10.3 Statische Momente, Schwerpunkte und Trägheitsmomente
10.3 Statische Momente, Schwerpunkte und Trägheitsmomente
10.3 Statische Momente, Schwerpunkte und Trägheitsmomente

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>10.3</strong><br />
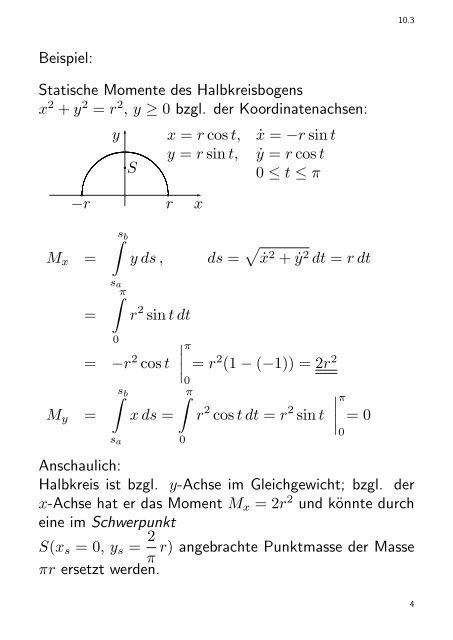
Beispiel:<br />
<strong>Statische</strong> <strong>Momente</strong> des Halbkreisbogens<br />
x 2 + y 2 = r 2 , y ≥ 0 bzgl. der Koordinatenachsen:<br />
<br />
−r<br />
M x =<br />
=<br />
M y =<br />
y<br />
∫ s b<br />
✻<br />
<br />
S<br />
x = r cos t,<br />
y = r sin t,<br />
<br />
r<br />
✲<br />
x<br />
ẋ = −r sin t<br />
ẏ = r cos t<br />
0 ≤ t ≤ π<br />
s a<br />
y ds , ds = √ ẋ 2 + ẏ 2 dt = r dt<br />
∫ π<br />
0<br />
r 2 sin t dt<br />
= −r 2 cos t<br />
∫ s b<br />
s a<br />
x ds =<br />
∣<br />
π<br />
0<br />
∫ π<br />
0<br />
= r 2 (1 − (−1)) = 2r 2<br />
r 2 cos t dt = r 2 sin t<br />
∣<br />
π<br />
0<br />
= 0<br />
Anschaulich:<br />
Halbkreis ist bzgl. y-Achse im Gleichgewicht; bzgl. der<br />
x-Achse hat er das Moment M x = 2r 2 <strong>und</strong> könnte durch<br />
eine im Schwerpunkt<br />
S(x s = 0, y s = 2 r) angebrachte Punktmasse der Masse<br />
π<br />
πr ersetzt werden.<br />
4