Streng konvexe Hüllen
Streng konvexe Hüllen
Streng konvexe Hüllen

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
1 Einführung<br />
1.1 Konvexe Hüllen<br />
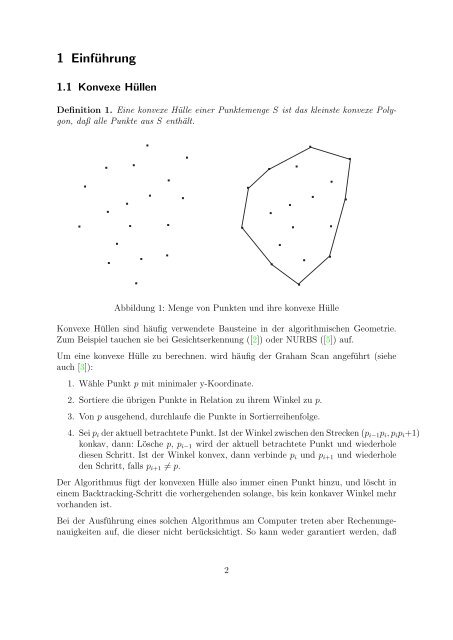
Definition 1. Eine <strong>konvexe</strong> Hülle einer Punktemenge S ist das kleinste <strong>konvexe</strong> Polygon,<br />
daß alle Punkte aus S enthält.<br />
Abbildung 1: Menge von Punkten und ihre <strong>konvexe</strong> Hülle<br />
Konvexe Hüllen sind häufig verwendete Bausteine in der algorithmischen Geometrie.<br />
Zum Beispiel tauchen sie bei Gesichtserkennung ([2]) oder NURBS ([5]) auf.<br />
Um eine <strong>konvexe</strong> Hülle zu berechnen. wird häufig der Graham Scan angeführt (siehe<br />
auch [3]):<br />
1. Wähle Punkt p mit minimaler y-Koordinate.<br />
2. Sortiere die übrigen Punkte in Relation zu ihrem Winkel zu p.<br />
3. Von p ausgehend, durchlaufe die Punkte in Sortierreihenfolge.<br />
4. Sei p i der aktuell betrachtete Punkt. Ist der Winkel zwischen den Strecken (p i−1 p i , p i p i +1)<br />
konkav, dann: Lösche p, p i−1 wird der aktuell betrachtete Punkt und wiederhole<br />
diesen Schritt. Ist der Winkel konvex, dann verbinde p i und p i+1 und wiederhole<br />
den Schritt, falls p i+1 ≠ p.<br />
Der Algorithmus fügt der <strong>konvexe</strong>n Hülle also immer einen Punkt hinzu, und löscht in<br />
einem Backtracking-Schritt die vorhergehenden solange, bis kein konkaver Winkel mehr<br />
vorhanden ist.<br />
Bei der Ausführung eines solchen Algorithmus am Computer treten aber Rechenungenauigkeiten<br />
auf, die dieser nicht berücksichtigt. So kann weder garantiert werden, daß<br />
2