RX-Mikrocontroller - elektronik industrie
RX-Mikrocontroller - elektronik industrie
RX-Mikrocontroller - elektronik industrie

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
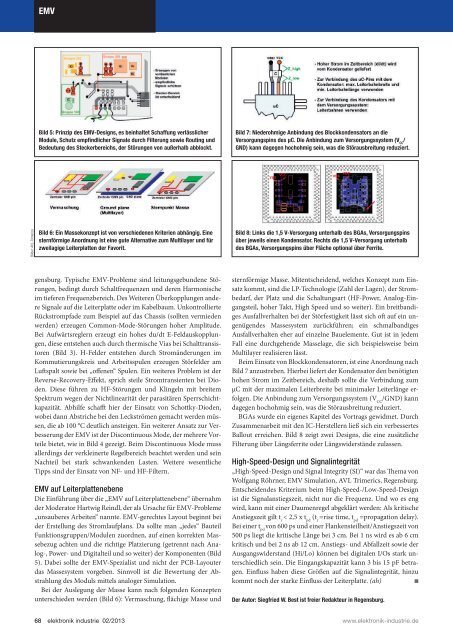
EMV<br />
Bild 5: Prinzip des EMV-Designs, es beinhaltet Schaffung verlässlicher<br />
Module, Schutz empfindlicher Signale durch Filterung sowie Routing und<br />
Bedeutung des Steckerbereichs, der Störungen von außerhalb abblockt.<br />
Bild 7: Niederohmige Anbindung des Blockkondensators an die<br />
Versorgungspins des µC. Die Anbindung zum Versorgungssystem (V CC<br />
/<br />
GND) kann dagegen hochohmig sein, was die Störausbreitung reduziert.<br />
Bilder: AVL-Trimerics<br />
Bild 6: Ein Massekonzept ist von verschiedenen Kriterien abhängig. Eine<br />
sternförmige Anordnung ist eine gute Alternative zum Multilayer und für<br />
zweilagige Leiterplatten der Favorit.<br />
Bild 8: Links die 1,5 V-Versorgung unterhalb des BGAs, Versorgungspins<br />
über jeweils einen Kondensator. Rechts die 1,5 V-Versorgung unterhalb<br />
des BGAs, Versorgungspins über Fläche optional über Ferrite.<br />
gensburg. Typische EMV-Probleme sind leitungsgebundene Störungen,<br />
bedingt durch Schaltfrequenzen und deren Harmonische<br />
im tieferen Frequenzbereich. Des Weiteren Überkopplungen andere<br />
Signale auf die Leiterplatte oder im Kabelbaum. Unkontrollierte<br />
Rückstrompfade zum Beispiel auf das Chassis (sollten vermieden<br />
werden) erzeugen Common-Mode-Störungen hoher Amplitude.<br />
Bei Aufwärtsreglern erzeugt ein hohes du/dt E-Feldauskopplungen,<br />
diese entstehen auch durch thermische Vias bei Schalttransistoren<br />
(Bild 3). H-Felder entstehen durch Stromänderungen im<br />
Kommutierungskreis und Arbeitsspulen erzeugen Störfelder am<br />
Luftspalt sowie bei „offenen“ Spulen. Ein weiteres Problem ist der<br />
Reverse-Recovery-Effekt, sprich steile Stromtransienten bei Dioden.<br />
Diese führen zu HF-Störungen und Klingeln mit breitem<br />
Spektrum wegen der Nichtlinearität der parasitären Sperrschichtkapazität.<br />
Abhilfe schafft hier der Einsatz von Schottky-Dioden,<br />
wobei dann Abstriche bei den Leckströmen gemacht werden müssen,<br />
die ab 100 °C deutlich ansteigen. Ein weiterer Ansatz zur Verbesserung<br />
der EMV ist der Discontinuous Mode, der mehrere Vorteile<br />
bietet, wie in Bild 4 gezeigt. Beim Discontinuous Mode muss<br />
allerdings der verkleinerte Regelbereich beachtet werden und sein<br />
Nachteil bei stark schwankenden Lasten. Weitere wesentliche<br />
Tipps sind der Einsatz von NF- und HF-Filtern.<br />
EMV auf Leiterplattenebene<br />
Die Einführung über die „EMV auf Leiterplattenebene“ übernahm<br />
der Moderator Hartwig Reindl, der als Ursache für EMV-Probleme<br />
„unsauberes Arbeiten“ nannte. EMV-gerechtes Layout beginnt bei<br />
der Erstellung des Stromlaufplans. Da sollte man „jedes“ Bauteil<br />
Funktionsgruppen/Modulen zuordnen, auf einen korrekten Massebezug<br />
achten und die richtige Platzierung (getrennt nach Analog-,<br />
Power- und Digitalteil und so weiter) der Komponenten (Bild<br />
5). Dabei sollte der EMV-Spezialist und nicht der PCB-Layouter<br />
das Massesystem vorgeben. Sinnvoll ist die Bewertung der Abstrahlung<br />
des Moduls mittels analoger Simulation.<br />
Bei der Auslegung der Masse kann nach folgenden Konzepten<br />
unterschieden werden (Bild 6): Vermaschung, flächige Masse und<br />
sternförmige Masse. Mitentscheidend, welches Konzept zum Einsatz<br />
kommt, sind die LP-Technologie (Zahl der Lagen), der Strombedarf,<br />
der Platz und die Schaltungsart (HF-Power, Analog-Eingangsteil,<br />
hoher Takt, High Speed und so weiter). Ein breitbandiges<br />
Ausfallverhalten bei der Störfestigkeit lässt sich oft auf ein ungenügendes<br />
Massesystem zurückführen; ein schmalbandiges<br />
Ausfallverhalten eher auf einzelne Bauelemente. Gut ist in jedem<br />
Fall eine durchgehende Masselage, die sich beispielsweise beim<br />
Multilayer realisieren lässt.<br />
Beim Einsatz von Blockkondensatoren, ist eine Anordnung nach<br />
Bild 7 anzustreben. Hierbei liefert der Kondensator den benötigten<br />
hohen Strom im Zeitbereich, deshalb sollte die Verbindung zum<br />
µC mit der maximalen Leiterbreite bei minimaler Leiterlänge erfolgen.<br />
Die Anbindung zum Versorgungssystem (V CC<br />
/GND) kann<br />
dagegen hochohmig sein, was die Störausbreitung reduziert.<br />
BGAs wurde ein eigenes Kapitel des Vortrags gewidmet. Durch<br />
Zusammenarbeit mit den IC-Herstellern ließ sich ein verbessertes<br />
Ballout erreichen. Bild 8 zeigt zwei Designs, die eine zusätzliche<br />
Filterung über Längsferrite oder Längswiderstände zulassen.<br />
High-Speed-Design und Signalintegrität<br />
„High-Speed-Design und Signal Integrity (SI)“ war das Thema von<br />
Wolfgang Röhrner, EMV Simulation, AVL Trimerics, Regensburg.<br />
Entscheidendes Kriterium beim High-Speed-/Low-Speed-Design<br />
ist die Signalanstiegszeit, nicht nur die Frequenz. Und wo es eng<br />
wird, kann mit einer Daumenregel abgeklärt werden: Als kritische<br />
Anstiegszeit gilt t r<br />
< 2,5 x t pd<br />
(t r<br />
=rise time, t pd<br />
=propagation delay).<br />
Bei einer t pd<br />
von 600 ps und einer Flankensteilheit/Anstiegszeit von<br />
500 ps liegt die kritische Länge bei 3 cm. Bei 1 ns wird es ab 6 cm<br />
kritisch und bei 2 ns ab 12 cm. Anstiegs- und Abfallzeit sowie der<br />
Ausgangswiderstand (Hi/Lo) können bei digitalen I/Os stark unterschiedlich<br />
sein. Die Eingangskapazität kann 3 bis 15 pF betragen.<br />
Einfluss haben diese Größen auf die Signalintegrität, hinzu<br />
kommt noch der starke Einfluss der Leiterplatte. (ah)<br />
n<br />
Der Autor: Siegfried W. Best ist freier Redakteur in Regensburg.<br />
68 <strong>elektronik</strong> <strong>industrie</strong> 02/2013<br />
www.<strong>elektronik</strong>-<strong>industrie</strong>.de