Streng konvexe Hüllen
Streng konvexe Hüllen
Streng konvexe Hüllen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
L<br />
E<br />
P<br />
< 40 . 2<br />
-P radians<br />
E*<br />
V<br />
< 8 . 2<br />
-P radians<br />
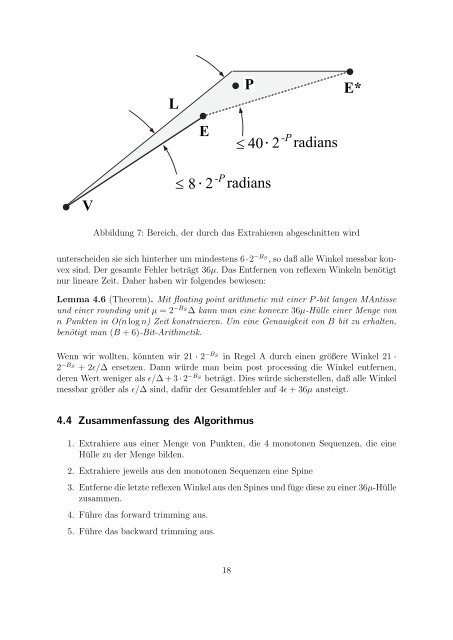
Abbildung 7: Bereich, der durch das Extrahieren abgeschnitten wird<br />
unterscheiden sie sich hinterher um mindestens 6·2 −B S<br />
, so daß alle Winkel messbar konvex<br />
sind. Der gesamte Fehler beträgt 36µ. Das Entfernen von reflexen Winkeln benötigt<br />
nur lineare Zeit. Daher haben wir folgendes bewiesen:<br />
Lemma 4.6 (Theorem). Mit floating point arithmetic mit einer P -bit langen MAntisse<br />
und einer rounding unit µ = 2 −B S<br />
∆ kann man eine <strong>konvexe</strong> 36µ-Hülle einer Menge von<br />
n Punkten in O(n log n) Zeit konstruieren. Um eine Genauigkeit von B bit zu erhalten,<br />
benötigt man (B + 6)-Bit-Arithmetik.<br />
Wenn wir wollten, könnten wir 21 · 2 −B S<br />
in Regel A durch einen größere Winkel 21 ·<br />
2 −B S<br />
+ 2ɛ/∆ ersetzen. Dann würde man beim post processing die Winkel entfernen,<br />
deren Wert weniger als ɛ/∆ + 3 · 2 −B S<br />
beträgt. Dies würde sicherstellen, daß alle Winkel<br />
messbar größer als ɛ/∆ sind, dafür der Gesamtfehler auf 4ɛ + 36µ ansteigt.<br />
4.4 Zusammenfassung des Algorithmus<br />
1. Extrahiere aus einer Menge von Punkten, die 4 monotonen Sequenzen, die eine<br />
Hülle zu der Menge bilden.<br />
2. Extrahiere jeweils aus den monotonen Sequenzen eine Spine<br />
3. Entferne die letzte reflexen Winkel aus den Spines und füge diese zu einer 36µ-Hülle<br />
zusammen.<br />
4. Führe das forward trimming aus.<br />
5. Führe das backward trimming aus.<br />
18