

i Detection of Smoke and Dust Aerosols Using Multi-sensor Satellite ...
i Detection of Smoke and Dust Aerosols Using Multi-sensor Satellite ...
i Detection of Smoke and Dust Aerosols Using Multi-sensor Satellite ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
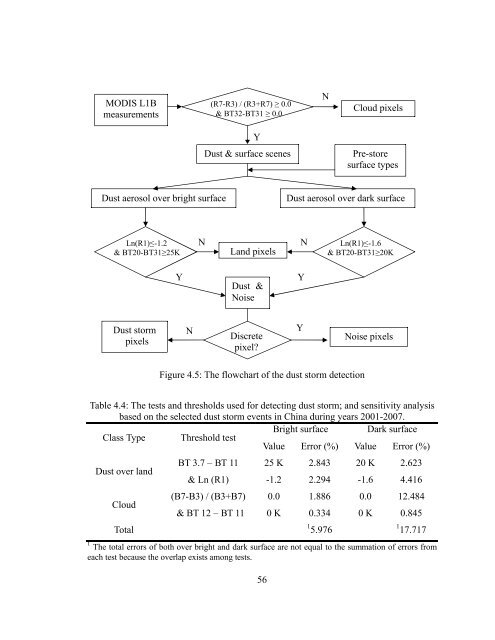
MODIS L1B<br />
measurements<br />
<strong>Dust</strong> aerosol over bright surface<br />
Ln(R1)≤-1.2<br />
& BT20-BT31≥25K<br />
<strong>Dust</strong> storm<br />
pixels<br />
Figure 4.5: The flowchart <strong>of</strong> the dust storm detection<br />
Table 4.4: The tests <strong>and</strong> thresholds used for detecting dust storm; <strong>and</strong> sensitivity analysis<br />
based on the selected dust storm events in China during years 2001-2007.<br />
Bright surface Dark surface<br />
Class Type Threshold test<br />
Value Error (%) Value Error (%)<br />
<strong>Dust</strong> over l<strong>and</strong><br />
Cloud<br />
Total<br />
Y<br />
N<br />
N<br />
BT 3.7 –BT 11<br />
& Ln (R1)<br />
(B7-B3) / (B3+B7)<br />
& BT 12 –BT 11<br />
(R7-R3) / (R3+R7) ≥ 0.0<br />
& BT32-BT31 ≥ 0.0<br />
Y<br />
<strong>Dust</strong> & surface scenes<br />
L<strong>and</strong> pixels<br />
<strong>Dust</strong> &<br />
Noise<br />
Discrete<br />
pixel?<br />
56<br />
25 K<br />
-1.2<br />
0.0<br />
0 K<br />
<strong>Dust</strong> aerosol over dark surface<br />
2.843<br />
2.294<br />
1.886<br />
0.334<br />
1 5.976<br />
20 K<br />
-1.6<br />
0.0<br />
0 K<br />
2.623<br />
4.416<br />
12.484<br />
0.845<br />
1 17.717<br />
1 The total errors <strong>of</strong> both over bright <strong>and</strong> dark surface are not equal to the summation <strong>of</strong> errors from<br />
each test because the overlap exists among tests.<br />
N<br />
Y<br />
Y<br />
N<br />
Cloud pixels<br />
Pre-store<br />
surface types<br />
Ln(R1)≤-1.6<br />
& BT20-BT31≥20K<br />
Noise pixels

![[Sample B: Approval/Signature Sheet] - George Mason University](https://img.yumpu.com/21978828/1/190x245/sample-b-approval-signature-sheet-george-mason-university.jpg?quality=85)

![[Sample B: Approval/Signature Sheet] - George Mason University](https://img.yumpu.com/18694905/1/190x245/sample-b-approval-signature-sheet-george-mason-university.jpg?quality=85)





![[Sample B: Approval/Signature Sheet] - George Mason University](https://img.yumpu.com/18694552/1/189x260/sample-b-approval-signature-sheet-george-mason-university.jpg?quality=85)

![[Sample B: Approval/Signature Sheet] - George Mason University](https://img.yumpu.com/18694474/1/190x245/sample-b-approval-signature-sheet-george-mason-university.jpg?quality=85)