10.3 Statische Momente, Schwerpunkte und Trägheitsmomente
10.3 Statische Momente, Schwerpunkte und Trägheitsmomente
10.3 Statische Momente, Schwerpunkte und Trägheitsmomente

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>10.3</strong><br />
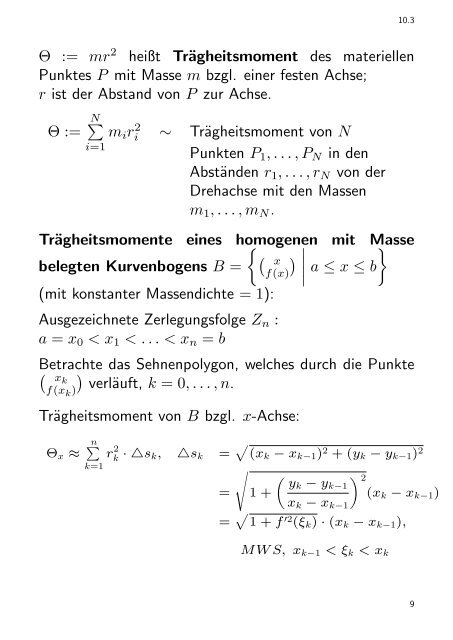
Θ := mr 2 heißt Trägheitsmoment des materiellen<br />
Punktes P mit Masse m bzgl. einer festen Achse;<br />
r ist der Abstand von P zur Achse.<br />
Θ := N ∑<br />
i=1<br />
m i ri 2 ∼ Trägheitsmoment von N<br />
Punkten P 1 , . . . , P N in den<br />
Abständen r 1 , . . . , r N von der<br />
Drehachse mit den Massen<br />
m 1 , . . . , m N .<br />
<strong>Trägheitsmomente</strong> eines homogenen { mit Masse<br />
(<br />
belegten Kurvenbogens B = x<br />
f(x)) ∣ }<br />
∣∣ a ≤ x ≤ b<br />
(mit konstanter Massendichte = 1):<br />
Ausgezeichnete Zerlegungsfolge Z n :<br />
a = x 0 < x 1 < . . . < x n = b<br />
Betrachte das Sehnenpolygon, welches durch die Punkte<br />
( xk<br />
f(x k ))<br />
verläuft, k = 0, . . . , n.<br />
Trägheitsmoment von B bzgl. x-Achse:<br />
Θ x ≈<br />
n ∑<br />
k=1<br />
r 2 k · △s k, △s k = √ (x k − x k−1 ) 2 + (y k − y k−1 ) 2<br />
√<br />
( )<br />
yk − y 2<br />
k−1<br />
= 1 +<br />
(x k − x k−1 )<br />
x k − x k−1<br />
= √ 1 + f ′2 (ξ k ) · (x k − x k−1 ),<br />
MW S, x k−1 < ξ k < x k<br />
9