

A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
5.5. Hierarchical Composition 91<br />
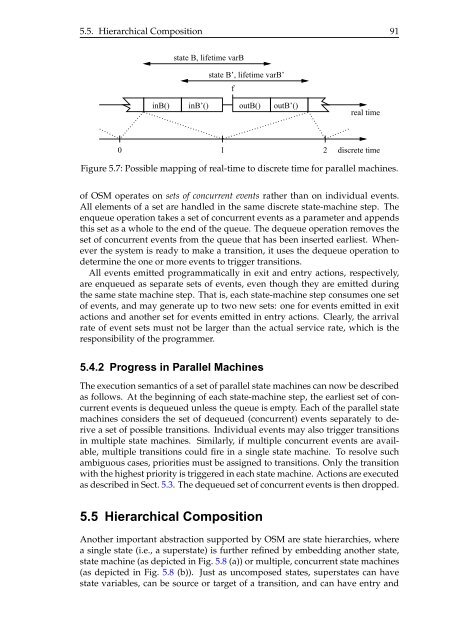
state B, lifetime varB<br />
state B’, lifetime varB’<br />
inB() inB’() outB()<br />
f<br />
outB’()<br />
real time<br />
0 1<br />
2 discrete time<br />
Figure 5.7: Possible mapping of real-time to discrete time <strong>for</strong> parallel machines.<br />
of OSM operates on sets of concurrent events rather than on individual events.<br />
All elements of a set are handled in the same discrete state-machine step. The<br />
enqueue operation takes a set of concurrent events as a parameter and appends<br />
this set as a whole to the end of the queue. The dequeue operation removes the<br />
set of concurrent events from the queue that has been inserted earliest. Whenever<br />
the system is ready to make a transition, it uses the dequeue operation to<br />
determine the one or more events to trigger transitions.<br />
All events emitted programmatically in exit and entry actions, respectively,<br />
are enqueued as separate sets of events, even though they are emitted during<br />
the same state machine step. That is, each state-machine step consumes one set<br />
of events, and may generate up to two new sets: one <strong>for</strong> events emitted in exit<br />
actions and another set <strong>for</strong> events emitted in entry actions. Clearly, the arrival<br />
rate of event sets must not be larger than the actual service rate, which is the<br />
responsibility of the programmer.<br />
5.4.2 Progress in Parallel Machines<br />
The execution semantics of a set of parallel state machines can now be described<br />
as follows. At the beginning of each state-machine step, the earliest set of concurrent<br />
events is dequeued unless the queue is empty. Each of the parallel state<br />
machines considers the set of dequeued (concurrent) events separately to derive<br />
a set of possible transitions. Individual events may also trigger transitions<br />
in multiple state machines. Similarly, if multiple concurrent events are available,<br />
multiple transitions could fire in a single state machine. To resolve such<br />
ambiguous cases, priorities must be assigned to transitions. Only the transition<br />
with the highest priority is triggered in each state machine. Actions are executed<br />
as described in Sect. 5.3. The dequeued set of concurrent events is then dropped.<br />
5.5 Hierarchical Composition<br />
Another important abstraction supported by OSM are state hierarchies, where<br />
a single state (i.e., a superstate) is further refined by embedding another state,<br />
state machine (as depicted in Fig. 5.8 (a)) or multiple, concurrent state machines<br />
(as depicted in Fig. 5.8 (b)). Just as uncomposed states, superstates can have<br />
state variables, can be source or target of a transition, and can have entry and













