

A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks
A State-Based Programming Model for Wireless Sensor Networks

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4.2. The Anatomy of <strong>Sensor</strong>-Node Programs 73<br />
INIT<br />
init_done<br />
NORMAL_OPERATION<br />
SAMPLE<br />
sample_done (n)ack timeout<br />
SEND<br />
wakeup sleep<br />
SLEEP<br />
IDLE<br />
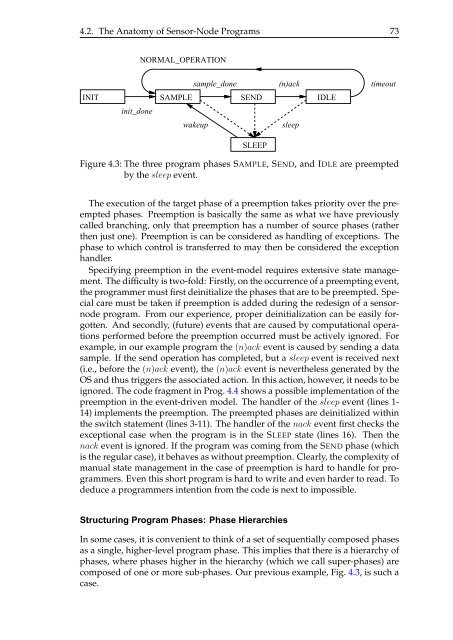
Figure 4.3: The three program phases SAMPLE, SEND, and IDLE are preempted<br />
by the sleep event.<br />
The execution of the target phase of a preemption takes priority over the preempted<br />
phases. Preemption is basically the same as what we have previously<br />
called branching, only that preemption has a number of source phases (rather<br />
then just one). Preemption is can be considered as handling of exceptions. The<br />
phase to which control is transferred to may then be considered the exception<br />
handler.<br />
Specifying preemption in the event-model requires extensive state management.<br />
The difficulty is two-fold: Firstly, on the occurrence of a preempting event,<br />
the programmer must first deinitialize the phases that are to be preempted. Special<br />
care must be taken if preemption is added during the redesign of a sensornode<br />
program. From our experience, proper deinitialization can be easily <strong>for</strong>gotten.<br />
And secondly, (future) events that are caused by computational operations<br />
per<strong>for</strong>med be<strong>for</strong>e the preemption occurred must be actively ignored. For<br />
example, in our example program the (n)ack event is caused by sending a data<br />
sample. If the send operation has completed, but a sleep event is received next<br />
(i.e., be<strong>for</strong>e the (n)ack event), the (n)ack event is nevertheless generated by the<br />
OS and thus triggers the associated action. In this action, however, it needs to be<br />
ignored. The code fragment in Prog. 4.4 shows a possible implementation of the<br />
preemption in the event-driven model. The handler of the sleep event (lines 1-<br />
14) implements the preemption. The preempted phases are deinitialized within<br />
the switch statement (lines 3-11). The handler of the nack event first checks the<br />
exceptional case when the program is in the SLEEP state (lines 16). Then the<br />
nack event is ignored. If the program was coming from the SEND phase (which<br />
is the regular case), it behaves as without preemption. Clearly, the complexity of<br />
manual state management in the case of preemption is hard to handle <strong>for</strong> programmers.<br />
Even this short program is hard to write and even harder to read. To<br />
deduce a programmers intention from the code is next to impossible.<br />
Structuring Program Phases: Phase Hierarchies<br />
In some cases, it is convenient to think of a set of sequentially composed phases<br />
as a single, higher-level program phase. This implies that there is a hierarchy of<br />
phases, where phases higher in the hierarchy (which we call super-phases) are<br />
composed of one or more sub-phases. Our previous example, Fig. 4.3, is such a<br />
case.













