolygon, welches durch die Punkte<br />
( xk<br />
f(x k ))<br />
verläuft, k = 0, . . . , n.<br />
Trägheitsmoment von B bzgl. x-Achse:<br />
Θ x ≈<br />
n ∑<br />
k=1<br />
r 2 k · △s k, △s k = √ (x k − x k−1 ) 2 + (y k − y k−1 ) 2<br />
√<br />
( )<br />
yk − y 2<br />
k−1<br />
= 1 +<br />
(x k − x k−1 )<br />
x k − x k−1<br />
= √ 1 + f ′2 (ξ k ) · (x k − x k−1 ),<br />
MW S, x k−1 < ξ k < x k<br />
9
<strong>10.3</strong><br />
Θ x = lim<br />
n→∞<br />
n∑<br />
k=1<br />
f 2 (ξ k ) √ 1 + f ′2 (ξ k ) (x k − x k−1 )<br />
(gewählt: r k = f(ξ k ))<br />
Θ x =<br />
∫ b<br />
f 2 (x) √ 1 + f ′2 (x) dx =<br />
∫ s b<br />
y 2 ds<br />
a<br />
s a<br />
Analog: Trägheitsmoment von B bzgl. y-Achse:<br />
Θ y = lim<br />
n→∞<br />
n∑<br />
k=1<br />
ξ 2 k√<br />
1 + f<br />
′2<br />
(ξ k ) (x k − x k−1 )<br />
Θ y =<br />
∫ b<br />
x 2√ 1 + f ′2 (x) dx =<br />
∫ s b<br />
x 2 ds<br />
a<br />
s a<br />
10
<strong>10.3</strong><br />
Beispiel: Trägheitsmoment des Zykloidenbogens<br />
{ (x ) ∣ B = ∣∣ x = a(t − sin t), y = a(1 − cos t), 0 ≤ t ≤ 2π}<br />
y<br />
bzgl. der x-Achse<br />
ẋ = a(1 − cos t), ẏ = a sin t,<br />
ẋ 2 + ẏ 2 = a 2 (1 − cos t) 2 + a 2 sin 2 t<br />
= 2a 2 (1 − cos t)<br />
Θ x =<br />
=<br />
∫ s 1 ∫ 2π<br />
s 0<br />
y 2 ds =<br />
0<br />
∫ 2π<br />
y 2√ ẋ 2 + ẏ 2 dt<br />
[a(1 − cos t)] 2 √2a 2 (1 − cos t) dt<br />
0<br />
= a 3√ 2<br />
∫ 2π<br />
0<br />
= a 3 √ 2 · 2 5 2<br />
} {{ }<br />
8<br />
(1 − cos t) 5 2 dt<br />
1 − cos t = 1 − cos 2 t 2 + t<br />
sin2 2 = 2 t<br />
sin2 2<br />
∫ 2π<br />
0<br />
sin 5 t<br />
2 dt, sin t 2<br />
≥ 0 für 0 ≤ t ≤ 2π<br />
11
<strong>10.3</strong><br />
Erinnerung:<br />
∫<br />
∫<br />
sin n x dx = − 1 n sinn−1 x cos x + n − 1 ∫<br />
sin n−2 x dx<br />
n<br />
sin 5 x dx = − 1 5 sin4 x cos x + 4 ∫<br />
sin 3 x dx<br />
5<br />
⎡<br />
= − 1 5 sin4 x cos x + 4 ⎢<br />
5 ⎣ −1 3 sin2 x cos x + 2 ∫<br />
3<br />
= − cos x<br />
15<br />
(<br />
3 sin 4 x + 4 sin 2 )<br />
x + 8 + C<br />
⎤<br />
sin x dx⎥<br />
⎦<br />
} {{ }<br />
− cos x<br />
Das ergibt:<br />
Θ x = 8a 3 · 2<br />
Θ x = 16a3<br />
15<br />
[<br />
− cos t 2<br />
15<br />
(3 sin 4 t 2 + 4 sin2 t 2 + 8 )] 2π<br />
[−(−1) · 8 + 8] =<br />
256<br />
15 a3 12<br />
0