Festkörperaktor-Antriebsvorrichtung mit einer in Rotation ...
Festkörperaktor-Antriebsvorrichtung mit einer in Rotation ...
Festkörperaktor-Antriebsvorrichtung mit einer in Rotation ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
DE 10 2005 024 317 B4 2009.04.09<br />
Potenzialänderung, welche dem von der Steuere<strong>in</strong>richtung<br />
6 angelegten Spannungs- oder Ladungswert<br />
überlagert wird.<br />
[0039] Mittels der Steuere<strong>in</strong>richtung 6 <strong>mit</strong> <strong>in</strong>tegrierter<br />
oder vorgeschalteter Detektorschaltung kann dadurch<br />
der Betrieb der Festkörperaktor-<strong>Antriebsvorrichtung</strong><br />
überwacht, geregelt und/oder gesteuert werden.<br />
Beispielsweise kann e<strong>in</strong>e übermäßige Last detektiert<br />
werden, welche auf die Welle 2 e<strong>in</strong>wirkt, so<br />
dass beispielsweise e<strong>in</strong> Blockierungszustand oder<br />
drohender Blockierungszustand erfasst werden<br />
kann. In e<strong>in</strong>em solchen Fall kann wahlweise e<strong>in</strong>e<br />
Warnfunktion durch Ansteuern <strong>e<strong>in</strong>er</strong> Anzeigee<strong>in</strong>richtung<br />
62 oder <strong>e<strong>in</strong>er</strong> akustischen Ausgabee<strong>in</strong>richtung<br />
63 und/oder e<strong>in</strong>e entsprechende Ansteuerung der<br />
Festkörperaktoren 11–14 zur Behebung der Störung<br />
durch die Steuere<strong>in</strong>richtung 6 veranlasst werden.<br />
Auch systembed<strong>in</strong>gte Überbelastungen durch beispielsweise<br />
erhöhte Temperaturen, welche <strong>in</strong> den<br />
Festkörperaktoren 11–14 wirken, können durch die<br />
Steuere<strong>in</strong>richtung 6 erkannt werden. Neben der Aktivierung<br />
von Funktionen <strong>mit</strong> direktem Bezug auf den<br />
Betrieb der Festkörperaktoren-<strong>Antriebsvorrichtung</strong> 0<br />
können auch externe Funktionalitäten angesteuert<br />
werden. Optional können auch Teile der Funktionalitäten<br />
<strong>e<strong>in</strong>er</strong> solchen Steuere<strong>in</strong>richtung 6 <strong>in</strong> Detektor-Schaltungsanordnungen<br />
611–614 ausgelagert<br />
werden, welche <strong>in</strong>tegrierter Bestandteil der Festkörperaktoren<br />
11–14 s<strong>in</strong>d oder <strong>mit</strong> diesen <strong>in</strong> Verb<strong>in</strong>dung<br />
stehen.<br />
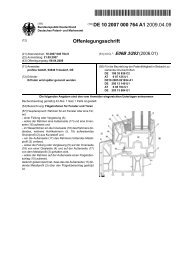
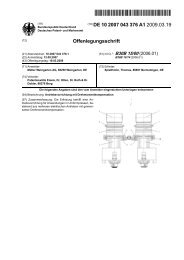
[0040] Fig. 1 und Fig. 2 zeigen die Festkörperaktor-<strong>Antriebsvorrichtung</strong><br />
0 unter Last. Beispielhaft liegt<br />
an der Welle 2 e<strong>in</strong> Wellen-Drehmoment M W<br />
an, das<br />
entgegen dem Uhrzeigers<strong>in</strong>n gerichtet ist. Das an der<br />
Welle 2 angreifende Wellen-Drehmoment M W<br />
wird im<br />
Kontaktpunkt zwischen der Antriebskörper-Innenwandung<br />
33 und der Welle 2 <strong>in</strong> Form <strong>e<strong>in</strong>er</strong> tangential<br />
gerichteten Kraft F T<br />
auf die Antriebskörper-Innenwandung<br />
33 übertragen und bewirkt dort e<strong>in</strong> Antriebskörper-Drehmoment<br />
M R<br />
bezüglich des Mittelpunktes<br />
des Antriebskörpers 31. Zwischen e<strong>in</strong>em<br />
Wellenradius r W<br />
und e<strong>in</strong>em Antriebskörper-Innenradius<br />
r R<br />
besteht der Zusammenhang<br />
[0041] Bei beispielhaften Radien im Bereich von 5<br />
mm bis 20 mm liegt e<strong>in</strong>e Radiusdifferenz bei 10<br />
μm–20 μm. Da der Wellenradius r W<br />
und der Antriebskörper-Innenradius<br />
r R<br />
ungefähr gleich s<strong>in</strong>d, d. h. r W<br />
≈<br />
r R<br />
gilt, werden die an der Welle angreifenden Drehmomente<br />
nahezu 1:1 auf den Antriebskörpers 31<br />
übertragen, so dass das Wellen-Drehmoment M W<br />
etwa gleich dem Antriebskörper-Drehmoment M R<br />
ist,<br />
d. h. M R<br />
≈ M W<br />
gilt. Das Antriebskörper-Drehmoment<br />
M R<br />
wird über den Antriebskörper 31 je nach Wirkrichtung<br />
auf alle oder e<strong>in</strong>en Teil der Festkörperaktoren<br />
11–14 übertragen und letztendlich von den Festkörperaktoren<br />
11–14 auf das Gehäuse 1 übertragen.<br />
[0042] Da jeder e<strong>in</strong>zelne der Festkörperaktoren<br />
11–14 vorzugsweise nur e<strong>in</strong>e ger<strong>in</strong>ge Biege- und<br />
Schersteifigkeit aufweist, aber axial sehr steif ist, wird<br />
der weitaus größte Anteil des Drehmomentes M R<br />
<strong>in</strong><br />
Form von Längskräften <strong>in</strong> die Piezokeramik als beispielhaftem<br />
Material der Festkörperaktoren 11–14<br />
e<strong>in</strong>geleitet und auf das Gehäuse 1 übertragen. Bei e<strong>in</strong>em<br />
Aufbau der Festkörperaktoren 11–14 <strong>mit</strong> <strong>e<strong>in</strong>er</strong><br />
Rohrfeder um den eigentlichen Aktor leistet e<strong>in</strong>e solche<br />
Rohrfeder nur e<strong>in</strong>en vernachlässigbar kle<strong>in</strong>en<br />
Beitrag bei <strong>e<strong>in</strong>er</strong> typischen Federrate c = 2 N/μm. Der<br />
Hauptbeitrag zur Steifigkeit rührt dabei von der Piezokeramik<br />
<strong>mit</strong> <strong>e<strong>in</strong>er</strong> typischen Steifigkeit c = 20 N/μm<br />
– 40 N/μm her.<br />
[0043] Bei der dargestellten Konfiguration s<strong>in</strong>d vier<br />
baugleiche Festkörperaktoren 11–14 h<strong>in</strong>sichtlich ihres<br />
Abstandes 2d symmetrisch zur x-Achse bzw.<br />
y-Achse der Ebene x, y am Antriebskörper 31 angeordnet,<br />
wobei sich die x-Achse und die y-Achse im<br />
R<strong>in</strong>g<strong>mit</strong>telpunkt schneiden. Aufgrund des z. B. entgegen<br />
dem Uhrzeigers<strong>in</strong>n wirkenden Wellen- bzw. Antriebskörper-Drehmomentes<br />
M W<br />
bzw. M R<br />
wird auf die<br />
erste Gruppe der Festkörperaktoren 11 und 13 e<strong>in</strong>e<br />
zusätzliche Druckkraft F 11<br />
bzw. F 13<br />
ausgeübt und auf<br />
die zweite Gruppe der Festkörperaktoren 12 und 14<br />
e<strong>in</strong>e zusätzliche Zugkraft F 12<br />
bzw. F 14<br />
ausgeübt.<br />
[0044] E<strong>in</strong> solcher Festkörperaktor 11–14 ist <strong>in</strong> dem<br />
Maße <strong>in</strong> der Lage, e<strong>in</strong>e Zugkraft zu übertragen, <strong>in</strong><br />
welchem z. B. der Piezokeramik durch die Rohrfeder<br />
beim Aufbau e<strong>in</strong>e Druckvorspannung e<strong>in</strong>geprägt<br />
wurde. Die Kräfte F 11<br />
bis F 14<br />
s<strong>in</strong>d aus Symmetriegründen<br />
betragsmäßig gleich groß bzw. nahezu gleich<br />
groß und bilden zwei Kräftepaare <strong>mit</strong> Abstand 2d, die<br />
sich zum Drehmoment M R<br />
≈ M W<br />
aufsummieren. Daher<br />
gilt näherungsweise:<br />
[0045] Bei e<strong>in</strong>em typischen Drehmoment von z. B. 2<br />
Nm und e<strong>in</strong>em typischen Abstand von z. B. d = 10<br />
mm ergibt sich e<strong>in</strong>e E<strong>in</strong>zelkraft von F = 50 N.<br />
[0046] Da z. B. e<strong>in</strong>e Piezokeramik als elektromechanischer<br />
Wandler solcher Festkörperaktoren<br />
11–14 <strong>in</strong> beiden Richtungen wirkt, wird sowohl durch<br />
das Anlegen e<strong>in</strong>es elektrischen Feldes bzw. durch<br />
das Aufbr<strong>in</strong>gen von Ladung auf e<strong>in</strong>e kapazitiv wirkende<br />
Vielschichtkeramik e<strong>in</strong>e mechanische Spannung<br />
aufgebaut bzw. e<strong>in</strong>e Deformation erzeugt, als auch<br />
durch das Anlegen <strong>e<strong>in</strong>er</strong> mechanischen Spannung<br />
bzw. Kraft, d. h. durch e<strong>in</strong>e erzwungene Deformation<br />
e<strong>in</strong>e elektrische Ladung generiert, die bei hochohmigem<br />
Klemmenabschluss aufgrund der Kapazität der<br />
Vielschichtkeramik als Potentialdifferenz zwischen<br />
den Klemmen abgreifbar ist. Bei Kräften von e<strong>in</strong>igen<br />
10 N werden Spannungen im Voltbereich bzw. La-<br />
5/11