Sensoren - beam - Elektronik & Verlag
Sensoren - beam - Elektronik & Verlag
Sensoren - beam - Elektronik & Verlag

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
<strong>Sensoren</strong><br />
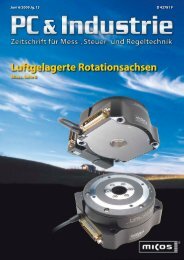
Bild 5: Beispiel einer Anschlussbelegung: Die differentiellen<br />
Eingänge 7 und 8 der EPOS2 50/5 können für den Empfang von<br />
analogen Signalen speziell konfiguriert werden. Alle Signale werden<br />
aufgrund der Störsicherheit differentiell übertragen. Spannungsversorgung<br />
des Encoders erfolgt entweder über die von der Steuerung<br />
erzeugten Hilfsspannung Vaux oder über eine externe Speisung.<br />
den muss. Die Ein- und Ausgänge<br />
der maxon EPOS2-Positioniersteuerungen<br />
unterstützen die<br />
elektrische Versorgung von zwei<br />
Inkrementalencodern (2-Kanal<br />
oder 3-Kanal bis zu 2,5 Millionen<br />
Impulse pro Umdrehung, RS-<br />
422-Schnittstelle) und ermöglichen<br />
Signalfrequenzen bis 5 MHz.<br />
Beispielsweise lassen sich selbst<br />
bei einer respektablen Drehzahl<br />
von 25.000 min -1 immer noch<br />
hochauflösende Encoder mit<br />
12.000 Impulsen pro Umdrehung<br />
verwenden (Bild 3).<br />
Digitale Inkrementalencoder<br />
stoßen an ihre Grenzen, wenn<br />
sehr hohe Impulszahlen benötigt<br />
werden. Neben Anwendungen<br />
mit extrem genauer<br />
Positionierung ist dies bei steifer<br />
Regelung und bei der Messung<br />
sehr kleiner Geschwindigkeiten<br />
der Fall. Encoder mit mehr als<br />
5000 Impulsen sind möglich, sie<br />
bauen aber meist groß (Durchmesser)<br />
und sind aufgrund der<br />
aufwändigeren Interpolations-<br />
elektronik teuer. Hohe Impulszahlen<br />
bedeuten bei höheren<br />
Drehzahlen auch hohe zu übertragende<br />
Frequenzen, was sich<br />
limitierend auf die Kabellänge<br />
auswirken kann.<br />
Analoge inkrementelle Encoder<br />
Einen Ausweg bieten hier die<br />
analogen Inkrementalencoder.<br />
Sie liefern anstelle der fest vorgegebenen<br />
Impulse ihrer digitalen<br />
Varianten sinusförmige<br />
Signale mit einer oder mehreren<br />
(bis einige hundert) Perioden<br />
pro Wellenumdrehung<br />
(oder pro maximalem Weg bei<br />
linearen Systemen). Daraus lässt<br />
sich die Position im Prinzip mit<br />
beliebiger Genauigkeit interpolieren.<br />
Der Anwender kann<br />
die Auflösung selber bestimmen.<br />
Eine gute Signalqualität<br />
mit identischen Amplituden<br />
(Verstärkung) auf beiden<br />
Kanälen ist allerdings entscheidend,<br />
um präzise Positionen zu<br />
errechnen. Um Störungen wäh-<br />
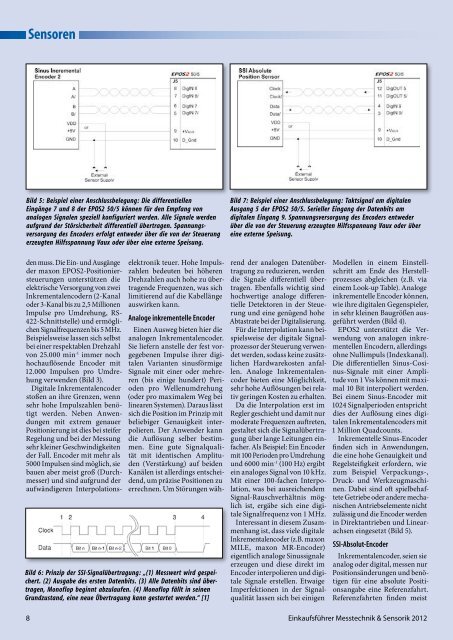
Bild 6: Prinzip der SSI-Signalübertragung: „(1) Messwert wird gespeichert.<br />
(2) Ausgabe des ersten Datenbits. (3) Alle Datenbits sind übertragen,<br />
Monoflop beginnt abzulaufen. (4) Monoflop fällt in seinen<br />
Grundzustand, eine neue Übertragung kann gestartet werden.“ [1]<br />
Bild 7: Beispiel einer Anschlussbelegung: Taktsignal am digitalen<br />
Ausgang 5 der EPOS2 50/5. Serieller Eingang der Datenbits am<br />
digitalen Eingang 9. Spannungsversorgung des Encoders entweder<br />
über die von der Steuerung erzeugten Hilfsspannung Vaux oder über<br />
eine externe Speisung.<br />
rend der analogen Datenübertragung<br />
zu reduzieren, werden<br />
die Signale differentiell übertragen.<br />
Ebenfalls wichtig sind<br />
hochwertige analoge differentielle<br />
Detektoren in der Steuerung<br />
und eine genügend hohe<br />
Abtastrate bei der Digitalisierung.<br />
Für die Interpolation kann beispielsweise<br />
der digitale Signalprozessor<br />
der Steuerung verwendet<br />
werden, sodass keine zusätzlichen<br />
Hardwarekosten anfallen.<br />
Analoge Inkrementalencoder<br />
bieten eine Möglichkeit,<br />
sehr hohe Auflösungen bei relativ<br />
geringen Kosten zu erhalten.<br />
Da die Interpolation erst im<br />
Regler geschieht und damit nur<br />
moderate Frequenzen auftreten,<br />
gestaltet sich die Signalübertragung<br />
über lange Leitungen einfacher.<br />
Als Beispiel: Ein Encoder<br />
mit 100 Perioden pro Umdrehung<br />
und 6000 min -1 (100 Hz) ergibt<br />
ein analoges Signal von 10 kHz.<br />
Mit einer 100-fachen Interpolation,<br />
was bei ausreichendem<br />
Signal-Rauschverhältnis möglich<br />
ist, ergäbe sich eine digitale<br />
Signalfrequenz von 1 MHz.<br />
Interessant in diesem Zusammenhang<br />
ist, dass viele digitale<br />
Inkrementalencoder (z.B. maxon<br />
MILE, maxon MR-Encoder)<br />
eigentlich analoge Sinussignale<br />
erzeugen und diese direkt im<br />
Encoder interpolieren und digitale<br />
Signale erstellen. Etwaige<br />
Imperfektionen in der Signalqualität<br />
lassen sich bei einigen<br />
Modellen in einem Einstellschritt<br />
am Ende des Herstellprozesses<br />
abgleichen (z.B. via<br />
einem Look-up Table). Analoge<br />
inkrementelle Encoder können,<br />
wie ihre digitalen Gegenspieler,<br />
in sehr kleinen Baugrößen ausgeführt<br />
werden (Bild 4).<br />
EPOS2 unterstützt die Verwendung<br />
von analogen inkrementellen<br />
Encodern, allerdings<br />
ohne Nullimpuls (Indexkanal).<br />
Die differentiellen Sinus-Cosinus-Signale<br />
mit einer Amplitude<br />
von 1 Vss können mit maximal<br />
10 Bit interpoliert werden.<br />
Bei einem Sinus-Encoder mit<br />
1024 Signalperioden entspricht<br />
dies der Auflösung eines digitalen<br />
Inkrementalencoders mit<br />
1 Million Quadcounts.<br />
Inkrementelle Sinus-Encoder<br />
finden sich in Anwendungen,<br />
die eine hohe Genauigkeit und<br />
Regelsteifigkeit erfordern, wie<br />
zum Beispiel Verpackungs-,<br />
Druck- und Werkzeugmaschinen.<br />
Dabei sind oft spielbehaftete<br />
Getriebe oder andere mechanischen<br />
Antriebselemente nicht<br />
zulässig und die Encoder werden<br />
in Direktantrieben und Linearachsen<br />
eingesetzt (Bild 5).<br />
SSI-Absolut-Encoder<br />
Inkrementalencoder, seien sie<br />
analog oder digital, messen nur<br />
Positionsänderungen und benötigen<br />
für eine absolute Positionsangabe<br />
eine Referenzfahrt.<br />
Referenzfahrten finden meist<br />
8 Einkaufsführer Messtechnik & Sensorik 2012